扫描电子显微镜装置、半导体制造装置及其控制方法
1.相关申请的交叉引用
2.本技术要求于2021年9月8日在韩国知识产权局提交的韩国专利申请no.10-2021-0119819的优先权的权益,该申请的公开内容以引用方式全部并入本文中。
技术领域
3.本公开涉及扫描电子显微镜装置、半导体制造装置和控制该半导体制造装置的方法。
背景技术:
4.对于诸如扫描电子显微镜(sem)装置的使用电子束的装置,期望将电子束准确地照射到要分析的物体和/或要处理的物体。从电子束源发射的电子束穿过由电磁场形成的聚光透镜,并入射到靶上。然而,可能需要大量的时间来手动地调节聚焦和像散,使得处理的效率可能降低。
技术实现要素:
5.示例实施例提供了一种可以调节并同时优化或改善聚焦和像散以改善处理效率的扫描电子显微镜装置、半导体制造装置和控制半导体制造装置的方法。
6.根据示例实施例,扫描电子显微镜(sem)装置包括:电子束源,其被配置为发射电子束;透镜单元,其设置在电子束源与被配置为安置包括具有图案的结构的物体的台之间,并且包括扫描线圈。扫描线圈被配置为生成电磁场以提供透镜。透镜单元包括像散调节器。控制单元被配置为改变透镜单元与物体之间的工作距离以获得多个原始图像,从多个原始图像获得其中出现结构的图案图像和其中出现电子束在物体上的分布的多个核心图像,并且利用从多个核心图像提取的特征值来控制像散调节器调节透镜单元的聚焦和像散。
7.根据示例实施例,半导体制造装置包括:电子束源,其被配置为向物体发射电子束;透镜单元,其位于物体与电子束源之间;以及控制单元,其被配置为改变透镜单元与物体之间的工作距离以获得多个原始图像,从多个原始图像获得其中以点扩散函数的形式表示聚焦在物体上的电子束的分布的多个核心图像,并且基于从多个核心图像提取的特征值来改善工作距离以及透镜单元的像散。
8.根据示例实施例,提供了一种控制半导体制造装置的方法,该半导体制造装置包括:电子束源,其被配置为向物体照射电子束;以及透镜单元,其被布置为位于电子束源与物体之间。该方法包括:调节透镜单元与物体之间的工作距离以获得多个原始图像;从原始图像获得单个图案图像和多个核心图像,单个图案图像包括物体中包括的结构,多个核心图像包括电子束在物体中的分布;从多个核心图像提取特征值;将特征值映射到二维平面;以及在二维平面中,参考利用将特征值彼此连接的向量生成的代表向量来确定用于调节透镜单元的像散的补偿方向。
附图说明
9.从以下结合附图的详细描述中,将更加清楚地理解本公开的以上和其它方面、特征和优点。
10.图1是根据示例实施例的半导体制造装置的示意图。
11.图2是示出根据示例实施例的半导体制造装置的操作的示图。
12.图3、图4a、图4b、图5a和图5b是示出根据示例实施例的半导体制造装置的操作的示图。
13.图6是示出根据示例实施例的半导体制造装置的聚焦和像散的示图。
14.图7a、图7b、图8a和图8b是示出根据示例实施例的半导体制造装置的聚焦和像散的示图。
15.图9和图10是示出根据示例实施例的控制半导体制造装置的方法的流程图。
16.图11a和图11b是示出根据示例实施例的由扫描电子显微镜(sem)装置获得的图像的示图。
17.图12a至图12c是示出根据示例实施例的控制半导体制造装置的方法的示图。
18.图13包括示出根据示例实施例的控制半导体制造装置的方法的示图。
19.图14a至图14i是示出根据示例实施例的控制半导体制造装置的方法的示图。
20.图15包括示出根据示例实施例的控制半导体制造装置的方法的示图。
21.图16至图18是示出根据示例实施例的控制半导体制造装置的方法的示图。
22.图19和图20是示出根据示例实施例的控制半导体制造装置的方法的示图。
23.图21是示出根据示例实施例的控制半导体制造装置的方法的示图。
24.图22是示出根据示例实施例的半导体制造装置的示意图。
具体实施方式
25.在下文中,参照附图描述示例实施例。
26.图1是根据示例实施例的半导体制造装置的示意图。
27.图1中所示的根据示例实施例的半导体制造装置可以是扫描电子显微镜(sem)装置10。参照图1,根据本发明的实施例的sem装置10可以包括电子束源20、透镜单元30、控制单元40等。sem装置10可以通过向安置在台50上的物体60照射电子束并且收集从物体60发射的信号来获得物体60的图像。例如,通过照射到物体60的电子束而从物体60发射的信号可以包括二次电子(se)、背散射电子(bse)、x射线、可见射线和阴极荧光等。
28.电子束源20可以生成并发射电子束,从电子束源20发射的电子束可以被加速,并且被透镜单元30聚焦以照射到物体60。作为示例,电子束源20可以包括电子枪。电子枪可以加热由钨等形成的灯丝以生成电子,并且可以将电压施加到电子以加速电子束。
29.透镜单元30可以包括第一聚焦透镜31、第二聚焦透镜32、物镜33等。第一聚焦透镜31和第二聚焦透镜32可以聚焦从电子束源20发射的电子束,使得电子束有效地聚焦在物体60的单个点上。作为示例,照射到物体60的电子束的直径越小,由控制单元40获得的图像的分辨率越高。此外,透镜单元30可以包括两个或更多个聚焦透镜31和32以提高图像的分辨率。从电子束源20发射的电子束可以在穿过第一聚焦透镜31和第二聚焦透镜32的同时逐渐减小直径。
30.物镜33可以将通过第一聚焦透镜31和第二聚焦透镜32聚焦的电子束聚焦在物体60上。例如,物镜33可以确定照射到物体60的电子束的强度。可以将物镜33与物体60之间的距离定义为工作距离,照射到物体60的电子束的直径可以根据工作距离而改变。因此,可以调节物镜33的位置以调节与物体60对应的图像的分辨率。
31.物镜33可以包括多个线圈,可以通过流到线圈的电流来改变照射到物体60的电子束的扫描角度和/或扫描方向。作为示例,电子束的折射程度可以根据流到线圈的电流而改变。如上所述,可以通过透镜单元30的像散来改变照射到物体60的电子束的分布。结果,可以通过诸如调节流到线圈的电流的方法来调节透镜单元30的像散,以按照期望的形状向物体60准确地照射电子束。
32.然而,透镜单元30的聚焦和像散可以是彼此影响的参数。例如,当调节物镜33与物体60之间的工作距离使得透镜单元30具有期望的聚焦并且随后调节流到物镜33的线圈的电流以调节像散时,在像散的调节期间,聚焦可能偏移。因此,可以同时优化或改善透镜单元30的聚焦和像散。
33.当操作者手动地调节透镜单元30的聚焦和像散时,可能需要几十分钟的大量的时间来优化或改善聚焦和像散。在示例实施例中,可以自动地且同时地优化或改善透镜单元30的聚焦和像散。此外,无论把要由sem装置10检查的物体60中包括的结构的图案如何都可以优化或改善透镜单元30的聚焦和像散,使得可以改善使用利用sem装置或电子束等的半导体制造装置的处理的效率。
34.作为示例,控制单元40可以在调节物镜33与物体60之间的工作距离的同时获得物体60的多个原始图像。多个原始图像中的在调节工作距离的同时获得的一些原始图像可以是离焦图像。控制单元40可以从多个原始图像获得其中出现物体60中包括的结构的图案图像和其中电子束在物体60中的形状和分布出现在物体60中的多个核心图像,并且可以基于从图像提取的特征值来自动地优化或改善透镜单元30的聚焦和像散。
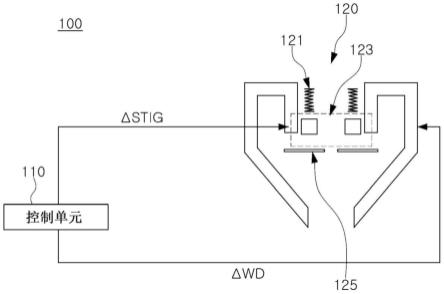
35.图2是示出根据示例实施例的半导体制造装置的操作的示图。
36.参照图2,半导体制造装置100可以包括控制单元110、物镜120等,物镜120可以包括多个扫描线圈121、像散调节器123、孔径125等。多个扫描线圈121可以将电子束偏转到物镜120的单个点。像散调节器123可以包括多个消像散器,并且可以调节流到消像散器的电流,以调节穿过物镜120的电子束的像散。
37.控制单元110可以将第一控制信号δwd和第二控制信号δstig输出到物镜120。第一控制信号δwd可以是用于调节物镜120的工作距离的信号,可以通过第一控制信号δwd移动物镜120以改变物镜120与物体之间的距离。第二控制信号δstig可以是输入到像散调节器123的信号。流到像散调节器123的消像散器的电流可以根据第二控制信号δstig而改变。因此,可以调节物镜120的像散。
38.控制单元110可以从在调节工作距离的同时获得的多个原始图像获得表示通过孔径125照射到物体的电子束的分布的多个核心图像。控制单元110可以从多个核心图像提取特征值,并且可以将特征值映射到期望的(或者可替换地,预定的)二维平面以确定用于调节物镜120的像散的补偿方向和用于从物体获得最佳图案图像的工作距离。以上操作可以允许确定第一控制信号δwd和第二控制信号δstig。
39.像散调节器123可以在多个方向上调节像散。作为示例,像散调节器123中包括的
消像散器可以在平行于物体的表面的方向之中的两个或更多个方向上调节像散。
40.图3、图4a、图4b、图5a和图5b是示出根据示例实施例的半导体制造装置的操作的示图。
41.图3可以是示出根据示例实施例的包括在半导体制造装置中的像散调节器200的示意图。参照图3,像散调节器200可以包括改变电磁场以调节像散的多个消像散器210至240,并且多个消像散器210至240中的每一个可以包括一对消像散器。
42.在图3中所示的示例实施例中,在使用电子束的半导体制造装置中,d1-d2平面可以是电子束穿过的平面。例如,第一消像散器210和第二消像散器220可以在方向d1和方向d2上调节电子束,第三消像散器230和第四消像散器240可以在与方向d1和方向d2相交的对角线方向上调节电子束。
43.参照图4a,可以调节施加到第一消像散器210和第二消像散器220的电流以调节照射到物体的表面的电子束在方向d1或方向d2上的分布。如图4b中所示,当第一消像散器210和第二消像散器220在正( )方向上调节像散时,电子束可以处于具有在方向d2上延伸的长轴的椭圆的形式。同时,当第一消像散器210和第二消像散器220在负(-)方向上调节像散时,电子束可以处于具有在方向d1上延伸的长轴的椭圆的形式。
44.参照图5a,可以调节施加到第三消像散器230和第四消像散器240的电流以调节照射到物体的表面的电子束在与方向d1和方向d2相交的对角线方向上的分布。如图5b中所示,当第三消像散器230和第四消像散器240在正方向上调节像散时,电子束可以处于具有在第一对角线方向上延伸的长轴的椭圆的形式。第一对角线方向可以是在逆时针方向上与方向d1倾斜45度的方向。同时,当第三消像散器230和第四消像散器240在负方向上调节像散时,电子束可以处于具有在垂直于第一对角线方向的第二对角线方向上延伸的长轴的椭圆的形式。
45.因此,多个消像散器210至240可以在各种方向上调节像散。作为示例,当第一消像散器210和第二消像散器220在正方向上调节像散并且第三消像散器230和第四消像散器240在负方向上调节像散时,电子束可以处于具有在第二对角线方向与方向d2之间的方向上延伸的长轴的椭圆的形式。
46.图6是示出根据示例实施例的半导体制造装置的聚焦和像散的示图。
47.作为示例,从半导体制造装置的电子束源照射的电子束可以通过扫描线圈聚焦在物体的单个点上。如图6中所示,由电子束源照射的电子束可以在物镜的平面中具有圆形形状。因此,在使用电子束的半导体处理中,当要用电子束照射的物体的目标区域设置在物镜的焦距处时,电子束在目标区域中的分布也可以以圆形形状出现。例如,当使用电子束的半导体制造装置是扫描电子显微镜(sem)装置时,其中存在要由sem装置测量的结构的目标区域设置在物镜的焦距处。在此情况下,在目标区域中,电子束的分布可以具有圆形形状,并且可以获得其中准确地表达结构而没有失真的图案图像。
48.同时,当物体的目标区域与物镜的焦距不匹配时,电子束可以沿着具有方向性的形状分布,而不是如图6中所示的电子束的圆形形状。例如,在其中物体的目标区域被设置为比物镜的焦距更远的过焦条件的情况下,目标区域中的电子束分布可以具有在第一对角线方向上延伸的形状。同时,在其中物体的目标区域被定位为比物镜的焦距更近的欠焦条件的情况下,电子束在目标区域中的分布可以具有在第二对角线方向上延伸的形状。因此,
在sem装置的情况下,目标区域中包括的结构可能因在过焦条件下在第一对角线方向上延伸而出现失真,并且可能因在欠焦条件下在第二对角线方向上延伸而出现失真。
49.可以调节物镜与物体之间的工作距离以解决以上问题,但是在处于其中发生像散的状态下的图像中诸如模糊的噪声可能增加。因此,可能难以确定准确地调节聚焦的工作距离。即使当首先调节像散时,也可能难以或不可能去除像散,除非在调节像散期间的工作距离是准确地调节聚焦的工作距离。结果,可以同时调节物镜的像散和工作距离以找到用于获得没有失真的图像的操作条件。因此,本公开提出一种自动地且同时地调节物镜的工作距离和像散的方法。
50.如图6中所示,其中电子束在过焦条件下照射到物体的目标区域的区域的方向性可以垂直于其中电子束在欠焦条件下照射到物体的目标区域的区域的方向性。在下文中,参照图7a、图7b、图8a和图8b对此进行更加详细地描述。
51.图7a、图7b、图8a和图8b是示出根据示例实施例的半导体制造装置的聚焦和像散的示图。
52.在图7a中所示的示例实施例中,在过焦条件301下照射到物体的目标区域的电子束的分布可以具有与方向d1对应的方向性。在此情况下,在欠焦条件302下照射到物体的目标区域的电子束的分布可以具有与垂直于方向d1的方向d2对应的方向性。
53.参照图7b,在过焦条件303下照射到物体的目标区域的电子束的分布可以具有与朝向左上部分的第二对角线方向对应的方向性。另一方面,在欠焦条件304下照射到物体的目标区域的电子束的分布可以具有与垂直于第二对角线方向的第一对角线方向对应的方向性。
54.在图8a中所示的示例实施例中,在过焦条件305下照射到物体的目标区域的电子束的分布可以具有与方向d2对应的方向性。在此情况下,在欠焦条件306下照射到物体的目标区域的电子束的分布可以具有与垂直于方向d2的方向d1对应的方向性。
55.参照图8b,在过焦条件307下照射到物体的目标区域的电子束的分布可以具有与朝向右上部分的第一对角线方向对应的方向性。另一方面,在欠焦条件308下照射到物体的目标区域的电子束的分布可以具有与垂直于第一对角线方向的第二对角线方向对应的方向性。
56.如上所述,照射到物体的目标区域的电子束的分布可能由于物镜的工作距离以及像散的影响而改变。在示例实施例中,可以从通过调节物镜的工作距离而获得的原始图像获得表示电子束的分布的核心图像。根据捕获原始图像的物镜的工作距离,核心图像中的每一个可以表示在过焦条件或欠焦条件下照射到物体的目标区域的电子束的分布。因此,可以从核心图像提取表示电子束的方向性的特征值,并且可以利用特征值来获得用于调节像散的补偿数据和用于获得最佳图像的工作距离。结果,在示例实施例中,可以通过自动地且同时地调节物镜的工作距离和像散来改善使用电子束的半导体制造装置的性能。
57.图9和图10是示出根据示例实施例的控制半导体制造装置的方法的流程图。
58.参照图9和图10描述的控制半导体制造装置的方法可以应用于诸如扫描电子显微镜(sem)装置的使用电子束的装置,并且可以由半导体制造装置的控制单元执行。参照图9,根据示例实施例的控制半导体制造装置的方法可以从操作s10开始,在操作s10中,控制单元调节工作距离以获得多个原始图像。如上所述,工作距离可以是物镜与物体之间的距离。
当物镜的工作距离与焦距匹配时,物体的目标区域可以准确地位于物镜的焦点处。
59.当物镜的工作距离比焦距长时,电子束可以在过焦条件下照射到物体的目标区域。此外,当物镜的工作距离比焦距短时,电子束可以在欠焦条件下照射到物体的目标区域。因此,在调节工作距离的同时在操作s10中获得的多个原始图像可以包括在过焦条件下获得的至少一个原始图像和在欠焦条件下获得的至少一个原始图像。
60.在操作s11中,当获得多个原始图像时,控制单元可以从多个原始图像获得单个图案图像和多个核心图像。图案图像可以是其中出现存在于物体的要被电子束照射到的目标区域中的结构的图像。多个核心图像可以是示出照射到物体的电子束的分布的图像。作为示例,多个核心图像中的每一个中出现的电子束的分布可以根据如以上参照图6至图8b描述的物镜的焦距与工作距离之间的差、像散等而改变。
61.在操作s12中,控制单元可以从多个核心图像提取特征值。特征值可以是表示多个核心图像中的每一个中出现的电子束的分布的方向性的值。作为示例,特征值可以包括关于电子束的分布所指向的方向以及电子束在对应的方向上有多广泛地扩展和分布的数据。
62.在操作s13中,控制单元可以从特征值获得用于调节像散的补偿数据。作为示例,多个核心图像中的电子束分布可以彼此不同,并且因此,包括在特征值中的多条数据也可以彼此不同。在操作s14中,控制单元可以利用特征值来获得具有不明显超出特征值的总体趋势的稳健特性的补偿数据,并且可以基于补偿数据来调节像散。控制单元可以调节像散,并且可以同时确定物镜的最佳工作距离。
63.参照图10,根据示例实施例的控制半导体制造装置的方法可以从操作s20开始,在操作s20中,控制单元调节工作距离并且获取多个原始图像。当获得多个原始图像时,半导体制造装置的控制单元可以执行操作以从多个原始图像获得单个图案图像和多个核心图像。
64.作为示例,多个原始图像中的每一个可以对应于其中出现存在于物体中的结构的图案图像和分别与根据工作距离照射到物体的电子束的形状对应的多个核心图像的卷积。因此,控制单元可以将去卷积操作应用于多个原始图像以获得与图案图像对应的第一等式和与多个核心图像中的每一个中出现的电子束形状的分布对应的第二等式。
65.在操作s21中,控制单元可以将图案图像和多个核心图像初始化以获得图案图像和多个核心图像。例如,控制单元可以设定图案图像的初始值以及多个核心图像中的每一个的初始值。作为示例,控制单元可以选择图案图像的初始值作为随机噪声图像,并且可以选择多个核心图像中的每一个的初始值作为点扩散函数(psf),点扩散函数(psf)具有不具有方向性的高斯分布。
66.在操作s22和s23中,当确定图案图像的初始值以及多个核心图像中的每一个的初始值时,控制单元可以将梯度下降方法应用于第一等式和第二等式中的每一个以优化或改善图案图像和多个核心图像。参照图10,控制单元可以交替地优化或改善图案图像和多个核心图像。与图10中所示的示例实施例不同,多个核心图像可以在图案图像之前被优化或改善。在操作s24中,控制单元可以对图案图像和多个核心图像重复地执行优化或改善操作,并且可以将优化或改善操作重复地执行期望的(或者可替换地,预定的)优化次数。控制单元可以包括图形处理单元(gpu)和中央处理单元(cpu)。控制单元可以对图像处理专用的gpu而不是对cpu执行优化或改善操作,以减少优化或改善操作所需的时间。
67.在操作s25中,当将图案图像和多个核心图像优化或改善了优化或改善的次数时,控制单元可以从多个核心图像中的每一个提取表示电子束的分布的特征值。从多个核心图像中的每一个提取的特征值可以表示多个核心图像中的每一个中出现的电子束分布的长度和倾斜角度。在操作s26中,控制单元可以将在操作s24中提取的特征值映射到另外定义的二维(2d)平面。
68.控制单元可以在操作s27中生成将映射到2d平面的特征值彼此连接的向量,并且可以在操作s28中从向量生成代表向量。作为示例,控制单元可以将多个生成的向量归一化,并且可以将归一化的向量的中间向量的方向确定为代表向量的方向。此外,控制单元可以将特征值的方差(例如,标准偏差)确定为代表向量的长度。
69.控制单元可以在操作s29中从在操作s28中生成的代表向量获得用于调节像散的补偿数据,并且可以在操作s30中基于补偿数据来调节像散。作为示例,控制单元可以根据代表向量的方向来补偿像散,并且可以通过代表向量的长度来补偿像散。
70.在操作s30中,控制单元可以调节物镜的工作距离以及像散。作为示例,控制单元找到映射到2d平面的特征值之中的最接近2d平面的原点的特征值,并且可以将物镜的工作距离设定为对应于与找到的特征值对应的原始图像的工作距离。
71.在操作s31中,当完成工作距离和像散的调节时,控制单元可以确定是否完成聚焦和像散的调节。作为示例,控制单元可以利用在操作s26中映射到2d平面的特征值的分布来确定是否完成聚焦和像散的调节。在示例实施例中,当特征值分布在2d平面的期望的(或者可替换地,预定的)范围内时,控制单元可以确定已经完成优化或改善。
72.当操作s31中的确定的结果是尚未完成聚焦和像散的调节时,控制单元可以在操作s20中重新调节物镜的工作距离以获得新的原始图像。在控制单元获得新的原始图像的同时,基于在操作s30中设定的工作距离来改变物镜的工作距离,并且物镜的像散可以具有在操作s30中调节的像散。因此,由控制单元获得的新的原始图像可以与上述多个原始图像不同。
73.控制单元可以利用新的原始图像重新执行操作s21至s30以确定用于调节物镜的像散和新的工作距离的补偿数据。在操作s31中,控制单元可以基于映射到2d平面的特征值的分布来重新确定是否已经完成聚焦和像散的调节。作为确定的结果,即使当未确定已经完成优化或改善时,控制单元也可以基于新提取的特征值来调节物镜的工作距离和像散,并且可以随后重新执行操作s20至s30。
74.在操作s32中,当操作s31中的确定是已经完成聚焦和像散的调节时,控制单元可以获得物体的目标区域的图像。由于控制单元可以执行操作s20至s30至少一次以调节适于焦距的物镜的工作距离,并且尽可能多地补偿物镜的像散,因此,可以获得清晰且准确的图像。
75.如上所述,在示例实施例中,当仅确定物镜的工作距离的初始值时,半导体制造装置可以自动地调节物镜的像散,并且可以同时操作与最佳工作距离对应的物镜。因此,使用电子束的半导体制造装置可以减少控制像散以及优化或改善焦距所需的时间以利用半导体制造装置改善各种处理的效率。
76.图11a和图11b是示出根据示例实施例的由扫描电子显微镜(sem)装置获得的图像的示图。
77.在图11a中所示的示例实施例中,具有弱方向性的结构可以被包括在由sem装置获得的图像中。作为示例,参照图11a,当由sem装置捕获具有弱方向性并且重复出现的结构(诸如包括在竖直存储器装置中的沟道结构)时,可以相对容易地调节sem装置的像散和聚焦。
78.另一方面,在图11b中所示的示例实施例中,可以由sem装置捕获具有清晰方向并且不重复出现的结构(诸如包括在半导体装置中的互连图案)。在此情况下,与图11a中所示的示例实施例相比,可能需要相对大量的时间来调节sem装置的像散和聚焦。
79.如上所述,根据示例实施例,可以通过将去卷积操作应用于在改变sem装置中的工作距离的同时获得的多个原始图像来提取表示由像散导致的电子束的分布的多个核心图像。因此,如图11b中所示,即使当期望对具有清晰方向性的结构成像时,可以获得其中反映了由像散导致的电子束的分布失真的多个核心图像。此外,由于可以基于从多个核心图像提取的特征值来获得用于调节像散的补偿数据,因此,无论物体中包括的结构的方向性和形状如何都可以自动且快速地执行像散调节和聚焦调节。
80.图12a至图12c是示出根据示例实施例的控制半导体制造装置的方法的示图。
81.图12a至图12c可以是示出在改变使用电子束的半导体制造装置400中的物镜401的工作距离的同时获得多个原始图像的方法的示图。参照图12a至图12c,物体403可以安置在台402上,并且sem装置400的控制单元可以将物镜401的工作距离设定为第一工作距离wd1至第三工作距离wd3以获得多个原始图像405至407。工作距离可以如上所述是物镜401与物体403之间的距离。电子束收集单元404可以设置在物镜401的接近物体403的一侧上。
82.参照图12a,控制单元可以在其中物镜401设置在第一工作距离wd1处的状态下获得第一原始图像405。例如,第一工作距离wd1可以比物镜401的焦距短,第一原始图像405可以是在欠焦条件下捕获的图像。
83.参照图12b,控制单元可以在其中物镜401设置在第二工作距离wd2处的状态下获得第二原始图像406。第二工作距离wd2可以与物镜401的焦距基本匹配,并且因此,物体中包括的结构可以被显示为在第二原始图像406中相对清晰。
84.参照图12c,控制单元可以在其中物镜401设置在第三工作距离wd3处的状态下获得第三原始图像407。例如,第三工作距离wd3可以比物镜401的焦距长,第三原始图像407可以是在过焦条件下捕获的图像。
85.如以上参照图12a至图12c描述的,半导体制造装置400的控制单元可以在改变物镜的工作距离的同时获得多个原始图像405至407。由于电子束根据物镜的工作距离在诸如过焦条件和欠焦条件的各种条件下照射到同一物体的目标区域,因此,物体的目标区域可以在多个原始图像405至407中被表达为不同。在下文中,参照图13对此进行更加详细地描述。
86.图13包括示出根据示例实施例的控制半导体制造装置的方法的示图。
87.图13是示出通过在使用电子束的半导体制造装置中在各种工作距离wd1至wd9处将电子束照射到物体的目标区域而获得的多个原始图像501至509的示图。参照图13,最接近物镜的焦距的工作距离可以是第三工作距离wd3或第四工作距离wd4。因此,物体的目标区域中包括的结构可以被显示为在第三原始图像503或第四原始图像504中最清晰。
88.在第一原始图像501和第七原始图像507至第九原始图像509中的每一个中,可能
几乎不显示物体的目标区域中包括的结构。然而,由于通过将电子束照射到同一结构来获得多个原始图像501至509,因此,可以通过其中显示结构的图案图像以及多个核心图像的卷积操作来获得多个原始图像501至509。例如,可以通过将彼此不同的第一核心图像至第九核心图像中的每一个应用于单个图案图像来获得第一原始图像501至第九原始图像509。
89.因此,相反地,可以通过将去卷积操作应用于多个原始图像501至509中的每一个来获得单个图案图像和多个核心图像。图案图像可以是其中显示形成在物体的目标区域中的结构的图像,多个核心图像可以是表示照射到物体的目标区域的电子束的分布的图像。例如,可以以点扩散函数的形式表达多个核心图像中的每一个中的电子束的分布。在下文中,参照图14a至图14i对此进行更加详细地描述。
90.图14a至图14i是示出根据示例实施例的控制半导体制造装置的方法的示图。
91.参照图14a至图14i,可以通过在相同的条件下在仅改变物镜的工作距离的同时将电子束照射到物体的目标区域来获得多个原始图像501至509。如上所述,可以通过将去卷积操作应用于多个原始图像501至509来提取单个图案图像510和多个核心图像521至529。
92.其中显示物体的目标区域中包括的结构的图案图像510和其中照射到物体的目标区域的电子束被表示为点扩散函数的多个核心图像521至529两者具有未知的值。因此,有必要对图案图像510和多个核心图像521至529中的每一个进行估计。在示例实施例中,可以在以下的假设下各自估计图案图像510和多个核心图像521至529:显示在图案图像510上的结构具有锐利的特性,表示多个核心图像521至529中的电子束的分布的点扩散函数具有高斯分布,并且物镜的焦距存在于用于捕获多个原始图像501至509的工作距离的范围内。
93.用于提取图案图像510和多个核心图像521至529中的每一个的去卷积的优化或改善等式可以由下面的等式1表示。
[0094][0095]
在等式1中,k可以对应于具有高斯分布的点扩散函数(例如,多个核心图像521至529),u可以对应于图案图像510。此外,f可以对应于多个原始图像501至509,λ可以是平衡参数。等式1可以被划分为用于获得图案图像510的等式2和用于获得多个核心图像521至529的等式3。半导体制造装置的控制单元可以交替地优化或改善等式2和等式3。作为示例,控制单元可以通过将梯度下降方法应用期望的(或者可替换地,预定的)次数来优化或改善等式2和等
[0096]
式3。
[0097][0098][0099]
需要选择图案图像510的初始值和多个核心图像521至529中的每一个的初始值,使得通过对其应用梯度下降方法来优化或改善等式2和等式3。在示例实施例中,半导体制造装置的控制单元可以将图案图像510的初始值设定为随机噪声图像,并且可以将多个核心图像521至529中的每一个中包括的点扩散函数的初始值设定为不具有方向性的高斯分布函数。将梯度下降方法应用于要被优化或改善的图案图像510和多个核心图像521至529
中的每一个的方法可以如下面的等式4和等式5中所定义的。
[0100][0101][0102]
总之,可以通过从随机噪声图像(初始值)开始重复地减去通过用对应于图案图像510的u对等式2进行微分而获得的值来优化或改善图案图像510。可以通过从不具有方向性的高斯分布函数(初始值)开始重复地减去通过用对应于多个核心图像521至529的协方差的σi对等式3进行微分而获得的值来优化或改善由多个核心图像521至529中的每一个表示的点扩散函数。可以重复地执行参照等式4和等式5描述的操作以提取如图14a至图14i中所示的图案图像510和多个核心图像521至529。
[0103]
由于多个核心图像521至529将电子束的分布表示为点扩散函数,因此旋转90度的点扩散函数可以出现在多个核心图像521至529中的至少一些中。作为示例,在图14a至图14i中所示的示例实施例中,第四核心图像524中所示的第四点扩散函数可以具有相对于第六核心图像526中所示的第六点扩散函数旋转90度的形状。这可以是因为在过焦条件和欠焦条件中的每一个下照射到物体的电子束的分布旋转90度,如以上参照图7a至图8b描述的。
[0104]
图15包括示出根据示例实施例的控制半导体制造装置的方法的示图。
[0105]
图15是示出重复地执行参照图14a至图14i描述的操作以优化或改善来自多个原始图像的图案图像和多个核心图像的过程的示图。如上所述,可以在该操作之前将图案图像601和多个核心图像611至619(统称为“610”)初始化。
[0106]
参照图15,可以将图案图像601初始化为随机噪声图像,并且因此,具有特定图案的结构可以不出现在初始化的图案图像601中。可以将表示多个核心图像611至619中的电子束的分布的点扩散函数初始化为不具有方向性的高斯分布函数。因此,初始化的核心图像611至619中的每一个中的电子束的分布可以以相同的点扩散函数的形式出现,如图15中所示。
[0107]
参照图15,当重复地执行优化或改善时,可以更新图案图像602至604。最终,可以获得其中显示物体的目标区域中包括的结构的图案图像604。此外,当重复地执行优化或改善时,表示多个核心图像620至640中的电子束的分布的点扩散函数可以被表达为具有不同的方向性和分布的高斯分布函数。
[0108]
例如,参照重复地执行优化或改善第一次数之后获得的多个核心图像621至629(统称为“620”),与初始化的核心图像611至619不同,点扩散函数可以在核心图像621至629中的至少一些中被表达为具有方向性的分布函数。在其中重复地执行优化或改善大于第一次数的第二次数的多个核心图像631至639(统称为“630”)中,点扩散函数的差异可以更清晰。在其中重复地执行优化或改善大于第二次数的第三次数的多个核心图像641至649(统称为“640”)中,点扩散函数的差异可以进一步增大。作为示例,在重复地执行优化或改善第三次数之后,表示第一核心图像641中的电子束的分布的点扩散函数可以具有与表示第九核心图像649中的电子束的分布的点扩散函数的方向性和分布显著不同的方向性和分布。
[0109]
如图15中所示,当重复地执行优化或改善并且其次数达到期望的(或者可替换地,
预定的)数量时,半导体制造装置的控制单元可以从多个核心图像641至649中的每一个提取特征值,并且可以从特征值确定是否已经完成优化或改善。在下文中,参照图16至图18更详细地描述从多个核心图像641至649提取特征值的方法和确定是否已经完成优化或改善的方法。
[0110]
图16至图18是示出根据示例实施例的控制半导体制造装置的方法的示图。
[0111]
参照图16,半导体制造装置的控制单元可以从通过重复地执行优化或改善期望的(或者可替换地,预定的)次数而获得的多个核心图像701至709提取特征值。在图16中所示的示例实施例中,假设控制单元改变物镜的工作距离以获得九个原始图像并且以从九个原始图像获得九个核心图像701至709。因此,特征值的数量也可以是九个。然而,核心图像701至709的数量和特征值的数量可以根据示例实施例而改变。
[0112]
控制单元可以获得表示核心图像701至709中的每一个中的电子束的分布的点扩散函数的协方差矩阵,并且可以计算协方差矩阵的本征值。在示例实施例中,控制单元可以如下面的等式6中所示从协方差矩阵σ获得第一本征值λ1和第二本征值λ2。
[0113][0114][0115][0116]
在等式6中,第一本征值λ1可以对应于点扩散函数的长轴,第二本征值λ2可以对应于点扩散函数的短轴。当获得第一本征值λ1和第二本征值λ2时,可以如下面的等式7中所示生成其中定义了x轴和y轴的二维(2d)平面,可以将从核心图像701至709提取的特征值701至709映射到2d平面。作为示例,可以将与核心图像701至709对应的特征值映射到2d平面,如图16中所示。
[0117]
(x,y)=(-λ2cos2θ,λ2sin2θ)
[0118][0119]
图16中所示的直线可以是从映射到2d平面的特征值获得的像散的补偿方向。然而,当从如上所述的映射到2d平面的特征值确定像散的补偿方向时,显著受到诸如因为焦点显著偏移而出现在原始图像中的模糊的噪声影响的第一特征值等可能显著影响补偿方向。因此,可能难以获得可以准确地调节像散的补偿方向。
[0120]
因此,在示例实施例中,可以如图17中所示利用多个特征值来生成多个向量。参照图17,向量可以是从第i特征值连接到第j特征值的向量,并且i可以小于j。因此,可以连接n个特征值以生成n*(n-1)/2个向量。例如,可以生成从第一特征值连接到第二特征值至第九特征值的向量,并且可以生成从第二特征值连接到第三特征值至第九特征值的向量。可以利用2d平面的原点作为起始点来对准生成的向量,可以通过将对准的向量归一化来生成代表向量vr。代表向量vr可以是中间向量,并且可以将用于调节像散的补偿方向确定为代表向量vr的方向。
[0121]
控制单元可以确定与像散的调节强度对应的代表向量vr的长度lvec。参照图18,可以将代表向量vr的长度lvec确定为从特征值的坐标计算的方差(例如,标准偏差)。控制单元可以利用代表向量vr的方向和长度lvec来调节流到消像散器的电流以调节像散。可以将用于聚焦的物镜的工作距离确定为这样的原始图像的工作距离:从该原始图像提取出最接近2d平面的原点的特征值。
[0122]
图19和图20是示出根据示例实施例的控制半导体制造装置的方法的示图。
[0123]
图19和图20可以是示出在不同的初始像散条件下捕获多个原始图像之后从要被优化或改善的多个原始图像提取的多个核心图像的示图。在参照图19和图20描述的示例实施例中,可以在其中使用消像散器有意地生成像散的状态下获得多个原始图像。
[0124]
在图19中,属于第一组800的核心图像801至809可以是从通过利用消像散器在x方向上生成-1.2%的像散并且在y方向上生成-1.2%的像散而获得的多个原始图像提取的图像。例如,x方向可以对应于参照图4a和图4b描述的方向d1和方向d2,y方向可以对应于参照图5a和图5b描述的对角线方向。
[0125]
半导体制造装置的控制单元可以从属于第一组800的核心图像801至809提取特征值,并且可以将提取的特征值映射到二维(2d)平面以获得用于调节可以获得最佳结果的物镜的工作距离和像散的补偿数据。在示例实施例中,可以将第一组800中的最佳工作距离确定为获得第五核心图像805的工作距离。
[0126]
属于第二组810的核心图像811至819可以是从通过在x方向上生成-1.2%的像散并且在y方向上生成 1.2%的像散而获得的多个原始图像提取的图像。因此,表示核心图像811至819中的电子束的分布的点扩散函数可以与第一组800的点扩散函数不同。即使在第二组810中,最佳工作距离也可以是获得第五核心图像815的工作距离。
[0127]
属于第三组820的核心图像821至829可以是从通过在x方向上生成 1.2%的像散并且在y方向上生成 1.2%的像散而获得的多个原始图像提取的图像。因此,表示核心图像821至829中的电子束的分布的点扩散函数可以与第一组800和第二组810中的每一个的点扩散函数不同。即使在第三组820中,最佳工作距离也可以是获得第五核心图像825的工作距离。参照图19,第五核心图像825的点扩散函数的方向性可以小于其它核心图像821至824和826至829的点扩散函数的方向性。
[0128]
属于第四组830的核心图像831至839可以是从在其中使用消像散器显著地去除像散的状态下获得的多个原始图像提取的图像。因此,表示核心图像831至839中的电子束的分布的点扩散函数可以具有相对更少的方向性。即使在第四组830中,最佳工作距离也可以是获得第五核心图像835的工作距离。参照图19,第五核心图像835的点扩散函数可以分布在比其它核心图像831至834和836至839的点扩散函数的区域窄的区域中。
[0129]
在参照图19描述的示例实施例中,可以在期望的(或者可替换地,预定的)范围内调节物镜的工作距离的同时获得多个原始图像。在此情况下,与焦距对应的工作距离可以存在于对应的范围的中间中。另一方面,在图20中所示的示例实施例中,与焦距匹配的工作距离可以不存在于对应的范围的中间中。
[0130]
在图20中,属于第一组900的核心图像901至909可以是从通过使用消像散器在x方向上生成 1.2%的像散并且在y方向上生成 1.2%的像散而获得的多个原始图像提取的图像。半导体制造装置的控制单元可以从属于第一组900的核心图像901至909提取特征值,并
且可以将提取的特征值映射到二维(2d)平面以获得用于调节可以获得最佳结果的物镜的工作距离和像散的补偿数据。在示例实施例中,可以将第一组900中的最佳工作距离确定为获得第一组900的其中出现具有最弱方向性的点扩散函数的第六核心图像906的工作距离。
[0131]
属于第二组910的核心图像911至919可以是从通过在x方向上生成-1.2%的像散并且在y方向上生成-1.2%的像散而获得的多个原始图像提取的图像。第二组910中的最佳工作距离可以是获得第七核心图像917的工作距离。另一方面,属于第三组920的核心图像921至929可以是从通过在x方向上生成-1.2%的像散并且在y方向上生成-1.2%的像散而获得的多个原始图像提取的图像。第三组920中的最佳工作距离可以是获得第三核心图像923的工作距离。
[0132]
图21是示出根据示例实施例的控制半导体制造装置的方法的示图。
[0133]
在图21中所示的示例实施例中,水平轴可以表示x方向上的像散,竖直轴可以表示y方向上的像散。参照图21,多个曲线图可以沿着水平轴和竖直轴以矩阵布置。多个曲线图中的每一个可以是其中从多个核心图像提取的特征值被映射到二维(2d)平面的曲线图,如以上参照图16至图18描述的。例如,多个曲线图中的每一个可以包括映射到2d平面的特征值以及从将特征值彼此连接的向量计算的代表向量。
[0134]
多个曲线图中的每一个可以是通过以下操作而生成的曲线图:在其中在物镜中存在与每个曲线图的坐标对应的在x方向上的像散和在y方向上的像散的状态下获得多个原始图像,并且从多个原始图像提取多个核心图像。作为示例,当物镜的像散在x方向上为 1.2%并且在y方向上为 1.2%时,可以如图21中所示的第一曲线图951中一样确定用于调节像散的补偿数据。半导体制造装置的控制单元可以基于第一曲线图951的补偿数据来调节像散,并且可以选择与第一曲线图951中包括的特征值之中的最接近2d平面的原点的特征值对应的工作距离作为物镜的工作距离。
[0135]
在参照第一曲线图951调节物镜的像散和工作距离之后,控制单元可以重新获得多个原始图像,并且可以提取多个核心图像以获得用于调节像散的补偿数据。作为示例,由控制单元从多个重新获得的原始图像和多个核心图像生成的曲线图可以是图21的第二曲线图952。控制单元可以参考第二曲线图952来调节物镜的像散和工作距离,并且可以重新获得多个原始图像。
[0136]
通过重复地执行这样的操作,控制单元可以自动地去除像散,并且可以将物镜的工作距离设定为最佳工作距离。作为示例,由控制单元最终生成以选择物镜的工作距离的曲线图可以是第三曲线图953中的一个。
[0137]
图22是示出根据示例实施例的半导体制造装置的示意图。
[0138]
在图22中所示的示例实施例中,半导体制造装置1000可以是使用电子束的曝光装置系统。半导体制造装置1000可以包括用作发射电子束eb的电子束源的电子枪1010、支撑被施加由电子束eb曝光的抗蚀剂层的衬底1002的台1001、设置在电子枪1010与台1001之间以调节电子束eb的聚焦和像散的透镜单元1020、具有形成电子束eb的截面形状的孔径的孔径系统1030、以及偏转器1040。
[0139]
半导体制造装置1000可以包括调节孔径系统1030中包括的孔径的位置的调节单元1050、测量穿过孔径系统1030的电子束eb的强度的测量单元1060、控制单元1070等。作为示例,控制单元1070可以调节孔径系统1030中包括的孔径的对准状态或者流到透镜单元
1020中存在的线圈的电流,以调节照射到衬底1002的电子束的形状和分布。
[0140]
电子枪1010可以设置在其上支撑有衬底1002的台1001上。电子枪1010可以包括灯丝,并且可以朝向衬底1002照射电子束eb。可以通过内部加速电极来加速从电子枪1010发射的电子束eb。电子枪1010可以包括单个电子枪或多个电子枪。
[0141]
透镜单元1020可以包括从电子枪1010顺序地布置的第一透镜单元1021至第四透镜单元1024。透镜单元1020可以包括聚光透镜和/或投影透镜,并且可以控制或聚焦电子束eb的路径。
[0142]
控制单元1070可以控制流到提供透镜单元1020中的聚光透镜的线圈的电流或流到用于控制像散的消像散器的电流。此外,控制单元1070可以调节工作距离、透镜单元1020与衬底1002之间的间隙。控制单元1070可以自动地且同时地调节影响聚焦的要被优化或改善的工作距离和像散。
[0143]
控制单元1070可以有意地改变工作距离以获得多个原始图像,并且可以从多个原始图像分离多个核心图像。如上所述,可以通过梯度下降方法等来优化或改善用于分离多个核心图像的等式,以获得多个核心图像。
[0144]
控制单元1070可以从多个核心图像提取可以表达与照射到衬底1002的电子束eb的形状对应的点扩散函数的特征值。作为示例,特征值可以包括点扩散函数的长轴和短轴以及倾斜的角度。控制单元1070可以将特征值映射到使用特征值定义的二维(2d)平面,并且可以从将特征值彼此连接的向量生成代表向量,以获得用于调节像散的补偿数据。同时,控制单元1070可以确定可以将电子束eb准确地照射到衬底1002的期望的位置的透镜单元1020的工作距离。因此,控制单元1070可以自动地调节透镜单元1020的工作距离以与焦距匹配,并且可以补偿像散。
[0145]
如上所述,在使用电子束的装置中,可以通过改变透镜单元与物体之间的工作距离来获得多个原始图像,可以从多个原始图像提取表示电子束在物体上的分布的多个核心图像,并且可以使用多个核心图像的特征值来调节透镜单元的聚焦和像散。可以同时地且自动地调节聚焦和像散(其为彼此影响的参数)以改善使用电子束的半导体处理的效率。
[0146]
尽管以上已经示出并描述了示例实施例,但是本领域技术人员将清楚,在不脱离如所附权利要求限定的本发明构思的范围的情况下,可以做出修改和改变。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。