技术特征:
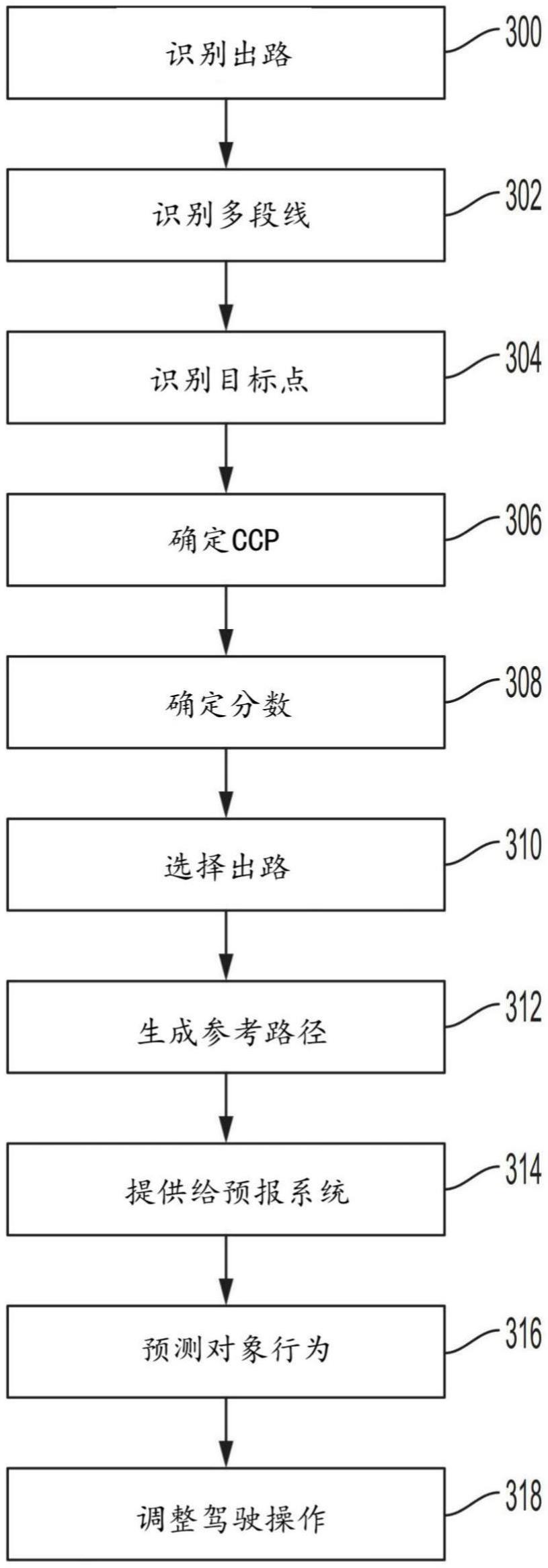
1.一种方法,包括:由自主车辆的一个或多个电子设备:识别交叉路口,识别所述交叉路口附近的对象,识别所述交叉路口的多个出路,对于每个出路:识别与所述出路相关联的多段线,识别沿着所述多段线的目标点,以及确定从所述对象到所述目标点的恒定曲率路径,至少部分基于出路的所述恒定曲率路径来确定与每个出路相关联的分数,基于出路的分数来生成包括所述多个出路中的一个或多个出路的出路剪枝集,以及对于剪枝集中的每个出路,生成从所述对象到所述出路的所述目标点的参考路径。2.根据权利要求1所述的方法,还包括:使用所生成的参考路径中的一个或多个来预测所述对象通过所述交叉路口的轨迹;以及基于所预测的所述对象通过所述交叉路口的所述轨迹来调整所述自主车辆的一个或多个驾驶操作。3.根据权利要求1所述的方法,其中,识别沿着所述多段线的目标点包括识别位于离所述出路的端部一定距离的目标点。4.根据权利要求1所述的方法,其中,确定从所述对象到所述目标点的恒定曲率路径包括通过以下操作在对象坐标系中将圆拟合到所述对象和所述目标点:将所述对象的旋转中心定位在原点位置;对所述圆应用点约束和斜率约束,使得所述圆通过所述原点位置;以及对所述圆应用第二点约束,使得所述圆通过所述目标点。5.根据权利要求1所述的方法,其中,至少部分基于出路的恒定曲率路径来确定与每个出路相关联的分数包括:确定航向差异值;确定曲率参数;确定所述对象的横向加速度;以及将所述航向差异值、所述曲率参数和所述横向加速度相加。6.根据权利要求5所述的方法,其中,确定航向差异值包括确定所述出路的目标点处的余弦距离。7.根据权利要求5所述的方法,其中,确定曲率参数包括将函数应用于所述恒定曲率路径的曲率。8.根据权利要求7所述的方法,其中,如果所述恒定曲率路径的曲率太急而不能穿过所述出路,则所述函数的结果是第一值,其中,如果所述恒定曲率路径的曲率不是太急而能够穿过所述出路,则所述结果是第二值。9.根据权利要求5所述的方法,其中,确定所述对象的横向加速度包括:识别所述出路的恒定曲率路径的曲率;
确定所述对象的速度;对所述对象的速度求平方以生成平方值;以及确定所述曲率和所述平方值的乘积。10.根据权利要求1所述的方法,其中,基于出路的分数来生成包括所述多个出路中的一个或多个出路的出路剪枝集包括:从所述多个出路中识别分数小于阈值的一个或多个出路。11.根据权利要求1所述的方法,其中,生成从移动对象到所述出路的目标点的参考路径包括在地图坐标系中生成所述对象与所述目标点之间的样条。12.根据权利要求1所述的方法,其中,所述参考路径中的一个或多个未与地图坐标系的所绘制的车道段对齐。13.根据权利要求1所述的方法,还包括对于所生成的参考路径中的一个或多个:确定通向与所述参考路径相关联的出路的一个或多个所绘制的车道段;以及确定所绘制的车道段中的一个或多个是否与所述参考路径匹配。14.根据权利要求13所述的方法,还包括:响应于确定只有一个所绘制的车道段与所述参考路径匹配,将与所述一个所绘制的车道段相关联的元数据的至少一部分应用于所述参考路径。15.根据权利要求13所述的方法,还包括:响应于确定多个所绘制的车道段与所述参考路径匹配并且所述多个所绘制的车道段具有相同的元数据,将与所述多个所绘制的车道段中的一个相关联的元数据的至少一部分应用于所述参考路径。16.根据权利要求13所述的方法,还包括:响应于确定没有与所述参考路径匹配的所绘制的车道段,将默认元数据应用于所述参考路径,其中,所述默认元数据包括指令所述自主车辆为所述交叉路口中的一个或多个行动者让行的一个或多个指令。17.根据权利要求1所述的方法,其中,生成从所述对象到所述出路的目标点的参考路径包括生成不同于通过所述交叉路口的一个或多个所绘制的车道段的参考路径。18.一种系统,包括:自主车辆的一个或多个电子设备;以及计算机可读存储介质,包括当被执行时使所述电子设备中的一个或多个执行以下操作的一个或多个编程指令:识别交叉路口,识别所述交叉路口附近的对象,识别所述交叉路口的多个出路,对于每个出路:识别与所述出路相关联的多段线,识别沿着所述多段线的目标点,以及确定从所述对象到所述目标点的恒定曲率路径,至少部分基于出路的所述恒定曲率路径来确定与每个出路相关联的分数,基于出路的分数来生成包括所述多个出路中的一个或多个出路的出路剪枝集,以及
对于剪枝集中的每个出路,生成从所述对象到所述出路的所述目标点的参考路径。19.根据权利要求18所述的系统,其中,所述计算机可读存储介质还包括当被执行时使所述电子设备中的一个或多个执行以下操作的一个或多个编程指令:使用所生成的参考路径中的一个或多个来预测所述对象通过所述交叉路口的轨迹;以及基于所预测的所述对象通过所述交叉路口的所述轨迹来调整所述自主车辆的一个或多个驾驶操作。20.根据权利要求18所述的系统,其中,当被执行时使所述电子设备中的一个或多个识别沿着所述多段线的目标点的一个或多个编程指令包括:当被执行时使所述电子设备中的一个或多个识别位于离所述出路的端部一定距离的目标点的一个或多个编程指令。21.根据权利要求18所述的系统,其中,当被执行时使所述电子设备中的一个或多个确定从所述对象到所述目标点的恒定曲率路径的一个或多个编程指令包括:当被执行时使所述电子设备中的一个或多个通过以下操作在对象坐标系中将圆拟合到所述对象和所述目标点的一个或多个编程指令:将所述对象的旋转中心定位在原点位置;对所述圆应用点约束和斜率约束,使得所述圆通过所述原点位置;以及对所述圆应用第二点约束,使得所述圆通过所述目标点。22.根据权利要求18所述的系统,其中,当被执行时使所述电子设备中的一个或多个至少部分地基于出路的恒定曲率路径来确定与每个出路相关联的分数的一个或多个编程指令包括:当被执行时使所述电子设备中的一个或多个执行以下操作的所述一个或多个编程指令:确定航向差异值;确定曲率参数;确定所述对象的横向加速度;以及将所述航向差异值、所述曲率参数和所述横向加速度相加。23.根据权利要求22所述的系统,其中,当被执行时使所述电子设备中的一个或多个确定航向差异值的一个或多个编程指令包括:当被执行时使所述电子设备中的一个或多个确定所述出路的目标点处的余弦距离的一个或多个编程指令。24.根据权利要求22所述的系统,其中,当被执行时使所述电子设备中的一个或多个确定曲率参数的一个或多个编程指令包括:当被执行时使所述电子设备中的一个或多个将函数应用于所述恒定曲率路径的曲率的一个或多个编程指令。25.根据权利要求24所述的系统,其中,如果所述恒定曲率路径的曲率太急而不能穿过所述出路,则所述函数的结果是第一值,其中,如果所述恒定曲率路径的曲率不是太急而能够穿过所述出路,则所述结果是第二值。26.根据权利要求22所述的系统,其中,当被执行时使所述电子设备中的一个或多个确定所述对象的横向加速度的一个或多个编程指令包括:当被执行时使所述电子设备中的一个或多个执行以下操作的一个或多个编程指令:识别所述出路的恒定曲率路径的曲率;确定所述对象的速度;
对所述对象的速度求平方以生成平方值;以及确定所述曲率和所述平方值的乘积。27.根据权利要求18所述的系统,其中,当被执行时使所述电子设备中的一个或多个基于出路的分数从所述多个出路中移除一个或多个出路以生成出路剪枝集的一个或多个编程指令包括:当被执行时使所述电子设备中的一个或多个从所述多个出路中识别分数小于阈值的一个或多个出路的一个或多个编程指令。28.根据权利要求18所述的系统,其中,当被执行时使所述电子设备中的一个或多个生成从移动对象到所述出路的目标点的参考路径的一个或多个编程指令包括:当被执行时使所述电子设备中的一个或多个在地图坐标系中生成所述对象与所述目标点之间的样条的一个或多个编程指令。29.根据权利要求18所述的系统,其中,所述参考路径中的一个或多个未与地图坐标系的所绘制的车道段对齐。30.根据权利要求18所述的系统,其中,所述计算机可读存储介质还包括当被执行时使所述电子设备中的一个或多个针对所生成的参考路径中的一个或多个执行以下操作的一个或多个编程指令:确定通向与所述参考路径相关联的出路的一个或多个所绘制的车道段;以及确定所绘制的车道段中的一个或多个是否与所述参考路径匹配。31.根据权利要求30所述的系统,其中,所述计算机可读存储介质还包括当被执行时使所述电子设备中的一个或多个执行以下操作的一个或多个编程指令:响应于确定只有一个所绘制的车道段与所述参考路径匹配,将与所述一个所绘制的车道段相关联的元数据的至少一部分应用于所述参考路径。32.根据权利要求30所述的系统,其中,所述计算机可读存储介质还包括当被执行时使所述电子设备中的一个或多个执行以下操作的一个或多个编程指令:响应于确定多个所绘制的车道段与所述参考路径匹配并且所述多个所绘制的车道段具有相同的元数据,将与所述多个所绘制的车道段中的一个相关联的元数据的至少一部分应用于所述参考路径。33.根据权利要求30所述的系统,其中,所述计算机可读存储介质还包括当被执行时使所述电子设备中的一个或多个执行以下操作的一个或多个编程指令:响应于确定没有与所述参考路径匹配的所绘制的车道段,将默认元数据应用于参考路径,其中,所述默认元数据包括指令所述自主车辆为所述交叉路口中的一个或多个行动者让行的一个或多个指令。34.根据权利要求18所述的系统,其中,当被执行时使所述电子设备中的一个或多个生成从所述对象到所述出路的目标点的参考路径的一个或多个编程指令包括:当被执行时使所述电子设备中的一个或多个生成不同于通过所述交叉路口的一个或多个所绘制的车道段的参考路径的一个或多个编程指令。35.一种计算机程序产品,包括存储编程指令的存储器,所述编程指令被配置为使处理器:识别交叉路口;识别所述交叉路口附近的对象;
识别所述交叉路口的多个出路;对于每个出路:识别与所述出路相关联的多段线,识别沿着所述多段线的目标点,以及确定从所述对象到所述目标点的恒定曲率路径;至少部分基于出路的所述恒定曲率路径来确定与每个出路相关联的分数;基于出路的分数来生成包括所述多个出路中的一个或多个出路的出路剪枝集;以及对于剪枝集中的每个出路,生成从所述对象到所述出路的所述目标点的参考路径。36.一种方法,包括:由自主车辆的一个或多个电子设备:识别所述自主车辆的环境中正在表现出未被辨识的行为或在一定时间段内已经表现出未被辨识的行为的行动者,生成与所述行动者相关联的圆,其中,所述圆的半径是所述行动者的速度的函数,识别与所述行动者相关联的一个或多个目标点,其中,每个目标点表示沿着所述行动者的可能路线的点,其中,每个目标点沿着所述圆的圆周定位,给每个目标点分配分数,选择与最低分数相关联的目标点,以及生成从所述行动者到所选择的目标点的参考路径。37.根据权利要求36所述的方法,还包括:使用所述参考路径来预测所述行动者的预测路径;以及基于所预测的所述行动者的预测路径来调整所述自主车辆的一个或多个驾驶操作。38.根据权利要求36所述的方法,其中,识别所述自主车辆的环境中正在表现出未被辨识的行为或在一定时间段内已经表现出未被辨识的行为的行动者包括:将所述行动者的行为与所述自主车辆的已被辨识的行为的一个或多个策略进行比较;以及如果所述行为不对应于所述一个或多个策略,则将所述行为识别为未被辨识的行为。39.根据权利要求36所述的方法,其中,生成与所述行动者相关联的圆包括生成具有所述半径的所述圆,其中,所述半径表示预测所述行动者将合并回交通流中的距离。40.根据权利要求36所述的方法,其中,识别与所述行动者相关联的一个或多个目标点包括:识别位于所述行动者相对于其航向的前方的一个或多个车道,其中,每个车道包括中心线;以及对于每个所识别的车道,确定所述圆与所述车道的中心线的交点。41.根据权利要求36所述的方法,其中,给每个目标点分配分数包括:确定航向差异值;确定曲率参数;确定所述行动者的横向加速度;以及将所述航向差异值、所述曲率参数和所述横向加速度相加。42.根据权利要求41所述的方法,其中,确定航向差异值包括确定所述目标点处的余弦
距离。43.根据权利要求41所述的方法,其中,确定曲率参数包括将函数应用于与穿过所述行动者与所述目标点之间的路径相关联的曲率。44.根据权利要求43所述的方法,其中,如果所述路径的曲率太急而不能穿过,则所述函数的结果是第一值,其中,如果所述路径的曲率不是太急而能够穿过,则所述结果是第二值。45.根据权利要求41所述的方法,其中,确定所述行动者的横向加速度包括:识别所述行动者与所述目标点之间的路径的曲率;确定所述行动者的速度;对所述行动者的速度求平方以生成平方值;以及确定所述曲率和所述平方值的乘积。46.根据权利要求36所述的方法,其中,生成从所述行动者到所选择的目标点的参考路径包括生成所述行动者与所述目标点之间的样条。47.一种方法,包括:由自主车辆的一个或多个电子设备:识别所述自主车辆的环境中正在表现出未被辨识的行为或在一定时间段内已经表现出未被辨识的行为的行动者,确定所述行动者是否曾在一定时间段内跟随过车道并且现在未占用任何车道,响应于确定所述行动者曾在所述时间段内跟随过车道并且现在未占用任何车道,预测所述行动者将沿着其当前路径向前移动,以及响应于没有确定所述行动者曾在所述时间段内跟随过车道并且现在未占用任何车道:生成与所述行动者相关联的圆,其中,所述圆的半径是所述行动者的速度的函数,识别与所述行动者相关联的一个或多个目标点,其中,每个目标点表示沿着所述行动者的可能路线的点,其中,每个目标点沿着所述圆的圆周定位,给每个目标点分配分数,选择与最低分数相关联的目标点,以及生成从所述行动者到所选择的目标点的参考路径。48.一种系统,包括:自主车辆的一个或多个电子设备;计算机可读存储介质,包括当被执行时使所述一个或多个电子设备执行以下操作的一个或多个编程指令:识别所述自主车辆的环境中正在表现出未被辨识的行为或在一定时间段内已经表现出未被辨识的行为的行动者,生成与所述行动者相关联的圆,其中,所述圆的半径是所述行动者的速度的函数,识别与所述行动者相关联的一个或多个目标点,其中,每个目标点表示沿着所述行动者的可能路线的点,其中,每个目标点沿着所述圆的圆周定位,给每个目标点分配分数,选择与最低分数相关联的目标点,以及生成从所述行动者到所选择的目标点的参考路径。
49.根据权利要求48所述的系统,其中,所述计算机可读存储介质还包括当被执行时使所述一个或多个电子设备执行以下操作的一个或多个编程指令:使用所述参考路径来预测所述行动者的预测路径;以及基于所预测的所述行动者的预测路径来调整所述自主车辆的一个或多个驾驶操作。50.根据权利要求48所述的系统,其中,当被执行时使所述一个或多个电子设备识别所述自主车辆的环境中正在表现出未被辨识的行为或在一定时间段内已经表现出未被辨识的行为的行动者的一个或多个编程指令包括:当被执行时使所述一个或多个电子设备执行以下操作的一个或多个编程指令:将所述行动者的行为与所述自主车辆的已被辨识的行为的一个或多个策略进行比较;以及如果所述行为不对应于所述一个或多个策略,则将所述行为识别为未被辨识的行为。51.根据权利要求48所述的系统,其中,当被执行时使所述一个或多个电子设备生成与所述行动者相关联的圆的一个或多个编程指令包括:当被执行时使所述一个或多个电子设备生成具有所述半径的所述圆的一个或多个编程指令,其中,所述半径表示预测所述行动者将合并回交通流中的距离。52.根据权利要求48所述的系统,其中,当被执行时使所述一个或多个电子设备识别与所述行动者相关联的一个或多个目标点的一个或多个编程指令包括:当被执行时使所述一个或多个电子设备执行以下操作的一个或多个编程指令:识别位于所述行动者相对于其航向的前方的一个或多个车道,其中,每个车道包括中心线;以及对于每个所识别的车道,确定所述圆与所述车道的中心线的交点。53.根据权利要求48所述的系统,其中,当被执行时使所述一个或多个电子设备给每个目标点分配分数的一个或多个编程指令包括:当被执行时使所述一个或多个电子设备执行以下操作的所述一个或多个编程指令:确定航向差异值;确定曲率参数;确定所述行动者的横向加速度;以及将所述航向差异值、所述曲率参数和所述横向加速度相加。54.根据权利要求53所述的系统,其中,当被执行时使所述一个或多个电子设备确定航向差异值的一个或多个编程指令包括:当被执行时使所述一个或多个电子设备确定所述目标点处的余弦距离的一个或多个编程指令。55.根据权利要求53所述的系统,其中,当被执行时使所述一个或多个电子设备确定曲率参数的一个或多个编程指令包括:当被执行时使所述一个或多个电子设备将函数应用于与穿过所述行动者与所述目标点之间的路径相关联的曲率的一个或多个编程指令。56.根据权利要求55所述的系统,其中,如果所述路径的曲率太急而不能穿过,则所述函数的结果是第一值,其中,如果所述路径的曲率不是太急而能够穿过,则所述结果是第二值。57.根据权利要求53所述的系统,其中,当被执行时使所述一个或多个电子设备确定所述行动者的横向加速度的一个或多个编程指令包括:当被执行时使所述一个或多个电子设
备执行以下操作的一个或多个编程指令:识别所述行动者与所述目标点之间的路径的曲率;确定所述行动者的速度;对所述行动者的速度求平方以生成平方值;以及确定所述曲率和所述平方值的乘积。58.根据权利要求48所述的系统,其中,当被执行时使所述一个或多个电子设备生成从所述行动者到所选择的目标点的参考路径的一个或多个编程指令包括:当被执行时使所述一个或多个电子设备生成所述行动者与所述目标点之间的样条的一个或多个编程指令。59.一种计算机程序产品,包括存储编程指令的存储器,所述编程指令被配置为使处理器:识别自主车辆的环境中正在表现出未被辨识的行为或在一定时间段内已经表现出未被辨识的行为的行动者;生成与所述行动者相关联的圆,其中,所述圆的半径是所述行动者的速度的函数;识别与所述行动者相关联的一个或多个目标点,其中,每个目标点表示沿着所述行动者的可能路线的点,其中,每个目标点沿着所述圆的圆周定位;给每个目标点分配分数;选择与最低分数相关联的目标点;以及生成从所述行动者到所选择的目标点的参考路径。60.一种计算机程序产品,包括存储编程指令的存储器,所述编程指令被配置为使处理器:识别所述自主车辆的环境中正在表现出未被辨识的行为或在一定时间段内已经表现出未被辨识的行为的行动者;确定所述行动者是否曾在一定时间段内跟随过车道并且现在未占用任何;响应于确定所述行动者曾在所述时间段内跟随过车道并且现在未占用任何车道,预测所述行动者将沿着其当前路径向前移动;以及响应于没有确定所述行动者曾在所述时间段内跟随过车道并且现在未占用任何车道:生成与所述行动者相关联的圆,其中,所述圆的半径是所述行动者的速度的函数,识别与所述行动者相关联的一个或多个目标点,其中,每个目标点表示沿着所述行动者的可能路线的点,其中,每个目标点沿着所述圆的圆周定位,给每个目标点分配分数,选择与最低分数相关联的目标点,以及生成从所述行动者到所选择的目标点的参考路径。
技术总结
自主车辆识别交叉路口,识别交叉路口附近的对象,识别交叉路口的多个出路,并且对于每个出路,识别与出路相关联的多段线,识别沿着多段线的目标点,并且确定从对象到目标点的恒定曲率路径。该系统至少部分基于出路的恒定曲率路径来确定与每个出路相关联的分数,基于出路的分数来生成包括多个出路中的一个或多个出路的出路剪枝集,以及对于剪枝集中的每个出路,生成从对象到出路的目标点的参考路径。生成从对象到出路的目标点的参考路径。生成从对象到出路的目标点的参考路径。
技术研发人员:A
受保护的技术使用者:埃尔构人工智能有限责任公司
技术研发日:2021.09.29
技术公布日:2023/6/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。