1.本发明涉及环状体、波动减速器、机器人以及扭矩检测装置。
背景技术:
2.近年来,搭载于机器人的关节等的波动减速器的需求正在提高。在以往的波动减速器中,在以减速后的转速进行旋转的外齿齿轮粘贴有应变仪。由此,能够检测施加于外齿齿轮的扭矩(日本公开公报特开2000-131160号公报)。
3.然而,在以往的构造中,在应变仪的输出信号大幅变化的情况下,无法区分该输出信号的变化是由于施加了较大的扭矩而引起的,还是由于应变仪的电阻线发生异常而引起的。
技术实现要素:
4.本发明的目的在于提供一种利用电阻线来检测施加于环状体的扭矩,并且能够诊断电阻线的状态的技术。
5.本发明的例示性的实施方式为环状体,其具有:基座部,其包围中心轴线,沿与所述中心轴线交叉的方向扩展;以及电阻线,其配置于所述基座部,所述电阻线具有:第1电阻线部;以及第2电阻线部,其配置于比所述第1电阻线部靠径向外侧的位置,所述第1电阻线部具有:内侧第1电阻线部;以及外侧第1电阻线部,其配置于比所述内侧第1电阻线部靠径向外侧的位置,所述第2电阻线部具有:内侧第2电阻线部;以及外侧第2电阻线部,其配置于比所述内侧第2电阻线部靠径向外侧的位置,所述内侧第1电阻线部和所述外侧第1电阻线部分别具有在周向上隔开间隔地配置的多个第1区域,所述多个第1区域分别包含沿具有径向和周向双方的成分的方向延伸的第1部位在周向上重复配置的区域,所述内侧第2电阻线部和所述外侧第2电阻线部分别具有在周向上隔开间隔地配置的多个第2区域,所述多个第2区域分别包含沿具有径向和周向双方的成分的方向延伸的第2部位在周向上重复配置的区域。
6.本发明的另一例示性的实施方式为波动减速器,其具有上述环状体、波动发生器以及内齿齿轮,所述环状体具有:筒状的体部,其从所述基座部的径向端部沿轴向延伸;以及多个外齿,该多个外齿从所述体部的径向外侧面向径向外方突出,所述波动发生器配置于所述外齿的径向内侧,所述内齿齿轮配置于所述外齿的径向外侧,所述内齿齿轮具有从径向内侧面向径向内方突出的多个内齿,所述多个外齿的一部分与所述多个内齿的一部分啮合。
7.本发明的另一例示性的实施方式为机器人,其具有上述波动减速器。
8.本发明的另一例示性的实施方式为扭矩检测装置,其具有:电阻线,其相对于中心轴线沿周向配置;以及检测电路,其与所述电阻线电连接,所述电阻线具有:第1电阻线部;以及第2电阻线部,其配置于比所述第1电阻线部靠径向外侧的位置,所述第1电阻线部具有:内侧第1电阻线部;以及外侧第1电阻线部,其配置于比所述内侧第1电阻线部靠径向外
侧的位置,所述第2电阻线部具有:内侧第2电阻线部;以及外侧第2电阻线部,其配置于比所述内侧第2电阻线部靠径向外侧的位置,所述内侧第1电阻线部和所述外侧第1电阻线部分别具有在周向上隔开间隔地配置的多个第1区域,所述多个第1区域分别包含沿具有径向和周向双方的成分的方向延伸的第1部位在周向上重复配置的区域,所述内侧第2电阻线部和所述外侧第2电阻线部分别具有在周向上隔开间隔地配置的多个第2区域,所述多个第2区域分别包含沿具有径向和周向双方的成分的方向延伸的第2部位在周向上重复配置的区域,所述第1电阻线部还具有与多个所述第1区域连接的第1连接区域,多个所述第1区域经由所述第1连接区域而连接,由此形成第1桥式电路,所述第2电阻线部还具有与多个所述第2区域连接的第2连接区域,多个所述第2区域经由所述第2连接区域而连接,由此形成第2桥式电路,所述第1部位和所述第2部位的电阻值根据施加于配置有所述电阻线的区域的扭矩而变化,所述检测电路通过将第1桥式电路的输出信号与第2桥式电路的输出信号进行比较,输出表示所述电阻线的状态的诊断信号。
9.根据本发明的例示性的实施方式,能够利用第1电阻线部和第2电阻线部来检测施加于环状体的扭矩。另外,通过将第1电阻线部的输出信号与第2电阻线部的输出信号进行比较,能够诊断电阻线的状态。并且,能够实现能够检测施加于环状体的扭矩的波动减速器和机器人。
10.由以下的本发明优选实施方式的详细说明,参照附图,可以更清楚地理解本发明的上述及其他特征、要素、步骤、特点和优点。
附图说明
11.图1是机器人的概要图。
12.图2是波动减速器的纵剖视图。
13.图3是波动减速器的横剖视图。
14.图4是环状体的局部纵剖视图。
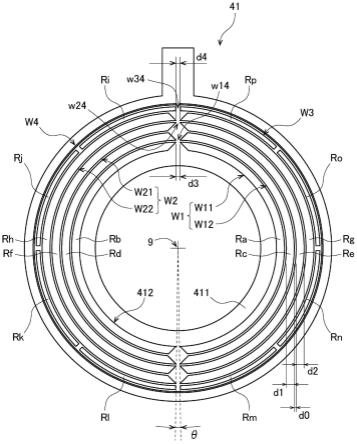
15.图5是基板的俯视图。
16.图6是基板的局部俯视图。
17.图7是第1桥式电路的电路图。
18.图8是第2桥式电路的电路图。
19.图9是示出诊断处理的流程的流程图。
20.图10是示出第1电阻线部的波动误差和第2电阻线部的波动误差的时间变化的曲线图。
21.图11是第3桥式电路的电路图。
22.图12是第4桥式电路的电路图。
23.图13是示出第3桥式电路的测量值和第4桥式电路的测量值的曲线图。
24.图14是第2实施方式的基板的俯视图。
25.图15是示出第2实施方式的第1电阻线部的波动误差和第2电阻线部的波动误差的时间变化的曲线图。
具体实施方式
26.以下,参照附图对本发明的例示性的实施方式进行说明。
27.图1是搭载了一个实施方式的波动减速器1的机器人100的概要图。机器人100例如是在工业产品的生产线上进行部件的搬运、加工、组装等作业的、所谓的产业用机器人。如图1所示,机器人100具有基架101、臂102、马达103以及波动减速器1。
28.臂102被支承为能够相对于基架101转动。马达103和波动减速器1组装在基架101与臂102之间的关节部上。当向马达103提供驱动电流时,从马达103输出旋转运动。另外,从马达103输出的旋转运动被波动减速器1减速,并向臂102传递。由此,臂102相对于基架101以减速后的速度进行转动。
29.如上所述,机器人100具有波动减速器1。如后所述,波动减速器1具有利用电阻线来检测扭矩的功能。另外,波动减速器1具有诊断该电阻线的状态的功能。由此,能够实现高功能的机器人100。
30.接着,对波动减速器1的详细的构造进行说明。
31.另外,以下,将与波动减速器1的中心轴线9平行的方向称为“轴向”,将与波动减速器1的中心轴线9垂直的方向称为“径向”,将沿着以波动减速器1的中心轴线9为中心的圆弧的方向称为“周向”。但是,上述“平行的方向”也包含大致平行的方向。另外,上述“垂直的方向”也包含大致垂直的方向。
32.图2是一个实施方式的波动减速器1的纵剖视图。图3是从图2的a-a位置观察的波动减速器1的横剖视图。为了避免图的复杂化,在图3中,省略了表示剖面的剖面线。波动减速器1是将从马达103得到的第1转速的旋转运动减速为比第1转速低的第2转速的装置。如图1和图2所示,本实施方式的波动减速器1具有内齿齿轮10、环状体20以及波动发生器30。如后所述,环状体20具有利用电阻线来检测扭矩的功能。另外,环状体20具有诊断电阻线的状态的功能。由此,能够实现高功能的波动减速器1。
33.即,在波动减速器1中,能够检测施加于环状体20的扭矩,并且能够诊断配置于环状体20的电阻线的状态。更具体而言,能够诊断电阻线是否正常地发挥功能。在本实施方式中,环状体20是具有挠性的外齿齿轮。但是,环状体也可以是外齿齿轮以外的其他部件。
34.内齿齿轮10是以中心轴线9为中心的圆环状的齿轮。内齿齿轮10固定于基架101。内齿齿轮10与中心轴线9同轴地配置。另外,内齿齿轮10配置于后述的外齿22的径向外侧。内齿齿轮10的刚性远高于环状体20的后述的体部21的刚性。因此,内齿齿轮10实质上可以被视为刚体。内齿齿轮10具有多个内齿11。多个内齿11从内齿齿轮10的径向内侧面向径向内方突出。多个内齿11在内齿齿轮10的内周面沿周向以一定的间距排列。
35.环状体20是能够挠曲变形的环状的齿轮。环状体20固定于臂102。环状体20被支承为能够以中心轴线9为中心进行旋转。
36.如图2和图3所示,环状体20具有体部21和多个外齿22。另外,环状体20还具有环状板部23。
37.体部21是从后述的基座部231的径向端部沿轴向延伸的筒状的部分。在本实施方式中,体部21从基座部231的径向内端部朝向轴向一侧延伸。体部21的轴向一侧的端部位于波动发生器30的径向外侧并且位于内齿齿轮10的径向内侧。体部21具有挠性,因此能够在径向上变形。尤其是,体部21的轴向一端能够比其他部分更大幅地在径向上位移。
38.多个外齿22从体部21的径向外侧面向径向外方突出。多个外齿22配置于体部21的轴向一端的径向外侧面。多个外齿22沿周向以一定的间距排列。多个外齿22的一部分与上述多个内齿11的一部分相互啮合。内齿齿轮10所具有的内齿11的数量与环状体20所具有的外齿22的数量稍有不同。
39.环状板部23具有基座部231和厚壁部232。即,环状体20具有基座部231。基座部231包围中心轴线9,沿与中心轴线9交叉的方向扩展。基座部231优选沿着与中心轴线9垂直的面扩展。基座部231从体部21的轴向另一侧的端部朝向径向外侧扩展。另外,基座部231呈包围中心轴线9的环状。基座部231呈薄壁状,因此能够稍微挠曲变形。
40.厚壁部232是位于基座部231的径向外侧的圆环状的部分。厚壁部232从基座部231的径向外侧的端部进一步向径向外方扩展。厚壁部232的轴向的厚度比基座部231的轴向的厚度大。厚壁部232例如通过螺栓而固定于臂102。
41.波动发生器30是使体部21产生周期性的挠曲变形的机构。波动发生器30配置于外齿22的径向内方。本实施方式的波动发生器30具有凸轮31和挠性轴承32。凸轮31被支承为能够以中心轴线9为中心进行旋转。凸轮31的径向外侧面在沿轴向观察时为椭圆形。挠性轴承32是能够挠曲变形的轴承。挠性轴承32配置在凸轮31的径向外侧面与环状体20的体部21的径向内侧面之间。因此,凸轮31和体部21能够以不同的转速进行旋转。
42.挠性轴承32的内圈与凸轮31的径向外侧面接触。挠性轴承32的外圈与体部21的径向内侧面接触。因此,体部21变形为沿着凸轮31的径向外侧面的椭圆形状。其结果为,在相当于该椭圆的长轴的两端的两个部位,环状体20的外齿22与内齿齿轮10的内齿11啮合。在周向的其他位置,外齿22与内齿11不啮合。
43.凸轮31与马达103的输出轴(省略图示)连接。当驱动马达103时,凸轮31以中心轴线9为中心以第1转速进行旋转。由此,环状体20的上述椭圆的长轴也以第1转速进行旋转。于是,外齿22与内齿11的啮合位置也沿周向以第1转速变化。另外,如上所述,内齿齿轮10的内齿11的数量与环状体20的外齿22的数量稍有不同。由于该齿数之差,凸轮31每旋转一周,外齿22与内齿11的啮合位置在周向上稍微变化。其结果为,环状体20相对于内齿齿轮10以中心轴线9为中心以比第1转速低的第2转速进行旋转。
44.接着,对扭矩检测装置40进行说明。扭矩检测装置40是用于检测施加于环状体20的扭矩的传感器。如图2所示,扭矩检测装置40具有基板41和检测电路42。基板41配置于环状体20的基座部231。具体而言,基座部231具有与中心轴线9交叉且以中心轴线9为中心呈圆环状扩展的表面234。表面234是基座部231的轴向另一侧的面。基板41固定于基座部231的该表面234。
45.图4是基板41的附近的环状体20的局部纵剖视图。图5是基板41的俯视图。如图4和图5所示,基板41具有绝缘层411和电阻线412。即,扭矩检测装置40具有电阻线412和检测电路42。
46.绝缘层411能够柔软地变形。绝缘层411沿与中心轴线9交叉的方向扩展。另外,绝缘层411呈以中心轴线9为中心的圆环状。绝缘层411由作为绝缘体的树脂或无机绝缘材料构成。绝缘层411配置于基座部231的表面234。
47.电阻线412形成于绝缘层411的表面。即,电阻线412配置于基座部231。电阻线412的材料使用作为导体的金属。电阻线412的材料例如使用铜合金、铬合金或铜。电阻线412相
对于中心轴线9沿周向配置。另外,电阻线412具有第1电阻线部w1和第2电阻线部w2。第2电阻线部w2配置于比第1电阻线部w1靠径向外侧的位置。
48.第1电阻线部w1具有内侧第1电阻线部w11和外侧第1电阻线部w12。外侧第1电阻线部w12配置于比内侧第1电阻线部w11靠径向外侧的位置。
49.内侧第1电阻线部w11具有多个第1区域ra、rb。多个第1区域ra、rb在周向上隔开间隔地配置。在本实施方式中,内侧第1电阻线部w11具有两个第1区域ra、rb。两个第1区域ra、rb分别在以中心轴线9为中心的约180
°
的范围内呈半圆弧状设置。两个第1区域ra、rb同心且线对称地配置。另外,从中心轴线9到第1区域ra的径向的距离与从中心轴线9到第1区域rb的径向的距离大致相同。
50.图6是基板41的局部俯视图。如图6所示,多个第1区域ra、rb分别包含沿具有径向和周向双方的成分的方向延伸的第1部位r1在周向上重复配置的区域。具体而言,两个第1区域ra、rb分别是一根导线一边呈锯齿状弯折一边沿周向延伸而成的。多个第1部位r1以相互大致平行的姿势沿周向排列。两个第1区域ra、rb中的一方的第1区域ra的第1部位r1相对于径向而向周向一侧倾斜。另一方的第1区域rb的第1部位r1相对于径向而向周向另一侧倾斜。第1部位r1相对于径向的倾斜角度例如为45
°
。在周向上相邻的第1部位r1的端部彼此在径向内侧或径向外侧交替地连接。由此,多个第1部位r1整体上串联连接。
51.外侧第1电阻线部w12具有多个第1区域rc、rd。多个第1区域rc、rd在周向上隔开间隔地配置。在本实施方式中,外侧第1电阻线部w12具有两个第1区域rc、rd。两个第1区域rc、rd分别在以中心轴线9为中心的约180
°
的范围内呈半圆弧状设置。两个第1区域rc、rd同心且线对称地配置。另外,从中心轴线9到第1区域rc的径向的距离与从中心轴线9到第1区域rd的径向的距离大致相同。
52.如图6所示,多个第1区域rc、rd分别包含沿具有径向和周向双方的成分的方向延伸的第1部位r1在周向上重复配置的区域。具体而言,两个第1区域rc、rd分别是一根导线一边呈锯齿状弯折一边沿周向延伸而成的。多个第1部位r1以相互大致平行的姿势沿周向排列。两个第1区域rc、rd中的一方的第1区域rc的第1部位r1相对于径向而向周向另一侧倾斜。另一方的第1区域rd的第1部位r1相对于径向而向周向一侧倾斜。第1部位r1相对于径向的倾斜角度例如为45
°
。在周向上相邻的第1部位r1的端部彼此在径向内侧或径向外侧交替地连接。由此,多个第1部位r1整体上串联连接。
53.第2电阻线部w2具有内侧第2电阻线部w21和外侧第2电阻线部w22。外侧第2电阻线部w22配置于比内侧第2电阻线部w21靠径向外侧的位置。
54.内侧第2电阻线部w21具有多个第2区域re、rf。多个第2区域re、rf在周向上隔开间隔地配置。在本实施方式中,内侧第2电阻线部w21具有两个第2区域re、rf。两个第2区域re、rf分别在以中心轴线9为中心的约180
°
的范围内呈半圆弧状设置。两个第2区域re、rf同心且线对称地配置。另外,从中心轴线9到第2区域re的径向的距离与从中心轴线9到第2区域rf的径向的距离大致相同。
55.如图6所示,多个第2区域re、rf分别包含沿具有径向和周向双方的成分的方向延伸的第2部位r2在周向上重复配置的区域。具体而言,两个第2区域re、rf分别是一根导线一边呈锯齿状弯折一边沿周向延伸而成的。多个第2部位r2以相互大致平行的姿势沿周向排列。两个第2区域re、rf中的一方的第2区域re的第2部位r2相对于径向而向周向一侧倾斜。
另一方的第2区域rf的第2部位r2相对于径向而向周向另一侧倾斜。第2部位r2相对于径向的倾斜角度例如为45
°
。在周向上相邻的第2部位r2的端部彼此在径向内侧或径向外侧交替地连接。由此,多个第2部位r2整体上串联连接。
56.外侧第2电阻线部w22具有多个第2区域rg、rh。多个第2区域rg、rh在周向上隔开间隔地配置。在本实施方式中,外侧第2电阻线部w22具有两个第2区域rg、rh。两个第2区域rg、rh分别在以中心轴线9为中心的约180
°
的范围内呈半圆弧状设置。两个第2区域rg、rh同心且线对称地配置。另外,从中心轴线9到第2区域rg的径向的距离与从中心轴线9到第2区域rh的径向的距离大致相同。
57.如图6所示,多个第2区域rg、rh分别包含沿具有径向和周向双方的成分的方向延伸的第2部位r2在周向上重复配置的区域。具体而言,两个第2区域rg、rh分别是一根导线一边呈锯齿状弯折一边沿周向延伸而成的。多个第2部位r2以相互大致平行的姿势沿周向排列。两个第2区域rg、rh中的一方的第2区域rg的第2部位r2相对于径向而向周向另一侧倾斜。另一方的第2区域rh的第2部位r2相对于径向而向周向一侧倾斜。第2部位r2相对于径向的倾斜角度例如为45
°
。在周向上相邻的第2部位r2的端部彼此在径向内侧或径向外侧交替地连接。由此,多个第2部位r2整体上串联连接。
58.图7是包含第1电阻线部w1的四个第1区域ra、rb、rc、rd的第1桥式电路c1的电路图。如图6和图7所示,第1电阻线部w1具有与多个第1区域ra、rb、rc、rd连接的第1连接区域w13。在本实施方式中,第1区域ra、rb、rc、rd的数量为四个。多个第1区域ra、rb、rc、rd经由第1连接区域w13而连接。由此,形成第1桥式电路c1。
59.第1区域ra与第1区域rb依次串联连接。第1区域rc与第1区域rd依次串联连接。而且,在电源电压的 极与-极之间,两个第1区域ra、rb的列与两个第1区域rc、rd的列并联连接。另外,两个第1区域ra、rb的中间点m11和两个第1区域rc、rd的中间点m12与第1电压计v1连接。
60.各第1部位r1的电阻值根据施加于配置有电阻线412的区域的扭矩而变化。即,在本实施方式中,四个第1区域ra、rb、rc、rd的各第1部位r1的电阻值根据施加于基座部231的扭矩而变化。例如,当对基座部231施加以中心轴线9为中心而朝向周向的一侧的扭矩时,两个第1区域ra、rd的各第1部位r1的电阻值降低,其他两个第1区域rb、rc的各第1部位r1的电阻值增加。另一方面,在对基座部231施加以中心轴线9为中心而朝向周向的另一侧的扭矩时,两个第1区域ra、rd的各第1部位r1的电阻值增加,其他两个第1区域rb、rc的各第1部位r1的电阻值降低。这样,两个第1区域ra、rd与其他两个第1区域rb、rc针对扭矩显示出相互反向的电阻值变化。
61.而且,当四个第1区域ra、rb、rc、rd的各电阻值发生变化时,两个第1区域ra、rb的中间点m11与两个第1区域rc、rd的中间点m12之间的电位差发生变化,因此第1电压计v1的测量值也发生变化。因此,能够根据该第1电压计v1的测量值来检测施加于基座部231的扭矩的朝向和大小。
62.图8是包含第2电阻线部w2的四个第2区域re、rf、rg、rh的第2桥式电路c2的电路图。如图6和图8所示,第2电阻线部w2具有与多个第2区域re、rf、rg、rh连接的第2连接区域w23。在本实施方式中,第2区域re、rf、rg、rh的数量为四个。多个第2区域re、rf、rg、rh经由第2连接区域w23而连接。由此,形成第2桥式电路c2。
63.第2区域re与第2区域rf依次串联连接。第2区域rg与第2区域rh依次串联连接。而且,在电源电压的 极与-极之间,两个第2区域re、rf的列与两个第2区域rg、rh的列并联连接。另外,两个第2区域re、rf的中间点m21和两个第2区域rg、rh的中间点m22与第2电压计v2连接。
64.各第2部位r2的电阻值根据施加于配置有电阻线412的区域的扭矩而变化。在本实施方式中,四个第2区域re、rf、rg、rh的各第2部位r2的电阻值根据施加于基座部231的扭矩而变化。例如,在对基座部231施加以中心轴线9为中心而朝向周向的一侧的扭矩时,两个第2区域re、rh的各第2部位r2的电阻值降低,其他两个第2区域rf、rg的各第2部位r2的电阻值增加。另一方面,在对基座部231施加以中心轴线9为中心而朝向周向的另一侧的扭矩时,两个第2区域re、rh的各第2部位r2的电阻值增加,其他两个第2区域rf、rg的各第2部位r2的电阻值降低。这样,两个第2区域re、rh与其他两个第2区域rf、rg针对扭矩显示出相互反向的电阻值变化。
65.而且,当四个第2区域re、rf、rg、rh的各电阻值发生变化时,两个第2区域re、rf的中间点m21与两个第2区域rg、rh的中间点m22之间的电位差发生变化,因此第2电压计v2的测量值也发生变化。因此,能够根据该第2电压计v2的测量值来检测施加于基座部231的扭矩的朝向和大小。
66.这样,在本实施方式中,构成第1桥式电路c1和第2桥式电路c2这两个桥式电路。由此,即使在任意一方的桥式电路发生了异常的情况下,也能够通过另一方的桥式电路来检测扭矩。另外,能够在任意一方的桥式电路发生了异常的情况下检测到该异常。
67.另外,第1连接区域w13和第2连接区域w23的一部分也可以与共同的电源电压并联连接,也可以与不同的电源电压连接。即,电源电压也可以按照每个桥式电路而分开。在将电源电压按照每个桥式电路而分开的情况下,即使在一部分电源电压未正常发挥功能的情况下,也从其他电源电压向至少一个桥式电路提供电源电压,因此能够通过该桥式电路来检测扭矩。
68.检测电路42与电阻线412电连接。检测电路42可以安装于环状体20,或者也可以设置于远离环状体20的位置。检测电路42分别输出基于第1电压计v1的测量值的第1输出信号tr1和基于第2电压计v2的测量值的第2输出信号tr2。然而,检测电路42也可以根据第1桥式电路c1的输出信号与第2桥式电路c2的输出信号之和来输出信号。具体而言,检测电路42也可以根据基于第1电压计v1的测量值的第1输出信号tr1与基于第2电压计v2的测量值的第2输出信号tr2之和,输出表示施加于基座部231的扭矩的朝向和大小的检测信号。由此,在取决于基座部231的角度而基座部231从凸轮31等受到影响的情况下,输出不同的角度下的基于第1输出信号tr1与第2输出信号tr2之和的检测信号,由此能够输出降低了取决于该角度的影响的检测信号。另外,检测电路42也可以根据第1输出信号tr1和第2输出信号tr2的线性和来输出检测信号。另外,检测电路42也可以根据通过将第1输出信号tr1和第2输出信号tr2代入规定的函数而得到的结果来输出检测信号。另外,检测电路42也可以根据第1输出信号tr1和第2输出信号tr2中的任意一个来输出检测信号。
69.检测电路42具有诊断电阻线412的状态的诊断功能。以下,对该诊断功能进行说明。图9是示出检测电路42中的诊断处理的流程的流程图。如图9所示,检测电路42通过将第1桥式电路c1的输出信号与第2桥式电路c2的输出信号进行比较,输出表示电阻线412的状
态的诊断信号。由此,扭矩检测装置40能够诊断电阻线412的状态并输出。
70.具体而言,首先,检测电路42将基于第1电压计v1的测量值的第1输出信号tr1与基于第2电压计v2的测量值的第2输出信号tr2进行比较。然后,判定第1输出信号tr1与第2输出信号tr2的关系是否处于正常范围内(步骤st1)。例如,检测电路42判定第1输出信号tr1与第2输出信号tr2之差是否小于规定的阈值。
71.在第1电阻线部w1和第2电阻线部w2双方没有断线等异常的情况下,第1电阻线部w1和第2电阻线部w2针对施加于基座部231的扭矩显示出近似的电阻值变化。因此,第1输出信号tr1与第2输出信号tr2之差小于规定的阈值(在步骤st1中为“是”)。在该情况下,检测电路42输出第1信号作为表示电阻线412的状态的诊断信号(步骤st2)。第1信号是表示电阻线412没有异常的诊断信号。
72.另一方面,在第1电阻线部w1和第2电阻线部w2中的任意一方存在断线等异常的情况下,第1电阻线部w1和第2电阻线部w2中的存在该断线等异常的一方显示出与通常不同的电阻值。因此,第1输出信号tr1与第2输出信号tr2之差成为规定的阈值以上(在步骤st1中为“否”)。在该情况下,检测电路42输出表示电阻线412存在异常的第2信号(步骤st3)。
73.另外,在步骤st3的处理中,也可以检查第1桥式电路c1和第2桥式电路c2各自的电流值。由此,能够判定第1桥式电路c1和第2桥式电路c2中的哪一个桥式电路发生了异常。然后,也可以仅输出第2信号和正常发挥功能的桥式电路的输出信号。由此,能够通过正常发挥功能的桥式电路进行扭矩检测。
74.另外,在检测电路42判定为电阻线412存在异常的情况下,在第1桥式电路c1和第2桥式电路c2各自的电流值正常的情况下,能够判断为桥式电路以外的部位发生了异常。作为具体的例子,在电阻线412从基座部231剥离的情况下,能够检测出桥式电路以外的部位发生了异常。
75.另外,也可以省略上述的步骤st2。即,在第1桥式电路c1的输出信号与第2桥式电路c2的输出信号之差小于规定的阈值的情况下,检测电路42也可以不输出诊断信号。只要在第1桥式电路c1的输出信号与第2桥式电路c2的输出信号之差为规定的阈值以上的情况下,检测电路42输出规定的信号作为诊断信号即可。由此,在第1桥式电路c1和第2桥式电路c2中的哪一个桥式电路发生异常时,扭矩检测装置40能够输出诊断结果。
76.之后,检测电路42显示出诊断结果(步骤st4)。具体而言,检测电路42在省略了图示的显示器上显示由诊断信号表示的诊断结果。由此,波动减速器1或机器人100的用户能够得知电阻线412的状态。另外,上述步骤st4的诊断结果也可以通过显示器以外的设备或其他手段来显示。
77.如上所述,环状体20具有用于检测施加于基座部231的扭矩的电阻线412。另外,电阻线412具有第1电阻线部w1和第2电阻线部w2。因此,通过将第1电阻线部w1的输出信号与第2电阻线部w2的输出信号进行比较,能够诊断电阻线412的状态。即,能够实现能够检测施加于基座部231的扭矩,并且能够始终监视电阻线412的状态的扭矩检测装置40。
78.尤其是,在本实施方式中,如图5所示,在周向上相邻的第1区域ra、rb、rc、rd的周向的间隙w14和在周向上相邻的第2区域re、rf、rg、rh的周向的间隙w24配置于周向的相同位置。因此,能够在第1电阻线部w1和第2电阻线部w2中,使取决于周向的角度的影响近似。因此,通过将第1电阻线部w1的输出信号与第2电阻线部w2的输出信号进行比较,能够更高
精度地诊断电阻线412的状态。
79.在本实施方式中,内侧第1电阻线部w11所具有的第1区域ra、rb的数量、外侧第1电阻线部w12所具有的第1区域rc、rd的数量、内侧第2电阻线部w21所具有的第2区域re、rf的数量以及外侧第2电阻线部w22所具有的第2区域rg、rh的数量是相同的。具体而言,内侧第1电阻线部w11所具有的第1区域ra、rb的数量、外侧第1电阻线部w12所具有的第1区域rc、rd的数量、内侧第2电阻线部w21所具有的第2区域re、rf的数量以及外侧第2电阻线部w22所具有的第2区域rg、rh的数量均为两个。而且,内侧第1电阻线部w11中的在周向上相邻的第1区域ra、rb的周向的间隙w14、外侧第1电阻线部w12中的在周向上相邻的第1区域rc、rd的周向的间隙w14、内侧第2电阻线部w21中的在周向上相邻的第2区域re、rf的周向的间隙w24以及外侧第2电阻线部w22中的在周向上相邻的第2区域rg、rh的周向的间隙w24配置于周向的相同位置。
80.这样,在第1电阻线部w1和第2电阻线部w2中,取决于周向的角度的影响在大致相同的条件下产生。因此,通过将第1电阻线部w1的输出信号与第2电阻线部w2的输出信号进行比较,能够更高精度地诊断电阻线412的状态。
81.在波动减速器1驱动时,环状体20产生周期性的挠曲变形。因此,第1电阻线部w1的输出信号和第2电阻线部w2的输出信号包含有反映了原本想要测量的扭矩的成分以及由环状体20的周期性的挠曲变形引起的误差成分(波动误差)。该波动误差根据输入到环状体20的旋转运动的旋转角度而变化。
82.图10是示出第1电阻线部w1的波动误差e1和第2电阻线部w2的波动误差e2的时间变化的曲线图。图10的曲线图的横轴表示时刻。图10的曲线图的纵轴表示对表示波动误差的电压进行归一化而得到的值。这些波动误差e1、e2相当于上述“取决于周向的角度的影响”。如上所述,在本实施方式中,在周向上相邻的第1区域ra、rb、rc、rd的周向的间隙w14和在周向上相邻的第2区域re、rf、rg、rh的周向的间隙w24配置于周向的相同位置。因此,第1电阻线部w1的波动误差e1和第2电阻线部w2的波动误差e2成为近似的波形。因此,即使不进行后述的波动校正,通过将第1电阻线部w1的输出信号与第2电阻线部w2之差和规定的阈值进行比较,也能够高精度地诊断电阻线412的状态。另外,如上所述,图10的曲线图所示的波动误差e1、e2是对电压进行归一化而得到的值。作为上述“取决于周向的角度的影响”,也可以使用应变量来代替对电压进行归一化而得到的值。
83.另外,在本实施方式中,第1电阻线部w1和第2电阻线部w2以中心轴线9为中心呈同心状配置。这样,与第1电阻线部w1的中心和第2电阻线部w2的中心错开的情况相比,能够降低第1电阻线部w1的输出信号与第2电阻线部w2的输出信号的差异。因此,通过将第1电阻线部w1的输出信号与第2电阻线部w2的输出信号进行比较,能够更高精度地诊断电阻线412的状态。
84.另外,如图5所示,在本实施方式中,在周向上相邻的第1区域ra、rb、rc、rd的周向的间隙w14的中心角θ和在周向上相邻的所述第2区域re、rf、rg、rh的周向的间隙w24的中心角θ是相等的。这样,能够进一步降低第1电阻线部w1的输出信号与第2电阻线部w2的输出信号的差异。因此,通过将第1电阻线部w1的输出信号与第2电阻线部w2的输出信号进行比较,能够更高精度地诊断电阻线412的状态。
85.另外,如图5所示,在本实施方式中,第1电阻线部w1与第2电阻线部w2的径向的间
隔d0比第1区域ra、rb、rc、rd的径向的宽度d1和第2区域re、rf、rg、rh的径向的宽度d2中的任意宽度都窄。这样,如果缩小第1电阻线部w1与第2电阻线部w2的径向的间隔d0,与第1电阻线部w1与第2电阻线部w2的径向的间隔d0较大的情况相比,能够降低第1电阻线部w1的输出信号与第2电阻线部w2的输出信号中的、取决于径向的位置的影响的差异。因此,通过将第1电阻线部w1的输出信号与第2电阻线部w2的输出信号进行比较,能够更高精度地诊断电阻线412的状态。
86.另外,如图5所示,在本实施方式中,第1电阻线部w1与第2电阻线部w2的径向的间隔d0比在周向上相邻的第1区域ra、rb、rc、rd的间隔d3和在周向上相邻的第2区域re、rf、rg、rh的间隔d4中的任意间隔都窄。这样,如果缩小第1电阻线部w1与第2电阻线部w2的径向的间隔d0,与第1电阻线部w1与第2电阻线部w2的径向的间隔d0较大的情况相比,能够降低第1电阻线部w1的输出信号与第2电阻线部w2的输出信号中的、取决于径向的位置的影响的差异。因此,通过将第1电阻线部w1的输出信号与第2电阻线部w2的输出信号进行比较,能够更高精度地诊断电阻线412的状态。
87.多个第1区域ra、rb、rc、rd的电阻值可以相互相等。另外,多个第2区域re、rf、rg、rh的电阻值可以相互相等。这样,能够降低正常时的第1电阻线部w1的输出信号与正常时的第2电阻线部w2的输出信号的差异。因此,通过将第1电阻线部w1的输出信号与第2电阻线部w2的输出信号进行比较,能够更高精度地诊断电阻线412的状态。
88.另外,在本实施方式中,第1电阻线部w1具有四个第1区域ra、rb、rc、rd。而且,第1桥式电路c1成为包含四个第1区域ra、rb、rc、rd的全桥电路。然而,第1电阻线部w1也可以仅具有两个第1区域。在该情况下,第1桥式电路c1只要是由该两个第1区域和两个固定电阻构成的半桥电路即可。
89.另外,在本实施方式中,第2电阻线部w2具有四个第2区域re、rf、rg、rh。而且,第2桥式电路c2成为包含四个第2区域re、rf、rg、rh的全桥电路。然而,第2电阻线部w2也可以仅具有两个第2区域。在该情况下,第2桥式电路c2只要是由该两个第2区域和两个固定电阻构成的半桥电路即可。
90.如上所述,在波动减速器1驱动时,环状体20产生周期性的挠曲变形。因此,第1电阻线部w1的输出信号和第2电阻线部w2的输出信号包含有反映了原本想要测量的扭矩的成分以及由环状体20的周期性的挠曲变形引起的误差成分(波动误差)。该波动误差根据输入到环状体20的旋转运动的旋转角度而变化。
91.因此,本实施方式的检测电路42进行用于消除上述波动误差的校正处理(波动校正)。以下,对该波动校正进行说明。
92.如图5所示,本实施方式的电阻线412还具有第3电阻线部w3。第3电阻线部w3是用于检测输入到环状体20的旋转运动的旋转角度的电阻线部。
93.第3电阻线部w3具有多个第3区域ri、rj、rk、rl、rm、rn、ro、rp。在本实施方式中,第3电阻线部w3具有八个第3区域ri、rj、rk、rl、rm、rn、ro、rp。多个第3区域ri、rj、rk、rl、rm、rn、ro、rp在周向上隔开间隔地配置。在本实施方式中,八个第3区域ri、rj、rk、rl、rm、rn、ro、rp在周向上等间隔地配置。多个第3区域ri、rj、rk、rl、rm、rn、ro、rp分别由一根导线形成。各第3区域ri、rj、rk、rl、rm、rn、ro、rp沿着周向呈圆弧状扩展。
94.各第3区域ri、rj、rk、rl、rm、rn、ro、rp包含第3部位r3重复配置的区域。第3部位r3
沿周向延伸并在径向上重复配置。但是,第3部位r3也可以沿径向延伸并在周向上重复配置。
95.八个第3区域ri、rj、rk、rl、rm、rn、ro、rp中的彼此不相邻的四个第3区域ri、rk、rm、ro相互连接,从而形成第3桥式电路c3。图11是第3桥式电路c3的电路图。如图11所示,第3区域ri与第3区域rk依次串联连接。第3区域ro与第3区域rm依次串联连接。而且,在电源电压的 极与-极之间,两个第3区域ri、rk的列与两个第3区域ro、rm的列并联连接。另外,两个第3区域ri、rk的中间点m31和两个第3区域ro、rm的中间点m32与第3电压计v3连接。
96.八个第3区域ri、rj、rk、rl、rm、rn、ro、rp中的其余四个第3区域rj、rl、rn、rp相互连接,从而形成第4桥式电路c4。图12是第4桥式电路c4的电路图。如图12所示,第3区域rp与第3区域rn依次串联连接。第3区域rj与第3区域rl依次串联连接。而且,在电源电压的 极与-极之间,两个第3区域rp、rn的列与两个第3区域rj、rl的列并联连接。另外,两个第3区域rp、rn的中间点m41和两个第3区域rj、rl的中间点m42与第4电压计v4连接。
97.在波动减速器1驱动时,在环状体20的基座部231产生沿周向伸长的部分(以下称为“伸长部”)和沿周向收缩的部分(以下称为“收缩部”)。具体而言,两个伸长部和两个收缩部沿周向交替产生。即,伸长部和收缩部以中心轴线9为中心沿周向以90
°
的间隔交替产生。而且,产生这些伸长部和收缩部的部位以上述的第1转速进行旋转。
98.八个第3区域ri、rj、rk、rl、rm、rn、ro、rp的各电阻值根据基座部231的周向的伸缩而变化。例如,在上述伸长部与某个第3区域重叠时,该第3区域的电阻值降低。另外,在上述收缩部与某个第3区域重叠时,该第3区域的电阻值增加。
99.在图5的例子中,在收缩部与第3区域ri、rm重叠时,伸长部与第3区域rk、ro重叠。另外,在伸长部与第3区域ri、rm重叠时,收缩部与第3区域rk、ro重叠。因此,在第3桥式电路c3中,第3区域ri、rm与第3区域rk、ro显示出反向的电阻值变化。
100.另外,在图5的例子中,在收缩部与第3区域rp、rl重叠时,伸长部与第3区域rn、rj重叠。另外,在伸长部与第3区域rp、rl重叠时,收缩部与第3区域rn、rj重叠。因此,在第4桥式电路c4中,第3区域rp、rl与第3区域rn、rj显示出反向的电阻值变化。
101.图13是示出第3桥式电路c3的第3电压计v3的测量值v3和第4桥式电路c4的第4电压计v4的测量值v4的时间变化的曲线图。图13的曲线图的横轴表示时刻。图13的曲线图的纵轴表示电压值。在波动减速器1驱动时,如图13所示,从第3电压计v3和第4电压计v4分别输出周期性地变化的正弦波状的测量值v3、v4。这些测量值v3、v4的周期t相当于上述第1转速的周期的1/2倍。另外,通过第4电压计v4的测量值v4的相位相对于第3电压计v3的测量值v3的相位是超前了第1转速的1/8周期量(测量值v3、v4的1/4周期量)还是滞后了第1转速的1/8周期量(测量值v3、v4的1/4周期量),能够判断输入的旋转运动的朝向。
102.检测电路42能够根据这些第3电压计v3的测量值v3和第4电压计v4的测量值v4来检测输入到环状体20的旋转运动的旋转角度。具体而言,例如,检测电路42具有存储部,该存储部存储有将第3电压计v3的测量值v3和第4电压计v4的测量值v4的组合与旋转角度对应起来的函数表。检测电路42向该函数表输入测量值v3、v4,由此输出旋转角度。
103.另外,波动误差相对于环状体20的旋转角度呈正弦波状变化。检测电路42根据输出的旋转角度来计算上述波动误差。然后,使用计算出的波动误差对第1电阻线部w1的输出信号和第2电阻线部w2的输出信号进行校正。其结果为,检测电路42能够更高精度地输出施
加于环状体20的扭矩。
104.如上所述,本实施方式的电阻线412具有第3电阻线部w3。因此,能够检测输入到环状体20的旋转运动的旋转角度。因此,能够根据旋转角度对第1电阻线部w1的输出信号和第2电阻线部w2的输出信号进行校正。
105.另外,检测电路42也可以不对上述旋转角度进行运算,而是对第3电压计v3和第4电压计v4的各测量值v3、v4乘以规定的系数,并与第1电阻线部w1的输出信号和第2电阻线部w2的输出信号合成。这样,旋转角度的运算所需的处理负担得到减轻。因此,能够提高检测电路42的运算速度。
106.另外,在本实施方式中,在周向上相邻的第1区域ra、rb、rc、rd的周向的间隙w14和在周向上相邻的第2区域re、rf、rg、rh的周向的间隙w24与在周向上相邻的第3区域ri、rp的周向的间隙w34配置于周向的相同位置。这样,利用这些间隙w14、w24、w34,能够容易地将布线向径向外侧引出。
107.另外,在本实施方式中,第3电阻线部w3配置于比第1电阻线部w1和第2电阻线部w2靠径向外侧的位置。然而,第3电阻线部w3也可以配置于比第1电阻线部w1和第2电阻线部w2靠径向内侧的位置。另外,第3电阻线部w3也可以配置于第1电阻线部w1的径向外侧且配置于第2电阻线部w2的径向内侧。
108.也可以省略上述四个第3区域ri、rk、rm、ro中的两个第3区域ri、rk或两个第3区域rm、ro。即使在该情况下,通过使第3桥式电路c3成为使用了两个固定电阻的半桥电路,也能够得到与旋转角度对应的输出值。同样地,也可以省略上述四个第3区域rj、rl、rn、rp中的两个第3区域rj、rl或两个第3区域rn、rp。即使在该情况下,通过使第4桥式电路c4成为使用了两个固定电阻的半桥电路,也能够得到与旋转角度对应的输出值。
109.即,第3电阻线部w3只要具有四个以上的第3区域即可。由此,能够检测输入到环状体20的旋转运动的旋转角度和旋转的朝向。
110.第1电阻线部w1的电阻值和第2电阻线部w2的电阻值根据电阻线412的温度而稍微变化。因此,第1电阻线部w1的输出信号和第2电阻线部w2的输出信号包含有由温度引起的误差成分(温度误差)。因此,本实施方式的检测电路42进行用于消除上述温度误差的校正处理(温度校正)。以下,对该温度校正进行说明。
111.如图5所示,本实施方式的电阻线412还具有第4电阻线部w4。第4电阻线部w4是用于检测电阻线412的温度的电阻线部。第4电阻线部w4包含第4部位r4。第4部位r4沿周向延伸。即,第4部位r4以中心轴线9为中心呈圆弧状延伸。因此,由周向的扭矩引起的第4部位r4的电阻值的变化极小。另外,第4部位r4在绕中心轴线9的大致整周范围内延伸。因此,第4部位r4的电阻值不易受到由基座部231的挠曲变形引起的伸缩的影响。因此,在第4部位r4的电阻值中,由温度引起的变化占支配地位。
112.检测电路42测量第4部位r4的电阻值。测量出的电阻值成为反映了电阻线412的温度的信号。检测电路42根据测量出的该电阻值,对第1电阻线部w1的输出信号和第2电阻线部w2的输出信号进行校正。具体而言,使第1电阻线部w1的输出信号和第2电阻线部w2的输出信号在消除由温度引起的变化的方向上增加或减少。其结果为,检测电路42能够更高精度地输出施加于环状体20的扭矩。
113.如上所述,本实施方式的电阻线412具有第4电阻线部w4。因此,能够检测电阻线
412的温度。因此,能够根据电阻线412的温度来校正第1电阻线部w1的输出信号和第2电阻线部w2的输出信号。
114.另外,在本实施方式中,第4电阻线部w4配置于比第1电阻线部w1和第2电阻线部w2靠径向外侧的位置。然而,第4电阻线部w4也可以配置于比第1电阻线部w1和第2电阻线部w2靠径向内侧的位置。另外,第4电阻线部w4也可以配置于第1电阻线部w1的径向外侧且配置于第2电阻线部w2的径向内侧。
115.另外,在本实施方式中,第4电阻线部w4也可以配置于比第3电阻线部w3靠径向外侧的位置。然而,第4电阻线部w4也可以配置于比第3电阻线部w3靠径向内侧的位置。
116.此外,第4电阻线部也可以在径向上双重配置。在该情况下,能够通过两个第4电阻线部而分别对第1电阻线部w1的输出信号和第2电阻线部w2的输出信号进行校正。在该情况下,即使两个第4电阻线部中的任意一个发生异常,也能够立刻检测出异常。另外,即使两个第4电阻线部中的任意一个发生异常,也能够通过另一个第4电阻线部起到温度传感器的作用。
117.接着,对第2实施方式进行说明。以下,为了容易理解与上述第1实施方式的对应关系,使用与第1实施方式相同的标号。另外,以下,关于与第1实施方式相同的点,省略重复说明,以与第1实施方式的不同点为中心进行说明。
118.图14是第2实施方式的基板41的俯视图。如图14所示,在第2实施方式中,第1电阻线部w1的在周向上相邻的第1区域ra、rb、rc、rd的周向的间隙w14和第2电阻线部w2的在周向上相邻的第2区域re、rf、rg、rh的周向的间隙w24在周向上错开一定的角度而配置。这样,在第1电阻线部w1的输出信号和第2电阻线部w2的输出信号中,取决于周向的角度的影响以错开一定的角度的状态产生。因此,能够根据第1电阻线w1部的输出信号和第2电阻线部w2的输出信号而得到降低了取决于周向的角度的影响的输出信号。
119.在本实施方式中,内侧第1电阻线部w11所具有的第1区域ra、rb的数量、外侧第1电阻线部w12所具有的第1区域rc、rd的数量、内侧第2电阻线部w21所具有的第2区域re、rf的数量以及外侧第2电阻线部w22所具有的第2区域rg、rh的数量是相同的。具体而言,内侧第1电阻线部w11所具有的第1区域ra、rb的数量、外侧第1电阻线部w12所具有的第1区域rc、rd的数量、内侧第2电阻线部w21所具有的第2区域re、rf的数量以及外侧第2电阻线部w22所具有的第2区域rg、rh的数量均为两个。而且,内侧第1电阻线部w11和外侧第1电阻线部w12中的在周向上相邻的第1区域ra、rb、rc、rd的周向的间隙w14与内侧第2电阻线部w21和外侧第2电阻线部w22中的在周向上相邻的第2区域re、rf、rg、rh的周向的间隙w24在周向上错开一定的角度而配置。
120.这样,在第1电阻线部w1的输出信号和第2电阻线部w2的输出信号中,取决于周向的角度的影响以错开一定的角度的状态产生。因此,例如,在取决于周向的角度的影响为180
°
周期的情况下,能够根据第1电阻线部w1的输出信号和第2电阻线部w2的输出信号而得到降低了取决于周向的角度的影响的输出信号。
121.尤其是,在本实施方式中,上述“一定的角度”为90
°
。这样,在第1电阻线部w1的输出信号和第2电阻线部w2的输出信号中,取决于周向的角度的影响的周期错开90
°
。因此,通过取第1电阻线部w1的输出信号与第2电阻线部w2的输出信号之和,能够消除180
°
周期的取决于周向的角度的影响。
122.图15是示出第1电阻线部w1的波动误差e1和第2电阻线部w2的波动误差e2的时间变化的曲线图。图15的曲线图的横轴表示时刻。图15的曲线图的纵轴表示对表示波动误差的电压进行归一化而得到的值。这些波动误差e1、e2相当于上述“取决于周向的角度的影响”。如上所述,在本实施方式中,在周向上相邻的第1区域ra、rb、rc、rd的周向的间隙w14与在周向上相邻的第2区域re、rf、rg、rh的周向的间隙w24在周向上错开90
°
而配置。因此,第1电阻线部w1的波动误差e1与第2电阻线部w2的波动误差e2成为错开半周期的波形。因此,第1电阻线部w1的波动误差e1与第2电阻线部w2的波动误差e2始终成为正负相反而绝对值近似的值(正负颠倒的值)。
123.在该情况下,检测电路42能够通过计算第1电阻线部w1的输出信号与第2电阻线部w2的输出信号之和来消除波动误差e1、e2。因此,即使不进行第1实施方式那样的波动校正,也能够以降低了波动误差的状态输出施加于基座部231的扭矩的检测值。这样,在本实施方式中,不需要进行波动校正,因此能够省略第3电阻线部w3。
124.以上,对本发明的第1实施方式和第2实施方式进行了说明,但本发明并不限定于上述实施方式。
125.在上述实施方式中,电阻线412配置于能够柔软地变形的绝缘层411的表面。然而,电阻线412也可以配置于基座部231的表面234。例如,在基座部231的表面234形成绝缘膜,并在该绝缘膜的表面通过溅射等形成导体层。而且,也可以通过蚀刻等化学手段或激光等物理方法来去除导体层的不需要的部分,由此形成电阻线412。另外,绝缘膜例如使用无机绝缘材料。
126.另外,上述实施方式的环状体20是基座部231比体部21朝向径向外侧扩展的所谓的“礼帽型”的挠性外齿齿轮。礼帽型的环状体20在能够有效利用体部21的径向内侧的空间的方面是优异的。但是,环状体20也可以是基座部231比体部21朝向径向内侧扩展的所谓的“杯型”的挠性外齿齿轮。
127.另外,在上述实施方式中,对搭载于机器人100的波动减速器1进行了说明。然而,也可以将同样的构造的波动减速器1搭载于辅助套装、无人搬运台车等其他装置。
128.此外,关于环状体、波动减速器以及机器人的细部的结构,能够在不脱离本发明的主旨的范围内适当地进行变更。另外,能够在不产生矛盾的范围内对在上述各实施方式和各变形例中出现的要素适当地进行组合。
129.本发明例如能够利用于环状体、波动减速器、机器人以及扭矩检测装置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。