1.本发明涉及移动定位领域,具体地讲,涉及一种基于卡尔曼滤波器的移动场景超分辨定位方法。
背景技术:
2.随着高新科学技术的蓬勃发展,移动定位技术受到越来越多的关注,目前移动场景定位物体大多采用调频连续波雷达(fmcw),即选择发射频率线性增长的信号波,并接收反射回来的信号波,通过对所接收的信号进行处理以达到定位物体的目的。
3.随着科技的发展,人们对定位技术的需求变得越来越强烈,移动定位技术具有十分广阔的应用和市场。移动定位技术目前主要采用基线算法,但其得到的分辨较低,不能满足日益增长的超分辨定位需求,亟需要设计相应算法来提高定位分辨率。
4.综上考虑,对移动场景定位问题的研究有着十分重要的现实意义。
技术实现要素:
5.本发明要解决的技术问题是提供一种基于卡尔曼滤波器的移动场景超分辨定位方法,方便移动定位。
6.本发明采用如下技术方案实现发明目的:一种基于卡尔曼滤波器的移动场景超分辨定位方法,其特征在于,本发明包括以下步骤:步骤1:建立坐标系表示各物体和天线坐标;步骤2:建立中频信号与物体位置之间的关系;步骤3:在一个chirp周期内建立中频总信号与物体位置之间的关系;步骤4:建立物体运动学模型;步骤5:仿真实验。
7.作为本技术方案的进一步限定,所述步骤1的具体流程为:为了简化,考虑平面二维场景,在水平面上,假设等效虚拟天线阵列由个孔径为的天线均匀排布,以天线阵列中心为原点,天线阵列为轴,垂直于天线阵列为轴建立坐标系;记物体的坐标为,其中,,;为物体与轴的夹角;第根天线的坐标为,其中,,;第根天线的与物体间的距离为;
第根天线的双程回波距离为;表示物体与天线阵列中心的距离。
8.作为本技术方案的进一步限定,所述步骤2的具体流程为:对于回波距离的物体,在任意时刻,对时刻做均匀采样,得到第根天线接收到是中频信号为:到是中频信号为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1);其中:表示物体的反射性;表示chirp周期;表示虚数单位;表示调频斜率;表示采样间隔;表示载频;为天线与物体之间的距离;表示接收时延;表示光速;表示向下取整。
9.作为本技术方案的进一步限定,所述步骤3的具体流程为:在一个chirp周期内的时刻,第根天线接收的总中频信号是由个目标物体带噪声中频信号的混合,即:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);其中:表示噪声;建立物体定位模型,如下所示:
。
10.作为本技术方案的进一步限定,所述步骤4的具体流程为:以相邻两个chirp周期,建立物体运动学模型,第根天线上在第、个chirp周期内所采集的中频信号分别为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)一个chirp周期之间的时间间隔,假设物体在一个相邻周期内作匀速运动,速度记为,则:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)其中:表示物体在第个与个chirp周期间的距离;在任意时刻可建立以下运动学模型为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)其中:;建立移动场景物体定位模型,如下所示:
。
11.与现有技术相比,本发明的优点和积极效果是:1、在实际场景中,为实现移动物体超分辨率定位,需要考虑噪声对定位的影响,若要实现精准定位,则需降噪效果好的算法来对中频信号进行降噪处理。同时,也需要考虑天线本身存在系统误差的情况,如阵列老化等现象。本发明采用伪卡尔曼滤波算法实现对物体轨迹的实时配准,提高定位算法的稳定性,改进定位算法的鲁棒性。为实现移动场景高分辨定位物体,使用matlab软件进行仿真。
12.2、本发明给出一种合理的运动模型以实现在移动场景下定位物体,该方法通过对信号进行降噪处理和对系统偏差实时配准,可实现物体的超分辨率精确定位,研究移动场景超分辨定位问题具有重要现实意义。
附图说明
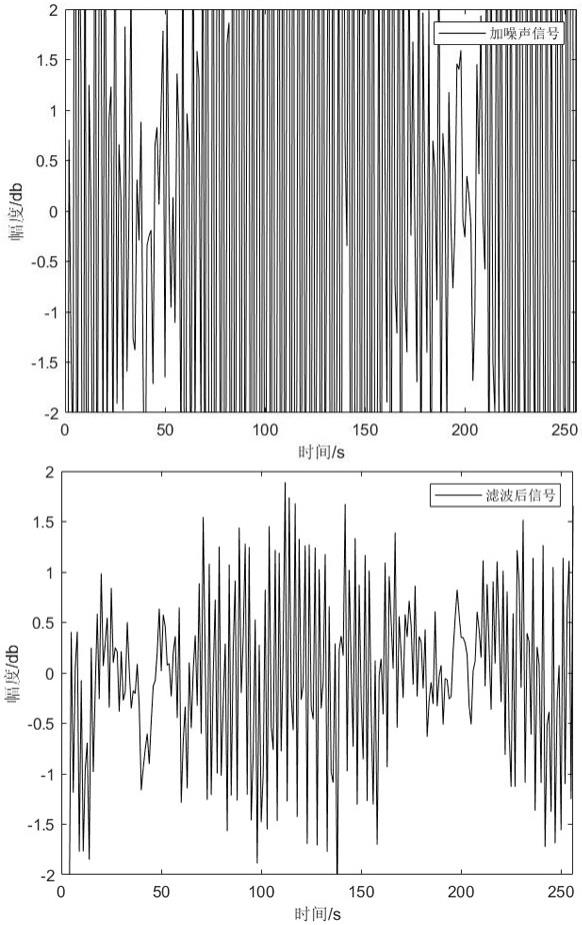
13.图1为本发明的物体轨迹处理前后对比图。
14.图2为本发明的天线运动轨迹。
具体实施方式
15.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
16.如图1-图2所示,本发明包括以下步骤:步骤1:建立坐标系表示各物体和天线坐标;步骤2:建立中频信号与物体位置之间的关系;步骤3:在一个chirp周期内建立中频总信号与物体位置之间的关系;步骤4:建立物体运动学模型;步骤5:仿真实验。
17.所述步骤1的具体流程为:为了简化,考虑平面二维场景,在水平面上,假设等效虚拟天线阵列由个孔径为的天线均匀排布,以天线阵列中心为原点,天线阵列为轴,垂直于天线阵列为轴建立坐标系;记物体的坐标为,其中,,;为物体
与轴的夹角;第根天线的坐标为,其中,,;第根天线的与物体间的距离为;第根天线的双程回波距离为;表示物体与天线阵列中心的距离。
18.所述步骤2的具体流程为:对于回波距离的物体,在任意时刻,对时刻做均匀采样,得到第根天线接收到是中频信号为:到是中频信号为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1);其中:表示物体的反射性;表示chirp周期;表示虚数单位;表示调频斜率;表示采样间隔;表示载频;为天线与物体之间的距离;表示接收时延;表示光速;表示向下取整。
19.所述步骤3的具体流程为:在一个chirp周期内的时刻,第根天线接收的总中频信号是由个目标物体带噪声中频信号的混合,即:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);其中:表示噪声;
建立物体定位模型,如下所示:。
20.所述步骤4的具体流程为:以相邻两个chirp周期,建立物体运动学模型,第根天线上在第、个chirp周期内所采集的中频信号分别为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)一个chirp周期之间的时间间隔,假设物体在一个相邻周期内作匀速运动,速度记为,则:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)其中:表示物体在第个与个chirp周期间的距离;在任意时刻可建立以下运动学模型为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)其中:;建立移动场景物体定位模型,如下所示:
。
21.本发明的工作流程为:建立坐标系表示各物体和天线坐标。
22.在水平面上,假设等效虚拟天线阵列由个孔径为的天线均匀排布,以天线阵列中心为原点,天线阵列为轴,垂直于天线阵列为轴建立坐标系。
23.记物体的坐标为,第根天线的坐标为,第根天线与物体间的距离为,第根天线的双程回波距离为。
24.已知参数如下:,米。
25.建立中频信号与物体位置之间的关系。
26.对于任意时刻,得到第根天线接收到是中频信号为,。
27.其中:参数秒,赫兹/秒,赫兹,秒。
28.在一个chirp周期内建立中频总信号与物体位置之间的关系。
29.在任意时刻,第根天线接收的总中频信号为,。
30.建立物体定位模型,如下所示:
。
31.建立物体运动学模型。
32.在相邻两个chirp周期,建立移动场景物体运动学模型如下所示。
33.仿真实验。
34.为实现移动物体超分辨率定位,使用matlab软件进行仿真,过程如下:(1)处理噪声。考虑高斯噪声干扰信号情形,对输入的样本利用k均值法对样本聚类进行预处理,借助压缩感知算法对目标信号进行稀疏重构,得到正确的模型参数;由卡尔曼滤波器递推模型,对中频信号进行降噪处理。
35.(2)借助超大型天线阵列的分组和控制技术,将天线阵列划分为多个组别,建立基于newton迭代算法和超大规模多输入多输出技术的检测算法,降低算法复杂度,实现利用一帧中频信号来超分辨定位物体。
36.(3)处理系统误差。首先利用状态变量法,建立了目标运动的动态模型和动态时变演化形式的系统偏差模型。然后利用最小二乘法,用最优形式来表示观测值与时间之间的关系,处理系统偏差配准问题。
37.(4)采用伪卡尔曼滤波算法实现对物体轨迹的实时配准,提高定位算法的稳定性,改进定位算法的鲁棒性,实现移动场景超分辨定位物体。
38.处理前后对比图如图1所示(以第1根天线为例),可得该方法具有良好的改进效果。
39.本文使用matlab进行编程处理,得到每根天线的运动轨迹,如下列图2所示(以第1根天线为例),由此可得不同时刻物体的坐标。
40.以上公开的仅为本发明的具体实施例,但是,本发明并非局限于此,任何本领域的
技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。