1.本实用新型涉及自动化领域,尤其是涉及一种机器人。
背景技术:
2.现有的机器人在手臂端往往设有取放料机构,而取放料机构往往只设置一个夹爪或者吸盘,每次只能取放一个物料,效率低。另外,即使取放料机构设有多个夹爪或者吸盘,但是各夹爪或者吸盘或无法进行独立自转,或结构/控制方案复杂等,有待进一步优化。
3.另外,现有的机器人取放料效率、运动的灵活性和结构紧凑度等有待进一步改进。
技术实现要素:
4.本实用新型的主要目的是为了克服现有技术的部分不足,提供一种机器人。
5.本实用新型的机器人,其特征在于:包括底座、第一旋转关节模组、第二旋转关节模组、第一摆臂、第三旋转关节模组和第二摆臂,其中所述第一旋转关节模组设于底座和第二旋转关节模组之间,所述第一旋转关节模组和所述第二旋转关节模组的旋转轴互相垂直,所述第一摆臂的一端和第二旋转关节模组可转动连接,所述第一摆臂的另一端通过第三旋转关节模组和所述第二摆臂可转动连接。
6.优选地,所述机器人还包括转塔机构,所述转塔机构设于所述第二摆臂远离所述第三旋转关节模组的一端。
7.优选地,所述转塔机构上设有若干取料头。
8.优选地,所述第一旋转关节模组包括带减速器的旋转机构和回转支架,所述回转支架具有横向部和纵向部,所述回转支架的横向部和纵向部整体呈倒l形,所述带减速器的旋转机构固定连接于所述横向部,所述第一旋转关节模组设于所述纵向部,所述第一旋转关节模组的旋转轴垂直所述纵向部。
9.优选地,所述第一摆臂的长度l小于所述底座和回转支架的高度之和h。
10.优选地,所述第三旋转关节模组的转轴和所述第二旋转关节模组的转轴平行设置。
11.优选地,所述转塔机构包括转塔座、转塔旋转组件、取料头旋转组件和若干取料头,若干所述取料头设于转塔座上,所述转塔旋转组件驱动所述转塔座旋转以切换所述取料头,所述取料头旋转组件驱动各所述取料头的旋转。
12.优选地,所述取料头旋转组件包括取料头驱动同步轮、取料头驱动轴、驱动锥齿轮、子锥齿轮和取料头自转轴,所述取料头驱动同步轮设于所述取料头驱动轴的一端,所述取料头驱动轴的另一端设有所述驱动锥齿轮;每个所述取料头对应设有一所述取料头自转轴,所述取料头自转轴一端和所述取料头连接,另一端设有所述子锥齿轮;各所述子锥齿轮分别与所述驱动锥齿轮齿合连接。
13.优选地,所述第二摆臂还设有第一电机和第二电机,所述第一电机和第二电机分别通过对应同步带驱动所述取料头驱动同步轮和所述转塔驱动同步轮旋转。
14.本实用新型的有益效果将结合具体实施方式进行描述。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
16.图1为转塔机构的某视角的结构示意图;
17.图2为图1的a-a处剖视图;
18.图3为图1中转塔机构的立体结构示意图;
19.图4为转塔机构为不同形状和取料头设置的示意图;
20.图5为机器人的整体结构示意图;
21.图6为图5中某视角的平面示意图之一;
22.图7为图5中某视角的平面示意图之二;
23.图8为图5中的局部结构示意图。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后等
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
26.另外,在本实用新型中仅对涉及到技术问题解决的结构、组成方案进行描述时候,对于公知的必要的结构、零件和连接关系,或者结合附图和公知常识可确定的技术特征,下面虽然没有描述,但不等于技术方案里不存在,更不应该成为公开不充分理由。
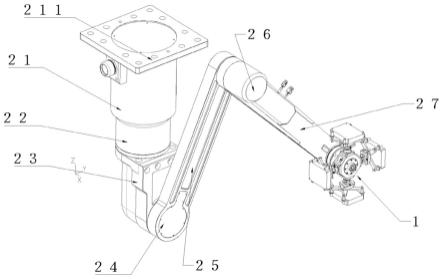
27.参考图5至8,某优选实施例中,机器人包括:
28.底座21和底座固定板211,底座21通过底座固定板211与其它设备或装置固定连接。
29.第一旋转关节模组22,第一旋转关节模组22包括带减速器的旋转机构221、减速器固定环222和回转支架23,带减速器的旋转机构221设于底座21和回转支架23之间,回转支架23能够在带减速器的旋转机构221作用下于底座21做旋转运动。具体来说,带减速器的旋转机构221的减速器可通过减速器固定环222与回转支架23固定连接。带减速器的旋转机构221可以是减速器和电机通过法兰连接形成,也可以是自带减速器的电机或者减速电机等。
30.回转支架23,回转支架23具有横向部和纵向部,优选地回转支架23的横向部和纵向部整体呈倒l形。减速器通过减速器固定环222与回转支架23的横向部固定连接。第一旋转关节模组22的旋转轴垂直纵向部。
31.第二旋转关节模组24和第一摆臂25,第一摆臂25通过第二旋转关节模组24和回转
支架23纵向部可转动连接。第一摆臂25在第二旋转关节模组24驱动控制下相对回转支架23纵向部转动。优选地,第二旋转关节模组24的旋转轴垂直纵向部。
32.优选地,所述第一摆臂25的长度l小于所述底座21和回转支架23的高度之和h。这样由于第一摆臂25与底座21之间的距离较小,可节省空间,同时第一摆臂25的长度l小于所述底座21和回转支架23的高度之和h,第一摆臂25可以左右自由旋转不受底座阻碍,摆臂灵活性和空间活动自由度得以提高。
33.第三旋转关节模组26和第二摆臂27,在第一摆臂25远离第二旋转关节模组24的一端通过第三旋转关节模组26与第二摆臂27相连接。第三旋转关节模组26的转轴和第二旋转关节模组24的转轴平行设置。通过第三旋转关节模组26,第二摆臂27能够在第一摆臂25进行旋转。第二摆臂27远离第三旋转关节模组26的一端设有转塔机构1。转塔机构1能够在第二摆臂27上转动。优选地,所述转塔机构1的旋转轴和第三旋转关节模组26平行。
34.转塔机构1上设有至少两个以上夹爪,或者两个以上真空吸头,或者真空一个以上吸头和一个以上夹爪的组合。转塔机构1的旋转,可以切换不同的夹爪或吸头去拾取物料对多组产品快速取放切换,减少机器人运动频率,提高设备取放料周转时间,大大提高设备生产效率。广泛应用于各类组装,检测设备的产品或治具快速取放料切换。
35.工作时,机器人首先可以通过第一旋转关节模组22,使由第一摆臂25和第二摆臂27以及转塔机构1构成的整体可以绕z轴做360度旋转,以调节机器人在xy平面的方位。另外,由于第二旋转关节模组24和第三旋转关节模组26的旋转轴平行,第二旋转关节模组24可以驱动第一摆臂25和第二摆臂27以及转塔机构1构成的整体在与xy平面垂直的任一对应的平面上进行转动以调节在该平面的方位。而通过第三旋转关节模组26可驱动第二摆臂27以及转塔机构1构成的整体在该平面上进一步转动,以调节第二摆臂27和第一摆臂25的夹角,以及第二摆臂27和第一摆臂25共同向外伸出的总长度。最后,通过转塔机构1的旋转,可以切换不同的夹爪或吸头去拾取物料对多组产品快速取放切换,减少机器人运动频率,提高设备取放料周转时间,大大提高设备生产效率。
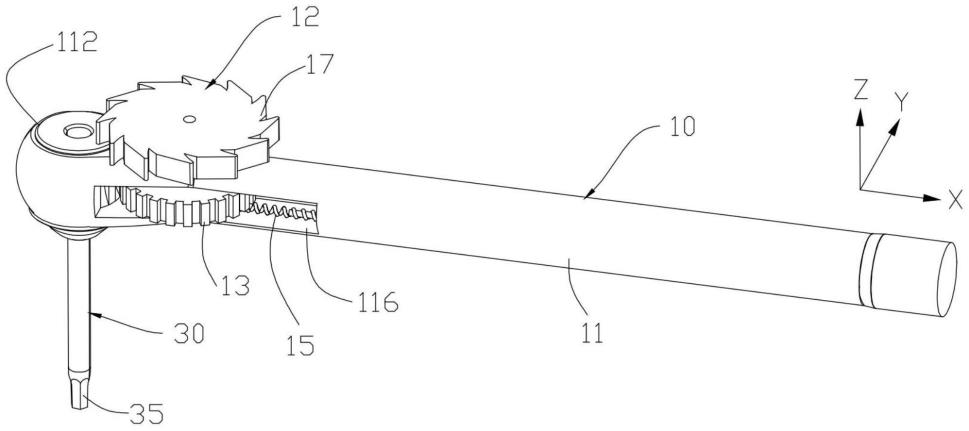
36.参考图1至3,某优选实施例中,转塔机构1包括:
37.转塔座11,转塔座11具有基板111和若干侧板112。
38.转塔旋转组件,用于驱动转塔整体的旋转,以切换不同的取料头14去拾取物料。
39.若干取料头14,各取料头14分别设置在转塔座11对应的侧板112。
40.取料头旋转组件,用于驱动各取料头14的旋转。
41.取料头旋转组件包括取料头驱动同步轮121、取料头驱动轴122、驱动锥齿轮123、子锥齿轮124、取料头自转轴125等。其中,取料头驱动同步轮121设于取料头驱动轴122的一端,取料头驱动同步轮121通过第一电机和对应同步带驱动旋转。取料头驱动轴122的另一端设有驱动锥齿轮123,即大锥齿轮。每个取料头14对应设有一取料头自转轴125,取料头自转轴125一端和取料头14连接,另一端设有子锥齿轮124,即小锥齿轮。子锥齿轮124和驱动锥齿轮123齿合连接。优选地,取料头驱动轴122一端穿过所述转塔座11的基板111到达转塔座11的内部,所述驱动锥齿轮123内置于转塔座11内部,所述子锥齿轮124和驱动锥齿轮123于转塔座11内部齿合连接。这样,转塔机构1结构整体紧凑,取料头驱动同步轮121的旋转使取料头驱动轴122的驱动锥齿轮123旋转,进而通过驱动锥齿轮123带动若干子锥齿轮124同步旋转。子锥齿轮124的旋转又分别带动对应的取料头自转轴125旋转,进而使取料头14旋
转。优选地,取料头自转轴125和取料头驱动轴122互相垂直。
42.取料头14可以是真空吸头144,或者夹爪,其中当取料头14为夹爪时,每个夹爪设有手指气缸142、进气组件141和夹头143。进气组件141包括进气嘴、密封圈、进气滑环、气管等构成,最终通过进气组件141气动控制手指气缸142的开合,进而通过手指气缸142驱动夹头143的开合以实现取放料。当取料头14为真空吸头144,则包括吸盘和进气组件141,通过进气组件141实现吸盘的真空吸附控制以实现取放料。
43.转塔机构1的取料头14可以全部为夹爪,或者真空吸头144,或者部分为夹爪,部分为真空吸头144,以满足多样化的取放料需求。
44.转塔旋转组件包括转塔驱动同步轮131、转塔驱动轴132和减速器133等。其中转塔驱动同步轮131通过第二电机和对应同步带驱动旋转,转塔驱动同步轮131驱动转塔驱动轴132旋转,并通过减速器133以实现减速、或增大扭矩或减小运动惯量。优选地,取料头旋转组件的取料头驱动同步轮121和转塔旋转组件的转塔驱动同步轮131同轴设置。这样,转塔机构1结构紧凑精度高;通过驱动锥齿轮123传动,由一个动力同时驱动多个取料头14同时旋转,结构紧凑平稳,承载能力较高,可灵活变换多头数量,降低硬件成本。每个取料头14采用模块化设计,内部采用进气滑环通气等进气组件141,结构紧凑灵活,可通正气压或负压,头部可接吸盘或夹爪拾取物料。
45.参考图4,根据具体实施需要,如图4的a和c ,转塔座11的基板111可以呈八边形,即转塔座11对应有8个侧板112。每其中相间隔的4个侧板112分别设有一个取料头14,即共4个取料头14。4个取料头14中,可以如a所示,两个为夹爪,两个为真空吸头144,也可以如c所示,全部为夹爪。如图4的b,转塔座11的基板111可以呈六边形,即转塔座11对应有6个侧板112。每其中相间隔的3个侧板112分别设有一个取料头14,即共3个取料头14,同样,3个取料头14可以为真空吸头144或者夹爪,或者部分为真空吸头144,部分为夹爪。如图4的d,转塔座11的基板111可以呈五边形,即转塔座11对应有5个侧板112。每其中每个侧板112分别设有一个取料头14,即共5个取料头14,5个取料头14可以为真空吸头144或者夹爪,或者部分为真空吸头144,部分为夹爪。如图4的e,转塔座11的基板111可以呈六边形,即转塔座11对应有6个侧板112。每其中每个侧板112分别设有一个取料头14,即共6个取料头14,6个取料头14可以为真空吸头144或者夹爪,或者部分为真空吸头144,部分为夹爪。这样,一个动力同时驱动多头同时旋转,结构紧凑平稳,承载能力较高,可灵活变换多头数量,降低硬件成本,并且取料头14可接吸盘或夹爪,或者它们的组合,以拾取物料,能够满足多种多样的取放料需求。
46.某优选实施例中,第一电机和第二电机设于第二摆臂27上。
47.如上所述机器人,采用平行折叠机械臂设计,机械手运动灵活,结构紧凑,节省占用空间;摆臂结构设计可使机械手用最快最简单的运动轨迹到达目标位置,节省循环时间;并且多头转塔取放料结构,可实现对多组产品快速取放切换,减少机器人运动频率,提高设备取放料周转时间,大大提高设备生产效率。广泛应用于各类组装,检测设备的产品或治具快速取放料切换。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。