1.本发明涉及一种奶车自动采样系统,属于乳制品采样技术领域。
背景技术:
2.每个乳品厂生产企业对应多个奶源基地的原奶供应,这些原奶通过基地汇总后用奶罐车送达乳品厂,乳品厂在奶罐车抵达后需要对奶品进行采集、鉴定、留样。现有的取样方式为人工携带工具登上奶罐车顶部、开盖、混匀、采集、封装,操作人员登车操作过程中,存在一定的安全隐患,需要做好必要的安全防护工作;每次采样完成后,需要及时对采样工具进行清洗消毒;整个取样操作过程均由人工直接参与,因此操作的规范程度存在主观性,直接影响样品的质量,继而影响样品评价的准确性。
技术实现要素:
3.针对上述现有技术存在的问题,本发明提供一种奶车自动采样系统,该采样系统能够实现对原奶样品的自动混匀取样、灌装以及对采样设备的自动清洗和消毒,提高对原奶样品评价的准确性。
4.为了实现上述目的,本发明提供一种奶车自动采样系统,包括采样平台,还包括采样机装置、导轨装置和采样机器人;所述采样平台设置于待采样奶车通道的一侧,采样机装置和导轨装置均设置在采样平台上,采样机器人与导轨装置之间滑动连接;
5.所述的采样机装置用于存储和灌装样品,并对存储和灌装所使用的设备进行清洗,其包括机体本体、采样罐、接样机构、控制机构、负压机构和清洗机构,机体本体为框架结构,采样罐位于框架结构靠近上部的位置,其下方为接样机构,控制机构位于框架结构靠近下部的位置,负压机构位于采样罐一侧,通过负压管路与采样罐的顶部连通,负压管路上设有与采样罐连通的真空阀和通大气阀;清洗机构通过清洗管路与采样罐的顶部连通;
6.接样机构、负压机构和清洗机构均与控制机构连接;
7.所述导轨装置用于为采样机器人提供滑动动力并进行滑动导向,其设置于采样机装置一侧,包括一对沿采样平台长度方向平行设置的轨道一,采样机器人滑动连接于所述轨道一上;
8.所述采样机器人用于从待采样奶车内采集样品,其包括rgv小车,rgv小车的顶部一侧连接有竖直设置的悬臂架,所述悬臂架与伸出rgv小车一侧的x轴模组一端连接,x轴模组横向设置,其上端面开设有滑轨二,滑轨二内滑动设置有滑块一,所述滑块一与z轴采样机械手连接;驱动单元一通过传动机构驱动滑块一。
9.进一步地,所述采样罐包括罐体,罐体上部设有罐盖,罐盖上设有一端与罐体内部连通、另一端分别与负压管路、清洗管路、料位检测传感器和压力检测传感器连接的负压接口、清洗接口、料位检测接口和压力检测接口,位于罐体内部的清洗阀通过清洗接口与清洗管路连通;
10.罐体底板上开设有排奶通孔,以排奶通孔为中心环设有多个灌装通孔,排奶通孔
和灌装通孔下方分别与位于采样罐下方的排奶锥斗和灌装锥斗连通,所述排奶锥斗和灌装锥斗上分别安装有排空阀和灌装阀;罐体底板上还开设有奶样输入口,位于罐体下方的取奶管一端通过取奶阀与罐体内部连通。
11.进一步地,所述接样机构包括托架,托架的一端开设有与排奶锥斗和灌装锥斗分别对应设置的样品瓶放置槽;与样品瓶放置槽相对的托架另一端设有防溅槽;
12.样品瓶放置槽两侧的托架分别通过铰接于其所在侧的水平伸缩油缸与驱动头连接;托架底部两侧分别设有延伸至驱动头底部的条形滑块,所述条形滑块与设置在采样罐下方机体本体上的滑轨一滑动连接。
13.进一步地,所述z轴采样机械手垂直于x轴模组设置,其包括位于上端的连接板,所述连接板以x轴模组为中心的一侧下端面与x轴模组的滑块一固定连接,另一侧下端面设有轨道二,轨道二上滑动连接有滑块二,滑块二与驱动单元二连接,滑块二同时还与位于其下方的交叉板伸缩单元的上端铰接连接,驱动单元二还通过纵向连接杆与交叉板伸缩单元连接,取奶杆的上端与交叉板伸缩单元下端连接,伸缩导向杆上端固定在连接板下端,下端通过连接件与取奶杆连接;取奶杆穿设于取奶管另一端的下部管路内,在穿出于取奶管的取奶杆底部设有热电偶。
14.进一步地,所述交叉板伸缩单元包括多个易变形平行四边形交叉板,各上下相邻的交叉板之间铰接连接,在驱动单元二的驱动作用下进行伸缩变形;所述取奶管的内径大于取奶杆的外径,在热电偶上方处二者通过卡箍进行固定;所述热电偶的线缆通过取奶杆的侧部封闭夹层穿出。
15.进一步地,所述机体本体内设置两套采样罐、接样机构、负压机构和清洗机构,其中两套负压机构共用一个真空泵。
16.本系统通过设置采样平台、采样机装置、导轨装置和采样机器人,采样平台设置于待采样奶车通道的一侧,采样机装置和导轨装置均设置在采样平台上,采样机器人与导轨装置之间滑动连接,采样机装置通过启动负压机构对采样罐内部进行抽气,在达到设定负压后,停止抽气,同时通过采样机器人对待采样奶车车罐内的原奶进行混合并抽取原奶样品,当采样罐内的原奶样品达到设定高度后,使采样罐连通大气,罐内外压力平衡后,多余奶样在重力作用下倒流返回奶车车罐,此时采样机装置的采样罐内存有设定容量的奶样;将接样结构推送至采样罐下方,使采样罐内的奶样灌装进入样品瓶,完成取样工作;取样完成后,清洗机构对采样机装置中的采样罐以及与采样罐连接的奶样经过的管路进行清洗消毒,为进入下一次的取样工作做准备。本发明实现了对原奶样品的自动混匀取样、灌装以及对采样设备的自动清洗和消毒,提高了对原奶样品评价的准确性,降低了工人的劳动强度,保证了作业的安全。
附图说明
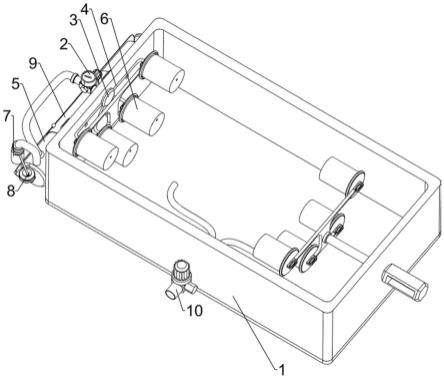
17.图1是本发明的结构示意图;
18.图2是采样机装置的前视结构示意图;
19.图3是采样机装置的后视结构示意图;;
20.图4是图1中a处的结构放大图;
21.图5是采样罐的结构示意图;
22.图6是接样机构的结构示意图;
23.图7是负压机构的结构示意图;
24.图8是采样机器人的结构示意图;
25.图9是z轴采样机械手的结构示意图。
26.图中:1、采样平台,2、采样机装置,201、机体本体,201-1、滑轨一;
27.202、采样罐,202-1、罐体,202-2、罐盖,202-3、料位检测传感器,202-4、压力检测传感器,202-5、负压接口,202-6、清洗接口,202-7、料位检测接口,202-8、压力检测接口,202-9、清洗阀,202-10、排奶通孔,202-11、灌装通孔,202-12、排奶锥斗,202-13、灌装锥斗,202-14、排空阀,202-15、灌装阀,202-16、取奶管,202-17、取奶阀;
28.203、接样机构,203-1、托架,203-2、样品瓶放置槽,203-3、防溅槽,203-4、水平伸缩油缸,203-5、驱动头,203-6、条形滑块;
29.204、控制机构,
30.205、负压机构,205-1、负压管路,205-2、真空阀,205-3、通大气阀,205-4、真空泵;
31.206、清洗机构;
32.3、导轨装置,301、轨道一;
33.4、采样机器人,401、rgv小车,402、悬臂架,
34.403、x轴模组,403-1、滑轨二,403-2、滑块一,
35.404、z轴采样机械手,404-1、连接板,404-2、轨道二,404-3、滑块二,404-4、驱动单元二,404-5、交叉板伸缩单元,404-6、纵向连接杆,404-7、取奶杆,404-8、伸缩导向杆,404-9、热电偶;
36.5、待采样奶车。
具体实施方式
37.下面结合附图对本发明作进一步说明。
38.如图1所示,一种奶车自动采样系统,包括采样平台1,还包括采样机装置2、导轨装置3和采样机器人4;所述采样平台1设置于待采样奶车5通道的一侧,采样机装置2和导轨装置3均设置在采样平台1上,采样机器人4与导轨装置3之间滑动连接;
39.如图2、图3、图7所示,采样机装置2用于存储和灌装样品,并对存储和灌装所使用的设备进行清洗,其包括机体本体201、采样罐202、接样机构203、控制机构204、负压机构205和清洗机构206,机体本体201为框架结构,采样罐202位于框架结构靠近上部的位置,其下方为接样机构203,控制机构204位于框架结构靠近下部的位置,负压机构205位于采样罐202一侧,通过负压管路205-1与采样罐的顶部连通,负压管路205-1上设有与采样罐202连通的真空阀205-2和通大气阀205-3;清洗机构206通过清洗管路2与采样罐202的顶部连通;
40.接样机构203、负压机构205和清洗机构206均与控制机构204连接;
41.如图1所示,所述导轨装置3用于为采样机器人4提供滑动动力并进行滑动导向,其设置于采样机装置2一侧,包括一对沿采样平台1长度方向平行设置的轨道一301,采样机器人4滑动连接于所述轨道一301上;
42.如图8所示,所述采样机器人4用于从待采样奶车5内采集样品,其包括rgv小车401,rgv小车401的顶部一侧连接有竖直设置的悬臂架402,所述悬臂架402与伸出rgv小车
401一侧的x轴模组403一端连接,x轴模组403横向设置,其上端面开设有滑轨二403-1,滑轨二403-1内滑动设置有滑块一403-2,所述滑块一403-2与z轴采样机械手404连接;驱动单元一405通过传动机构驱动滑块一403-2。
43.如图5所示,作为一种优选的实施方式,所述采样罐202包括罐体202-1,罐体202-1上部设有罐盖202-2,罐盖202-2上设有一端与罐体内部连通、另一端分别与负压管路、清洗管路、料位检测传感器202-3和压力检测传感器202-4连接的负压接口202-5、清洗接口202-6、料位检测接口202-7和压力检测接口202-8,位于罐体202-1内部的清洗阀202-9通过清洗接口202-6与清洗管路连通;
44.罐体底板上开设有排奶通孔202-10,以排奶通孔202-10为中心环设有多个灌装通孔202-11,排奶通孔202-10和灌装通孔202-11下方分别与位于采样罐下方的排奶锥斗202-12和灌装锥斗202-13连通,所述排奶锥斗202-12和灌装锥斗202-13上分别安装有排空阀202-14和灌装阀202-15;罐体底板上还开设有奶样输入口,位于罐体下方的取奶管202-16一端通过取奶阀202-17与罐体内部连通。
45.如图6所示,作为一种优选的实施方式,所述接样机构203包括托架203-1,托架203-1的一端开设有与排奶锥斗202-12和灌装锥斗202-13分别对应设置的样品瓶放置槽203-2;与样品瓶放置槽203-2相对的托架另一端设有防溅槽203-3;
46.如图6和图4所示,样品瓶放置槽203-2两侧的托架203-1分别通过铰接于其所在侧的水平伸缩油缸203-4与驱动头203-5连接;托架底部两侧分别设有延伸至驱动头底部的条形滑块203-6,所述条形滑块203-6与设置在采样罐202下方机体本体201上的滑轨一201-1滑动连接。
47.如图8和图9所示,作为一种优选的实施方式,所述z轴采样机械手404垂直于x轴模组403设置,其包括位于上端的连接板404-1,所述连接板404-1以x轴模组403为中心的一侧下端面与x轴模组的滑块一403-2固定连接,另一侧下端面设有轨道二404-2,轨道二404-2上滑动连接有滑块二404-3,滑块二404-3与驱动单元二404-4连接,滑块二404-3同时还与位于其下方的交叉板伸缩单元404-5的上端铰接连接,驱动单元二404-4还通过纵向连接杆404-6与交叉板伸缩单元404-5连接,取奶杆404-7的上端与交叉板伸缩单元404-5下端连接,伸缩导向杆404-8上端固定在连接板404-1下端,下端通过连接件与取奶杆404-7连接;取奶杆404-7穿设于取奶管202-16另一端的下部管路内,在穿出于取奶管202-16的取奶杆404-7底部设有热电偶404-9,所述热电偶404-9用于测量奶温。
48.作为一种优选的实施方式,所述交叉板伸缩单元404-5包括多个易变形平行四边形交叉板,各上下相邻的交叉板之间铰接连接,在驱动单元二404-4的驱动作用下进行伸缩变形;所述取奶管202-16的内径大于取奶杆404-7的外径,在热电偶404-9上方处二者通过卡箍进行固定;为了避免线缆接触奶液,所述热电偶的线缆通过取奶杆的侧部封闭夹层穿出。
49.如图7所示,为了提高采样效率,所述机体本体201内设置两套采样罐202、接样机构203、负压机构205和清洗机构206,两套采样装置轮流采样和清洗,大大提高采样效率;为了尽可能减少设备的空间占用,其中两套负压机构共用一个真空泵205-4。
50.采样时,将待采样奶车停靠于靠近采样平台的道路一侧,根据给定的待采样奶车的采样口坐标及原奶液面高度,启动rgv小车在导轨装置上进行滑动,直至滑动至合适的位
置停下,通过x轴模组的滑块在x轴模组上端面的滑轨二内进行滑动,调节z轴采样机械手与待采样奶车采样口的水平距离,直至z轴采样机械手位于采样口上方,停止x轴模组的滑块滑动,启动驱动单元二,横向上驱动滑块二带动交叉板伸缩单元沿连接板运动,进一步对焦采样口,纵向上通过纵向连接杆驱动交叉板伸缩单元沿伸缩导向杆进行伸缩运动,直至将取奶杆插入原奶液面以下,打开气吹搅拌阀对奶液进行搅拌,完成取样准备;
51.打开取奶阀,负压管路通过真空阀将采样罐内部的空气抽出,当达到设定负压后,在控制机构的控制下,负压机构停止抽气;此时,待采样奶车奶罐内的原奶在负压作用下经取奶管被吸进采样罐,当料位检测传感器检测到采样罐内的奶样液面达到设定的高度后,控制机构关闭取奶阀,通过驱动头驱动托架将置于样品瓶放置槽内的样品瓶推至各自对应的灌装锥斗下方,打开灌装阀进行灌装;完成灌装后,打开排空阀和通大气阀,采样罐内多余的奶排出。
52.启动清洗机构,在增压泵的作用下分别对取奶管、取奶杆及采样罐通过清洗管路通入清洗消毒液进行彻底清洗,准备进入下一次的取样工作。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。