1.本发明涉及煤仓巡检机器人清洁技术领域,具体涉及煤仓巡检机器人清洁装置。
背景技术:
2.由于煤仓为封闭空间,现对仓内部的仓壁损坏情况、仓内壁挂煤情况、仓内的环境湿度、仓内煤的温度、仓内煤堆积情况、有害气体分布情况等无法进行巡检,只有发生仓体破损、煤高温、有害气体溢出报警等情况时发现异常。通过机器人进入煤仓内部,对煤仓内部进行无人巡检和异常情况自动报警,解决目前煤仓内部无巡检的问题。
3.巡检机器人设置有一个可沿着煤仓三百六十度转动的探测镜头,通过煤仓上方的释放件将巡检机器人向下移动,进而观察内部的环境,但是这样操作方式存在的问题是,由于在此过程中,容易使得仓内壁的挂煤土脱落以及内部煤灰的影响,使得巡检机器人的表面出现大量的落灰,这样造成摄像头观察的范围受限,而现有的操作方式是通过外部的高速气流吹动,使得表面的灰尘离开,在实际操作中发现,由于巡检机器人达到起始位置后,在吹灰的过程中易造成灰尘在内部飞扬,颗粒物会二次附着,另外是飞扬的颗粒与镜头表面产生撞击,造成镜头损伤。
技术实现要素:
4.为解决上述技术问题,本发明提出一种煤仓巡检机器人清洁装置。
5.本发明的技术方案是这样实现的:一种煤仓巡检机器人清洁装置,其特征在于,包括:
6.第一高压泵和第二高压泵,其设置在巡检机器人的停机仓上,第一高压泵通过分流管形成第一气流分流、第二气流分流;
7.弧形风口件,其设置在停机仓的内壁上,用于将第一气流分流转化为沿径向吹巡检机器人的气流,且第二气流分流用于驱动镜头保护结构将机器人镜头包裹;
8.顶部清洁部分,其设置在停机仓内部,顶部清洁部分包括壳体及设置在壳体内用于引入第二高压泵吹出的风流的风道,风道内设置有被气流驱动的叶轮;
9.叶轮通过轴套转动套设在壳体中心的环形壁上,风道的底部呈敞口状,且轴套外侧面的底部设置有与壳体侧壁过盈配合以封闭风道底端敞口的环板,环板外侧设置有用于清扫巡检机器人顶部的顶部清扫件,壳体中心的环形壁的底部向侧向延伸有位于环板底部的环托,且环板与环托上均设置有在圆周方向呈间隔分布的排风口。
10.进一步地,弧形风口件包括竖直弧形部分和水平弧形部分,竖直弧形部分固定连接有固定座,固定座上下两侧设置有弧形限位片,固定座的上下两侧均固定连接有正反转电机,正反转电机的输出端固定连接有橡胶轮,水平弧形部分设置有用于排出第一气流分流的气嘴。
11.进一步地,风道为设置在壳体内的环形腔,且风道底部的敞口形成在轴套和壳体侧壁之间,风道内壁设置有引入第二高压泵气流用于驱动叶轮转动的导向气道,且顶部清
扫件包括设置在环板上的用于清扫机器人顶部的呈中心对称分布的多组刷布条。
12.进一步地,排风口包括呈圆孔状的第一风口和第二风口,及呈弧形孔状的第三风口,第一风口和第三风口均开设在环板上,第二风口开设在环托上,环形壁底部设置有呈底端向外倾斜的环形导流套。
13.进一步地,弧形风口件的内表面设置有气压位移机构,气压位移机构的内侧端设置有柱形气压分配套,柱形气压分配套上设置有呈内外分布的镜头清洁部分及镜头包裹件,其中:
14.气压位移机构设置成通过引入第二气流分流带动柱形气压分配套向内侧位移,并使得第二气流分流驱动镜头包裹件从外围将镜头包裹及镜头清洁部分清扫镜头。
15.进一步地,镜头清洁部分包括气流导向座,气流导向座的表面开设有多个与气道口连通的弧形通口,气流导向座的左侧设置有导流片,气流导向座的右侧固定连接有环形连接座,环形连接座内设置有膨胀膜,膨胀膜的表面设置有柔性布,膨胀膜的右侧设置有十字清洁条,膨胀膜的轴心处设置有与气流导向座内腔连通的微气孔。
16.进一步地,气压位移机构包括管座,管座内设置有膨胀腔,膨胀腔内套设有滑塞,滑塞的右侧设置有气管件,气管件上设置有环形气槽口,气管件的右端固定连接有安装板,管座上固定连接有固定板,固定板与安装板之间弹性连接,固定板上下两侧设置有弧形座。
17.进一步地,煤仓巡检机器人清洁装置还包括环形驱动件,环形驱动件包括两个转动环,转动环在两侧的弧形座和弧形限位片的内壁接触,转动环与橡胶轮的表面接触。
18.进一步地,煤仓巡检机器人清洁装置还包括环形设置的竖向清洁刷,竖向清洁刷设置在弧形风口件内壁的一侧,竖向清洁刷包括固定杆,固定杆上设置有转套,转套上下端固定连接有释放轮,释放轮的内壁与转动环的表面相抵,固定杆上下两端固定连接有转轴座,下方转轴座顶部固定连接有转轴套,上方转轴座上转动设置有驱动杆,驱动杆上套设有从动轮,释放轮通过传送带与从动轮传动连接,驱动杆的底端贯穿转轴套顶部抽芯处,驱动杆位于转轴套内的部分套设有清洁辊,清洁辊的表面设置有刷毛。
19.进一步地,释放轮与转动环接触的面具有弧形接触部分和内凹部分,释放轮的轴心槽直径大于固定杆,释放轮的轴心槽内通过平面涡转弹簧与固定杆内壁弹性连接。
20.本发明具有如下有益效果:
21.1、本发明气嘴由四个组成吹向巡检机器人通道的气流,并且气流略微向下设置,这样当对向向下吹动的气流与巡检机器人顶部接触时,能够使得部分的灰尘向煤仓内吹动,而对向气流受到气流扰动,可将顶部的灰尘形成回流的态势进行清除,进而提高了顶部灰尘清除的效果,而当巡检机器人继续向上移动时,倾斜设置的气流可与巡检机器人外侧壁接触,在气流的作用下,可使巡检机器人表面的灰尘向下吹送,进而能够起到预清理的目的,进而可以增加整体的清理效果,避免后期清理的过程表面灰尘较多,清理时造成设备表面出现划痕的问题,提高安全性。
22.2、本发明设置多个竖向清洁刷,在弧形风口件上的正反转电机的作用下,与橡胶轮带动转动环转动,继而两个转动环能够在转动时带动上侧的释放轮转动,进而释放轮转动的情况下,通过传送带带动从动轮转动,进而位于转轴套内的清洁辊转动,清洁辊上的刷毛与巡检机器人的侧壁接触,进而能够将巡检机器人表面的灰尘进行清扫,而当转动环移动至一定的行程后,释放轮上的弧形接触部分与转动环接触过程中,转动至内凹部分的位
置时,释放轮均可以通过传送带使得清洁辊进行清扫操作,而当内凹部分与转动环表面靠近后,内凹部分与转动环之间分离,这样在平面涡转弹簧的作用下,释放轮反向转动,这样能够使得刷毛反向转动,继而增加与巡检机器人高频交替清扫的状态,这样提高了侧壁的清扫的效果,增加了表面的清洁度,而转轴套的设置,可使得内部的刷毛转动的过程中,刷毛与转轴套接触后,能够将刷毛上的灰尘进行清除。
23.3、本发明在巡检机器人顶部与顶部清洁部分接触后,通过第二高压泵高速气流进入到风道内后,气流与叶轮接触后,气流驱动叶轮转动,由于叶轮转动时,带动轴套转动,进而轴套底端的环板能够在环托顶部转动,进而与环板连接的连接套能够随着转动,这样固定在连接套上的多个承杆沿着连接套的轴心转动,这样承杆上的斜杆能够在转动时,将巡检机器人顶部的残留的灰尘沿着转动方向进行刮除,使得刮除的灰尘在堆积后,沿着倾斜的角度向外部刮除并向外排出,由于斜杆转动设置在转槽,这样在转动的过程中,由于转动设置的缘故,斜杆可进行微微摆动,这样有两个好处,第一斜杆可沿着预设的状态下对灰尘清扫,而当斜杆上的刷布条上的刷布与巡检机器人顶部出现摩擦时,斜杆沿着摩擦的位置转动,进而进行清扫的操作。
24.4、本发明环板在环托顶部转动时,壳体侧壁用于将风道内的气流进行封闭,这样设置的好处在于,一是能够提供有效的动,使得叶轮能够持续的转动,而且风道内的气压增加时,壳体侧壁能够避免气流外溢,使得叶轮转动时带动环板转动,这样环板上第一风口与第二风口连通时,能够将内部的高压气流进行泄流操作,这样多个第一风口与第二风口内产生的气流快速地排出,这样内部的气流能够快速地成喷射状态与巡检机器人的顶部接触,进而实现气喷的目的,这样有利于将中部的灰尘向外侧喷射,进而有利于对盲区进行清灰,使得灰尘吹向刷布条行经的路线上,进而可以通过强气流进行清灰操作,而当第三风口与下方的第二风口重合时,由于第三风口路经常,排气的时间增加,这样内部的气流会在第三风口经过每个第二风口时,能够进行持续的导流操作,进而持续地将上方的灰尘吹出,两种吹灰的方式,一种持续地沿着圆周方向吹灰,另一种在固定的点进行气爆式吹灰,沿着圆周方向转动吹灰可使得灰尘向外侧扩散,气爆式吹灰可使得灰尘快速地向外侧吹动,这样三种方式配合,提高了清灰的效率时,可提高对顽渍进行清除,而且还提高清灰的洁净效果,由于环形导流套的斜面位于第二风口的下方,这样使得气流的方向改变,这样气流外出的路径衍射巡检机器人表面从轴心向外侧吹动,有利于将灰尘向外侧吹出。
25.5、本发明隔离腔内的气压通过气压阀进入到膨胀硅胶环内后,膨胀硅胶环内气流聚集后,膨胀硅胶环能够膨胀,进而镜头外壳与环形隔层接触后,膨胀硅胶环膨胀后,受到伸缩硅胶圈的向外侧延伸,并逐渐向径向实现包裹的状态,进而环形筋条受限后,塑形条向内部包裹,这样能够使得伸缩硅胶圈包裹后,逐渐地与镜头外壳接触,进而能够实现对镜头包裹的状态,这样能够将镜头与外部环境隔离,这样能够保护镜头的安全,不会受到灰尘的颗粒刮蹭,提高巡检机器人的安全。
26.6、本发明镜头清洁部分的设置,膨胀硅胶环内的气流从气道口进入到弧形通口内,这样一来,气流进入气流导向座内,这样气流导向座内的气压上升,使得气流导向座内的膨胀膜膨胀,这样膨胀膜的表面与镜头的凸面接触,使得膨胀膜能够适应镜头弧度,进而能够完全与镜头接触,由于设置有十字清洁条在膨胀膜膨胀时,首先与镜头表面接触,这样接触面成线状,而且镜头清洁部分为转动的状态,这样能够首先被十字清洁条刮除,进而能
够将附着的灰尘刮除,由于膨胀膜使用镜头弧度时,十字清洁条也会完全与镜头表面接触,接触面积小,转动时产生的摩擦小,这样能够在保护镜头的同时,实现对镜头的灰尘清除,微气孔起到释放气压的作用,使得膨胀膜接触镜头时,不会产生过大的压力,这样能够起到整体清洁的作用,而且能够增加摄像头的使用寿命。
附图说明
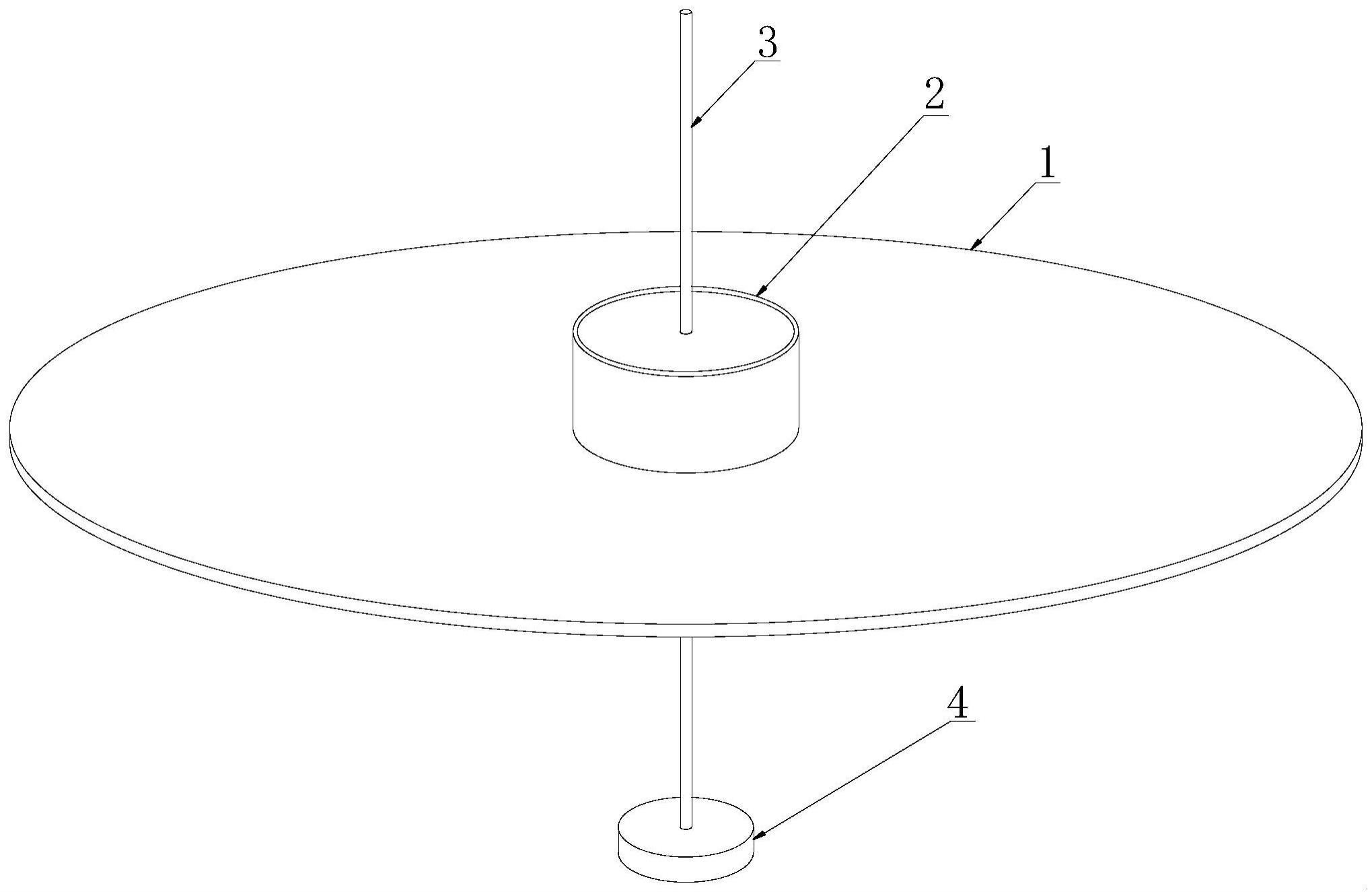
27.图1是本发明一种煤仓巡检机器人清洁装置的示意图;
28.图2是本发明一种煤仓巡检机器人清洁装置中停机仓正面剖视图;
29.图3是本发明一种煤仓巡检机器人清洁装置顶部清洁部分中正面剖视图;
30.图4是本发明一种煤仓巡检机器人清洁装置图3中c处放大图;
31.图5是本发明一种煤仓巡检机器人清洁装置中排风口的示意图;
32.图6是本发明一种煤仓巡检机器人清洁装置图2中a处放大图;
33.图7是本发明一种煤仓巡检机器人清洁装置中释放轮的示意图;
34.图8是本发明一种煤仓巡检机器人清洁装置图2中b处放大图;
35.图9是本发明一种煤仓巡检机器人清洁装置中镜头包裹件的示意图;
36.图10是本发明一种煤仓巡检机器人清洁装置中镜头包裹件局部剖视图;
37.图11是本发明一种煤仓巡检机器人清洁装置中镜头清洁部分的示意图;
38.图12是本发明一种煤仓巡检机器人清洁装置中柱形气压分配套的示意图;
39.图13是本发明一种煤仓巡检机器人清洁装置中柱形气压分配套剖视图;
40.图14是本发明一种煤仓巡检机器人清洁装置中气压位移机构的剖视图。
具体实施方式
41.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.请参阅1至14所示,本发明提供的一种煤仓巡检机器人清洁装置,包括:
43.第一高压泵11和第二高压泵10,其设置在巡检机器人4的停机仓2上,第一高压泵11通过分流管形成第一气流分流、第二气流分流;停机仓2设置在煤仓1的顶部,且有一个与停机仓2内径相等的进入通道,巡检机器人4通过绳索3吊升的方式实现巡检机器人在不同的高度进行探测。弧形风口件6,其设置在停机仓2的内壁上,用于将第一气流分流转化为沿径向吹巡检机器人4的气流,且第二气流分流用于驱动镜头保护结构9将机器人镜头包裹。
44.顶部清洁部分5,其设置在停机仓2内部,顶部清洁部分5包括壳体51及设置在壳体51内用于引入第二高压泵10吹出的风流的风道53,风道53内设置有被气流驱动的叶轮55;
45.叶轮55通过轴套56转动套设在壳体51中心的环形壁54上,风道53的底部呈敞口状,且轴套56外侧面的底部设置有与壳体侧壁57过盈配合以封闭风道53底端敞口的环板58,环板58外侧设置有用于清扫巡检机器人4顶部的顶部清扫件,壳体中心的环形壁的底部向侧向延伸有位于环板58底部的环托518,且环板58与环托518上均设置有在圆周方向呈间隔分布的排风口。
46.当完成对煤仓进行巡检时,巡检机器人4进行清洁操作时,绳索3将巡检机器人4从煤仓1内拉升到停机仓2内时,第一高压泵11通过分流管形成的第一气流分流通过弧形风口件6上水平弧形部分设置的排出气嘴61内向径向的位置吹动,这样当巡检机器人4经过时,能够将巡检机器人4表面上附着的灰尘进行清除,该处气流速度慢,主要用于对巡检机器人4进行预处理;
47.在完成上述操作后,巡检机器人4移动至停机仓2内,通过调节巡检机器人4上的摄像头的位置,使得摄像头朝向镜头保护结构9的位置上,这样第一高压泵11上的第二气流分流在镜头保护结构9内,镜头保护结构9在第二气流的作用下,首先在径向移动,进而镜头保护结构9能够与镜头接触,接触后在气流的作用下能够对镜头形成包裹的状态,并且镜头保护结构9中部可对镜头表面灰尘进行清洁,当然该处产生的第二气流可由管路上的气阀控制,当巡检机器人4进入后,气阀能够将第二气流关闭;
48.在上述的过程中,第二高压泵10高速气流进入到风道53内,这样吹向风道53内的叶轮55的表面时,能够使得叶轮55在转动时,带动环板58外侧设置的顶部清扫件能够转动,这样能够将巡检机器人4顶部的落灰进行清理,在顶部清扫件清扫的过程中,由于环板58与环托518上均设置有在圆周方向呈间隔分布的排风口,这样能够在清扫中,内部的气流经过排风口的位置时,产生的气流能够与巡检机器人4的顶部接触,气流经过后能够将顶部的落灰进行彻底的清扫;
49.此过程中,弧形风口件6内正反转电机62带动环形驱动件7转动,由于环形驱动件7与竖向清洁刷8接触,这样当环形驱动件7转动的过程中,能够使得竖向清洁刷8自转动,进而竖向清洁刷8在巡检机器人4的表面进行清扫,而当竖向清洁刷8转动一定的路程时,竖向清洁刷8可实现回向清扫,这样能够有效地将巡检机器人4侧壁上的灰尘清除干净,而此过程中,由于镜头保护结构9将镜头进行包裹,能够在保护镜头的同时实现对巡检机器人4的表面的清洁。
50.参照2和图6所示,弧形风口件6包括竖直弧形部分和水平弧形部分,竖直弧形部分固定连接有固定座,固定座上下两侧设置有弧形限位片64,固定座的上下两侧均固定连接有正反转电机62,正反转电机62的输出端固定连接有橡胶轮63,水平弧形部分设置有用于排出第一气流分流的气嘴61。煤仓巡检机器人清洁装置还包括环形驱动件7,环形驱动件7包括两个转动环12,转动环12在两侧的弧形座和弧形限位片64的内壁接触,转动环12与橡胶轮63的表面接触。
51.弧形风口件6有四个,呈环形等距离设置在停机仓2内,这样气嘴61由四个组成吹向巡检机器人4通道的气流,并且气流略微向下设置,这样当对向向下吹动的气流与巡检机器人4顶部接触时,能够使得部分的灰尘向煤仓1内吹动,而对向气流受到气流扰动,可将顶部的灰尘形成回流的态势进行清除,进而提高了顶部灰尘清除的效果,而当巡检机器人4继续向上移动时,倾斜设置的气流可与巡检机器人4外侧壁接触,在气流的作用下,可使巡检机器人4表面的灰尘向下吹送,进而能够起到预清理的目的,进而可以增加整体的清理效果,避免后期清理的过程表面灰尘较多,清理时造成设备表面出现划痕的问题,提高安全性。
52.参照图1、图6和图7所示,煤仓巡检机器人清洁装置还包括环形设置的竖向清洁刷8,竖向清洁刷8设置在弧形风口件6内壁的一侧,竖向清洁刷8包括固定杆81,固定杆81上设
置有转套,转套上下端固定连接有释放轮82,释放轮82的内壁与转动环12的表面相抵,固定杆81上下两端固定连接有转轴座83,下方转轴座83顶部固定连接有转轴套87,上方转轴座83上转动设置有驱动杆,驱动杆上套设有从动轮84,释放轮82通过传送带88与从动轮84传动连接,驱动杆的底端贯穿转轴套87顶部抽芯处,驱动杆位于转轴套87内的部分套设有清洁辊85,清洁辊85的表面设置有刷毛86,释放轮82与转动环12接触的面具有弧形接触部分89和内凹部分810,释放轮82的轴心槽直径大于固定杆81,释放轮82的轴心槽内通过平面涡转弹簧811与固定杆81内壁弹性连接。
53.环形设置的多个竖向清洁刷8,在弧形风口件6上的正反转电机62的作用下,与橡胶轮63带动转动环12转动,继而两个转动环12能够在转动时带动上侧的释放轮82转动,进而释放轮82转动的情况下,通过传送带88带动从动轮84转动,进而位于转轴套87内的清洁辊85转动,清洁辊85上的刷毛86与巡检机器人4的侧壁接触,进而能够将巡检机器人4表面的灰尘进行清扫,而当转动环12移动至一定的行程后,释放轮82上的弧形接触部分89与转动环12接触过程中,转动至内凹部分810的位置时,释放轮82均可以通过传送带88使得清洁辊85进行清扫操作,而当内凹部分810与转动环12表面靠近后,内凹部分810与转动环12之间分离,这样在平面涡转弹簧811的作用下,释放轮82反向转动,这样能够使得刷毛86反向转动,继而增加与巡检机器人4高频交替清扫的状态,这样提高了侧壁的清扫的效果,增加了表面的清洁度,而转轴套87的设置,可使得内部的刷毛86转动的过程中,刷毛86与转轴套87接触后,能够将刷毛86上的灰尘进行清除。
54.参照图2、图3、图4和图5所示,风道53为设置在壳体51内的环形腔,且风道53底部的敞口状包裹在轴套56的外围,风道53内壁设置有与第二高压泵10出气管连通的用于叶轮55的导向气道52,且顶部清扫件包括设置在环板58上的用于清扫机器人顶部的呈中心对称分布的多组刷布条517;
55.顶部清扫件包括连接在环板58外侧的连接套59,连接套59的外部下侧固定连接有承杆510,承杆510底部的转槽519内转动设置有转动杆515,转动杆515底端固定连接有斜杆516,斜杆516的底部固定连接有刷布条517。
56.在巡检机器人4顶部与顶部清洁部分5接触后,通过第二高压泵10高速气流进入到风道53内后,气流与叶轮55接触后,气流驱动叶轮55转动,由于叶轮55转动时,带动轴套56转动,进而轴套56底端的环板58能够在环托518顶部转动,进而与环板58连接的连接套59能够随着转动,这样固定在连接套59上的多个承杆510沿着连接套59的轴心转动,这样承杆510上的刷布条517能够在转动时,将巡检机器人4顶部的残留的灰尘沿着转动方向进行清扫刮除,使得刮除的灰尘在堆积后,沿着倾斜的角度向外部刮除并向外排出,由于斜杆516转动设置在转槽519内,这样转动杆515在转槽519内转动的过程中,转动杆515沿轴线位置转动时可晃动,由于转动设置的缘故,斜杆516可进行微微摆动,这样有两个好处,第一斜杆516可沿着预设的状态下对灰尘清扫,而当斜杆516上的刷布条517上的刷布与巡检机器人4顶部出现摩擦时,斜杆516沿着摩擦的位置转动微调,进而便于使刷布条517与巡检机器人4顶部贴合。
57.在上述的操作中,排风口包括第一风口512、第二风口513和第三风口514,第一风口512、第二风口513为圆形孔,第三风口514的弧形风口,第一风口512和第三风口514设置在环板58上,第二风口513设置在环托518上,环形壁54底部设置有呈底端向外倾斜的环形
导流套511。
58.环板58在环托518顶部转动时,壳体侧壁57用于将风道53内的气流进行封闭,这样设置的好处在于,一是能够提供有效的动,使得叶轮55能够持续的转动,而且风道53内的气压增加时,壳体侧壁57能够避免气流外溢,使得叶轮55转动时带动环板58转动,这样环板58上第一风口512与第二风口513连通时,能够将内部的高压气流进行泄流操作,这样多个第一风口512与第二风口513内产生的气流快速的排出,这样内部的气流能够快速的成喷射状态与巡检机器人4的顶部接触,进而实现气喷的目的,这样有利于将中部的灰尘向外侧喷射,进而有利于对盲区进行清灰,使得灰尘吹向刷布条517行径的路线上,进而可以通过强气流进行清灰操作,而当第三风口514与下方的第二风口513重合时,由于第三风口514路经常,排气的时间增加,这样内部的气流会在第三风口514经过每个第二风口513时,能够进行持续的导流操作,进而持续的将上方的灰尘吹出,两种吹灰的方式,一种持续的沿着圆周方向吹灰,另一种在固定的点进行气爆式吹灰,沿着圆周方向转动吹灰可使得灰尘向外侧扩散,气爆式吹灰可使得灰尘快速的向外侧吹动,这样三种方式配合,提高了清灰的效率时,可提高对顽渍进行清除,而且还提高清灰的洁净效果,由于环形导流套511的斜面位于第二风口513的下方,这样使得气流的方向改变,这样气流外出的路径衍射巡检机器人4表面从轴心向外侧吹动,有利于将灰尘向外侧吹出。
59.参照图2和图8所示的弧形风口件6的内表面设置有气压位移机构94,气压位移机构94的内侧端设置有柱形气压分配套91,柱形气压分配套91上设置有呈内外分布的镜头清洁部分97及镜头包裹件95,气压位移机构94设置成通过引入第二气流分流带动柱形气压分配套91向内侧位移,并使得第二气流分流驱动镜头包裹件95从外围将镜头包裹及镜头清洁部分97清扫镜头。
60.其中,柱形气压分配套91为镜头保护结构9的一部分,柱形气压分配套91具有呈外侧端敞口且内侧端封闭的套体911,套体911的内侧端中心位置开设有第一分流口915,套体911的内底壁与侧壁之间设置有环形且封闭的隔离腔916,隔离腔916的外侧端内圈设置有呈环形的环形隔层96,且环形隔离层96与套体911的侧壁之间形成有在轴向位于隔离腔916外侧的环形气压腔912,环形气压腔912与隔离腔916之间设置有气压阀914;
61.柱形气压分配套91的一侧通过气压位移机构94支撑在弧形风口件6的内壁,弧形风口件6内壁设置有环形固定套93,气压位移机构94固定连接在环形固定套93内,且气压位移机构94用于驱动柱形气压分配套91径向位移,并在柱形气压分配套91向内位移至最远位置后将第二气流分流引入至隔离腔916及通过第一分流口915引入至套体911内。
62.镜头保护结构9工作时,当摄像头移动至镜头保护结构9平齐的位置上时,第二气流接通气压位移机构94,第二气流经过气压位移机构94使其内部发生膨胀,进而气压位移机构94能够向内侧移动,当镜头保护结构9与摄像头的位置接触后,气压位移机构94内的气流进入到柱形气压分配套91内,并分成两个气路,一个气路进入到驱动腔内,并与镜头清洁部分97部分产生气流冲击使得镜头清洁部分97转动,另一气路从环形气压腔912内进入到镜头包裹件95内腔,这样镜头包裹件95内膨胀将镜头壳体的外围实现包裹的状态,而内部的气流会沿着镜头包裹件95内腔内进入到镜头清洁部分97内腔,这样镜头清洁部分97膨胀后,能够与镜面接触,由于接触的过程中,镜头清洁部分97转动,可使得镜头镜片表面上的灰尘进行擦拭和清理,这样设置的目的,不仅仅是为了防止飞溅的颗粒对镜头镜片造成损
伤,而且还能够在清理巡检机器人外壳的过程中,避免灰尘二次附着,起到隔离的作用,并且可以将原先附着的灰尘进行擦拭清除的操作。
63.参照图14所示的气压位移机构94包括与第二气流连通的管座941,管座941内设置有膨胀腔942,膨胀腔942内套设有滑塞943,滑塞943的右侧设置有气管件946,气管件946上设置有环形气槽口944,气管件946的右端固定连接有安装板945,管座941上固定连接有固定板947,固定板947与安装板945之间通过多个复位弹簧弹性连接,固定板947上下两侧设置有弧形座,套体911内腔左侧内壁设置有外排孔92,外排孔92用于将从第一分流口915进入到套体911左侧内腔的气流向外疏导,隔离腔916设置有第二分流口。
64.当气压位移机构94受到第二气流分流的作用时,第二气流分流进入管座941内腔时,向膨胀腔942内流动时,膨胀腔942内的滑塞943受到气压的作用,能够在膨胀腔942内向右侧移动,进而管座941内腔与膨胀腔942之间形成开启的状态,第二气流分流从环形设置的环形气槽口944内进入到气管件946内,而此过程中,第二气流分流继续向外侧推动气管件946,继而固定在气管件946外端的安装板945与固定板947相互远离,这样能够与镜头保护结构9平齐的位置上摄像头相互靠近,并逐渐接触,与此同时,第二气流分流从气管件946内分流一部分进入套体911内的第一分流口915内,用于使镜头清洁部分97转动,第二气流分流并从外排孔92内向外侧排出,使得气流能够顺畅的外排,进而使得气流可以稳定驱动镜头清洁部分97转动,第二气流分流从气管件946处分流剩下一部分的气流进入到进隔离腔916内,可使得镜头包裹件95膨胀,并同时使得镜头清洁部分97膨胀靠近镜头镜片,当然为了保证第二气流分流从气管件946内形成两股分流,在气管件946的外端与第一分流口915和隔离腔916之间可设置三通管,三通管将第二气流分流分别输送进第二分流口和第一分流口915内。
65.参照图9和图10所示的环形气压腔912内设置有镜头包裹件95,镜头包裹件95的内侧端固定在环形气压腔912内底壁上,其外侧端设置成在气压膨胀作用下运动至环形气压腔912外部用于从外部包裹镜头,镜头包裹件95包括两个固定环条951,两个固定环条951分别固定连接在环形气压腔912内壁的两侧,即套体911内壁和环形隔层96内壁的位置,两个固定环条951的外侧固定连接有膨胀硅胶环955,膨胀硅胶环955外围通过伸缩硅胶圈952与固定环条951的一侧固定连接,内部固定环条951内设置有气道口954,膨胀硅胶环955内设置有环形筋条953,环形筋条953的一侧设置有多个塑形条;
66.当隔离腔916内的气压通过气压阀914进入到膨胀硅胶环955内后,膨胀硅胶环955内气流聚集后,膨胀硅胶环955逐渐膨胀,进而镜头外壳与环形隔层96右侧圆周面接触后,膨胀硅胶环955膨胀后,伸缩硅胶圈952的向外侧延伸,并逐渐向径向实现包裹的状态,并由于环形筋条953受限后,与镜头接触的位置的膨胀硅胶环955不会膨胀,进而使得环形筋条953外围的塑形条受到膨胀硅胶环955的作用向内部包裹,而且此时随着内部的压力增加,伸缩硅胶圈952逐渐外移,逐渐地使得膨胀硅胶环955完全包裹住镜头外壳,进而能够实现对镜头包裹的状态,这样能够将镜头与外部环境隔离,这样能够保护镜头的安全,不会受到灰尘的颗粒刮蹭,提高巡检机器人4在清洁时镜头的安全。
67.参照图11所示的镜头清洁部分97设置在套体911内腔右侧的旋转腔913内,镜头清洁部分97包括气流导向座972,气流导向座972的表面开设有多个弧形通口971,弧形通口971与气道口954连通,环形隔层96上设置有用于弧形通口971与气道口954连通的通道,用
于将进入到膨胀硅胶环955气流引入到气流导向座972内,气流导向座972的左侧设置有导流片976,气流导向座972的右侧固定连接有环形连接座,环形连接座内设置有膨胀膜973,膨胀膜973的表面设置有柔性布,膨胀膜973的右侧设置有十字清洁条975,膨胀膜973的轴心处设置有与气流导向座972内腔连通的微气孔974。
68.镜头清洁部分97的设置,膨胀硅胶环955内的气流从气道口954进入到弧形通口971内,这样一来,微气孔974首先引出一部分气流,当微气孔974靠近镜头的位置时,形成直射的气流朝向镜片轴心位置上吹动,气流会沿着镜片的弧度,向四周分散,进而能够将镜头上的灰尘吹动,实现预清洁的作用,而继续气流进入气流导向座972内的气流使得气流导向座972内的气压上升,气流导向座972内的膨胀膜973膨胀,这样膨胀膜973的表面与镜头的凸面接触,在接触时,使得膨胀膜973能够适应镜头弧度,进而能够完全与镜头接触,由于设置有十字清洁条975在膨胀膜973膨胀时,十字清洁条975首先与镜头表面接触,这样接触面成线状,而且镜头清洁部分97为转动的状态,这样能够首先被十字清洁条975刮除,进而能够将附着的灰尘刮除,由于膨胀膜973适应镜头弧度时,十字清洁条975也会完全与镜头表面接触,接触面积小,转动时产生的摩擦小,这样能够在保护镜头的同时,实现对镜头的灰尘清除,微气孔974起到释放气压的作用,使得膨胀膜973接触镜头时,不会产生过大的压力,这样能够起到整体清洁的作用,而且能够增加摄像头的使用寿命,导流片976的设置,导流片976多个对向第一分流口915的位置,这样第一分流口915进入气流可使得导流片976带动气流导向座972转动。
69.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
70.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。