技术特征:
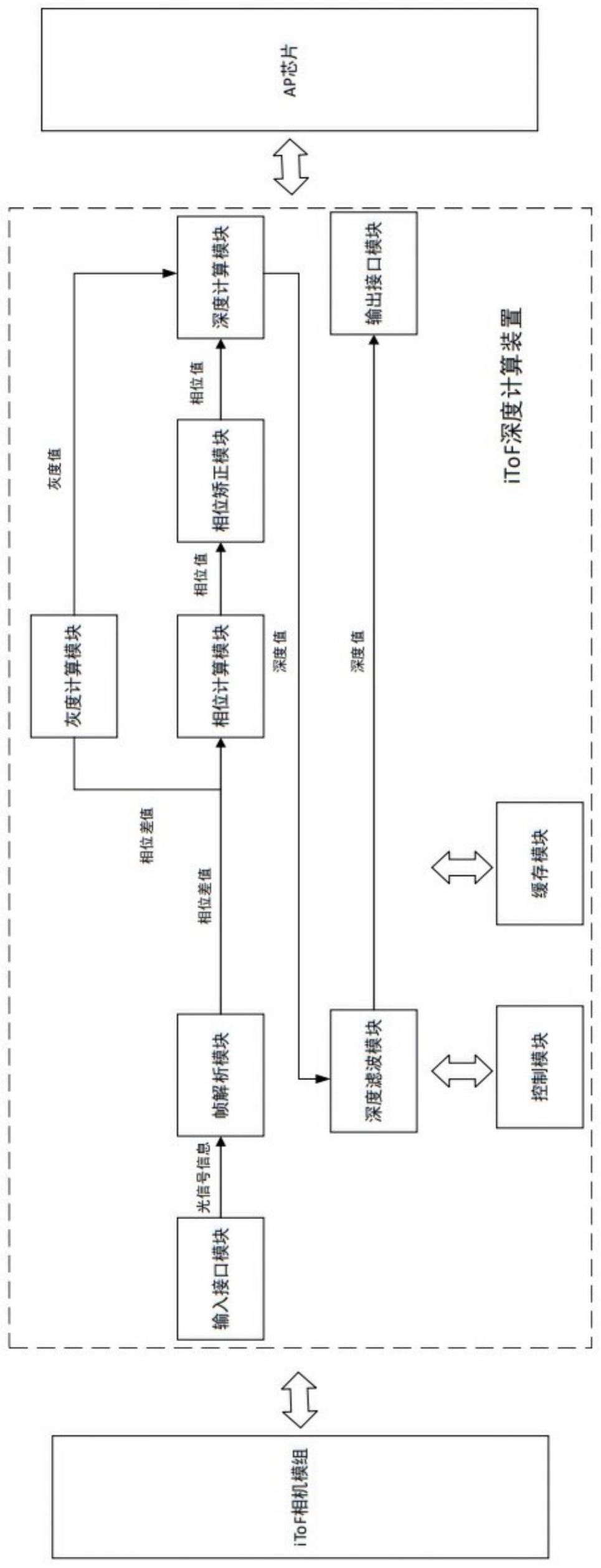
1.一种itof深度计算装置,包括:帧解析模块,用于将光信号信息解析为解析后的信息,所述解析后的信息包括四相位延时数据,所述帧解析模块根据所述四相位延时数据计算相位差值;相位计算模块,根据所述相位差值计算相位值;相位校正模块,对所述相位值进行校正,得到校正后的相位值;深度计算模块,对所述校正后的相位值进行深度计算,得到深度值;深度滤波模块,对所述深度值进行滤波,得到滤波后的深度值。2.如权利要求1所述的itof深度计算装置,还包括:灰度计算模块,用于根据所述相位差值计算灰度值。3.如权利要求2所述的itof深度计算装置,还包括:接口输出模块,用于输出所述滤波后的深度值和所述灰度值。4.如权利要求1所述的itof深度计算装置,其中,所述解析后的信息还包括曝光时间信息和温度信息。5.如权利要求4所述的itof深度计算装置,还包括hdr模块,用于读取相位差值,并根据所述曝光时间信息对每个像素的长短曝光特性进行hdr计算,得到hdr计算后的相位差值,所述相位计算模块根据所述hdr计算后的相位差值计算相位值。6.如权利要求4所述的itof深度计算装置,其中,所述相位校正模块根据所述温度信息拟合得到相位补偿值,并根据所述相位补偿值对所述相位值进行校正。7.如权利要求1所述的itof深度计算装置,其中,所述相位校正模块基于itof相机模组的标定信息计算得到相位补偿值,并根据所述相位补偿值对所述相位值进行校正。8.如权利要求1所述的itof深度计算装置,还包括:接口输入模块,用于接收来自itof相机模组的光信号信息,并将所述光信号信息发送至所述帧解析模块。9.如权利要求1所述的itof深度计算装置,还包括双频融合模块,所述深度值包括第一深度值和第二深度值,所述双频融合模块用于对所述第一深度值和所述第二深度值进行双频融合计算,得到双频融合后的深度值,所述深度滤波模块对所述双频融合后的深度值进行滤波,得到滤波后的深度值。10.如权利要求3所述的itof深度计算装置,还包括点云计算模块、点云滤波模块和点云旋转模块,其中:所述点云计算模块用于对所述滤波后的深度值进行点云计算,得到点云值;所述点云滤波模块用于对所述点云值进行滤波,得到滤波后的点云值;所述点云旋转模块用于对所述滤波后的点云值进行旋转,得到旋转后的点云值;所述接口输出模块输出所述旋转后的点云值和所述灰度值。11.如权利要求1所述的itof深度计算装置,还包括ae模块,用于根据所述相位差值计算当前场景下的曝光值。12.如权利要求1所述的itof深度计算装置,还包括控制模块和缓存模块,其中:所述控制模块配置所述itof深度计算装置中各个模块的配置参数;所述缓存模块存储所述配置参数和所述itof深度计算装置中各个模块处理后的数据。13.一种itof深度计算方法,包括:通过帧解析模块将所述光信号信息解析为解析后的信息,所述解析后的信息包括四相
位延时数据,所述帧解析模块根据所述四相位延时数据计算相位差值;通过相位计算模块根据所述相位差值计算相位值;通过相位校正模块对所述相位值进行校正,得到校正后的相位值;通过深度计算模块对所述校正后的相位值进行深度计算,得到深度值;以及通过深度滤波模块对所述深度值进行滤波,得到滤波后的深度值。14.如权利要求13所述的itof深度计算方法,还包括:通过灰度计算模块根据所述相位差值计算灰度值。15.如权利要求14所述的itof深度计算方法,还包括:通过接口输出模块输出所述滤波后的深度值和所述灰度值。16.如权利要求13所述的itof深度计算方法,其中,所述解析后的信息还包括曝光时间信息和温度信息。17.如权利要求16所述的itof深度计算方法,还包括通过hdr模块读取相位差值,并根据所述曝光时间信息对每个像素的长短曝光特性进行hdr计算,得到hdr计算后的相位差值,所述相位计算模块根据所述hdr计算后的相位差值计算相位值。18.如权利要求16所述的itof深度计算方法,其中,所述通过相位校正模块对所述相位值进行校正包括:根据所述温度信息拟合得到相位补偿值,并根据所述相位补偿值对所述相位值进行校正。19.如权利要求13所述的itof深度计算方法,其中,所述通过相位校正模块对所述相位值进行校正包括:基于itof模组的标定信息计算得到相位补偿值,并根据所述相位补偿值对所述相位值进行校正。20.如权利要求13所述的itof深度计算方法,还包括:通过输入接口模块接收来自itof相机模组的光信号信息,并将所述光信号信息发送至所述帧解析模块。21.如权利要求13所述的itof深度计算方法,其中,所述深度值包括第一深度值和第二深度值,所述方法还包括通过双频融合模块对所述第一深度值和所述第二深度值进行双频融合计算,得到双频融合后的深度值,通过所述深度滤波模块对所述双频融合后的深度值进行滤波,得到滤波后的深度值。22.如权利要求15所述的itof深度计算方法,还包括:通过点云计算模块对所述滤波后的深度值进行点云计算,得到点云值;通过点云滤波模块对所述点云值进行滤波,得到滤波后的点云值;通过点云旋转模块对所述滤波后的点云值进行旋转,得到旋转后的点云值;通过所述接口输出模块输出所述旋转后的点云值和所述灰度值。23.如权利要求13所述的itof深度计算方法,还包括:通过ae模块根据所述相位差值计算当前场景下的曝光值。24.如权利要求13所述的itof深度计算方法,还包括:通过控制模块配置所述itof深度计算装置中各个模块的配置参数;以及通过缓存模块存储所述配置参数和所述itof深度计算装置中各个模块处理后的数据。25.一种itof相机模组,包括如权利要求1至12任一者所述的itof深度计算装置,其中:所述itof深度计算装置对光信号信息进行处理得到深度值信息和灰度值信息或者点云值信息和灰度值信息。
26.一种itof深度计算系统,包括itof相机模组、ap芯片和如权利要求1至12任一者所述的itof深度计算装置,其中:所述itof相机模组用于输出光信号信息,所述光信号信息由所述itof深度计算装置处理得到深度值信息和灰度值信息或者点云值信息和灰度值信息,所述ap芯片用于接收所述深度值和所述灰度值信息或者所述点云值信息和所述灰度值信息。27.一种itof深度计算系统,包括如权利要求25所述的itof相机模组和ap芯片,其中:所述itof相机模组中的所述itof深度计算装置对光信号信息进行处理得到深度值信息和灰度值信息或者点云值信息和灰度值信息,所述ap芯片用于接收所述深度值和所述灰度值信息或者所述点云值信息和所述灰度值信息。
技术总结
本申请涉及iToF深度计算装置、方法、iToF相机模组和系统,该装置包括接口输入模块、帧解析模块、灰度计算模块、相位计算模块、相位校正模块、深度计算模块、深度滤波模块、接口输出模块、控制模块和缓存模块。本申请提供的iToF深度计算装置、方法、iToF相机模组和系统,能够根据不同类型的相机模组,配置和调整iToF深度计算装置中各个模块的配置参数,从而达到兼容不同类型的相机模组的目的;并且,本申请的方案输出的结果为最终的深度值和灰度值或者最终的点云值和灰度值,用户不需要继续计算或调整;另外,本申请的iToF深度计算装置的硬件实现方式,能够实现数据的并行处理,从而提升处理速度。理速度。理速度。
技术研发人员:俞冠华 钱仁瑞 向可 奕科杰
受保护的技术使用者:浙江舜宇智能光学技术有限公司
技术研发日:2021.12.10
技术公布日:2023/6/14
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。