1.本发明涉及医疗器械设备技术领域,具体涉及一种肌肉组织氧饱和度监护仪传感器固定装置。
背景技术:
2.随着麻醉学的进步与发展,人们对手术过程中的监测技术要求日益增高,近红外光谱法组织氧饱和度监测仪可以监测肌肉组织氧的供需平衡,如果用于手术之中,可以更好地改善围术期预后,由于此类监护仪传感器在工作中需要与皮肤贴合紧密,且需避光。
3.在现有技术中,通常采用胶带粘贴的方式将氧饱和度监护仪传感器固定在患者皮肤上,这种固定方式存在弊端,在手术的过程中传感器很容易因为固定不牢固而脱落,目前市面上没有一种专门用于固定肌肉组织氧饱和度监测仪传感器的固定装置并且手术持续过程一般都比较长,而患者在麻醉的作用下感知能力弱化,固定装置的舒适度与稳定性尤其重要。
技术实现要素:
4.本发明的目的在于提供一种肌肉组织氧饱和度监护仪传感器固定装置,解决以下技术问题:
5.采用胶带粘贴的方式将氧饱和度监护仪传感器固定在患者皮肤上,这种固定方式存在弊端,在手术的过程中传感器很容易因为固定不牢固而脱落。
6.本发明的目的可以通过以下技术方案实现:
7.一种肌肉组织氧饱和度监护仪传感器固定装置,包括支撑框体,所述支撑框体两侧相对开设有用于承载手臂的u型槽,其中,所述支撑框体内上相对滑动布设u型板,所述u型板与布设在支撑框体中的驱动机构连接;
8.两侧所述u型板相靠近的一侧布设有用于对患者手臂进行限位的限位座,两侧限位座相靠近的一侧为弧形端面,支撑框体内还布设有用于对手臂进行承载的支座,支座位于两侧u型槽之间;
9.限位座上布设有定位杆,所述定位杆通过检测杆与检测传感器端头连接,检测传感器端头通过检测杆以及线路与外侧控制器连接。
10.优选的,所述驱动机构包括转动布设于支撑框体中的螺杆,螺杆端部设有手柄,其中,螺杆上相对螺旋套设有与u型板固定连接的螺母。
11.优选的,所述限位座与布设在u型板间的缓冲机构连接,缓冲机构包括与限位座固定连接的缓冲杆,所述缓冲杆与布设在u型板外侧的筒体滑动连接,其中,缓冲杆上设有缓冲弹簧。
12.优选的,所述限位座的弧形端面上设有缓冲气囊,其中,所述筒体内设有气腔,所述气腔通过气管与缓冲气囊连接。
13.优选的,所述定位杆与限位座滑动连接,所述u型板中布设有推动机构,推动机构
用于驱动定位杆朝向患者手臂方向移送,以使检测传感器端头与患者手臂贴合。
14.优选的,定位杆上设有复位弹簧,其中,推动机构包括布设于u型板上的倾斜座,所述定位杆上设有滚轮。
15.优选的,所述定位杆内开设有通槽,所述检测杆滑动布设于通槽中,其中,通槽中还设有与检测杆连接的伸缩弹簧。
16.优选的,所述支座上相对开设有多组气孔,气孔与输气机构连接,所述支座上还设有温度传感器。
17.本发明的有益效果:
18.(1)本发明通过驱动机构驱动两侧u型板在支撑框体上移送,u型板在相互靠近的过程中驱动限位座的弧形端面与患者手臂接触,同时使得所述检测传感器端头与患者手臂贴合,在此过程中,控制器通过控制线路以及检测杆启动检测传感器端头,对患者的肌肉组织氧饱和度进行实时监测,相较于现有采用胶带或者绑缚缠绕的方式固定检测传感器端头,稳定性更高,且患者手臂完全处于支撑框体上的封闭空腔中,不会出现固定不稳固的现象,在拆卸时,驱动机构驱动u型板在支撑框体上反向移送即可,操作非常方便;
19.(2)本发明限位座在驱动缓冲杆朝向筒体移送的过程中,缓冲杆同步将气腔中的空气通过气管输入至缓冲气囊中,进而使得缓冲气囊膨胀与患者手臂的贴合紧密度更高,在拆卸的过程中,缓冲弹簧可以起到驱动限位座复位的效果。
20.(3)本发明在使用的过程中可以将患者手臂或下肢完全治愈支撑框体上的封闭空腔中,实现避光的效果,进而避免外部光线对检测传感器端头造成影响,检测精度更高;
21.(4)本发明不需要采用传统的胶带连接方式对检测传感器端头进行固定,进而在使用的过程中,也可以避免撕胶带给患者皮肤带来的损伤,保护效果更好。
附图说明
22.下面结合附图对本发明作进一步的说明。
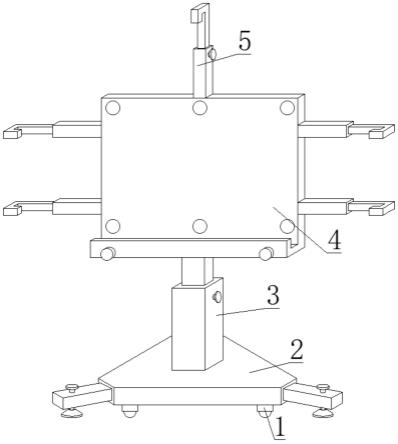
23.图1是本发明一种肌肉组织氧饱和度监护仪传感器固定装置的结构示意图一;
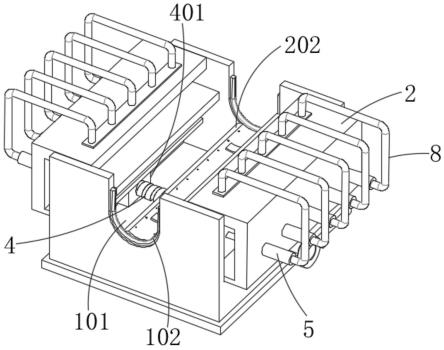
24.图2是本发明一种肌肉组织氧饱和度监护仪传感器固定装置的结构示意图二;
25.图3是本发明一种肌肉组织氧饱和度监护仪传感器固定装置的结构示意图三;
26.图4是本发明一种肌肉组织氧饱和度监护仪传感器固定装置中限位座的结构示意图;
27.图5是本发明一种肌肉组织氧饱和度监护仪传感器固定装置中u型板的结构示意图;
28.图6是本发明一种肌肉组织氧饱和度监护仪传感器固定装置中检测杆的结构示意图。
29.图中:1、支撑框体;2、u型板;3、限位座;4、螺杆;5、筒体;6、温度传感器;7、气孔;8、气管;9、定位杆;101、u型槽;102、软垫;201、倾斜座;202、支座;301、缓冲杆;302、缓冲弹簧;303、缓冲气囊;401、螺母;402、手柄;501、气腔;901、检测传感器端头;902、检测杆;903、伸缩弹簧;904、通槽;905、复位弹簧;906、滚轮。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
31.请参阅图1-图2所示,本发明为一种肌肉组织氧饱和度监护仪传感器固定装置,包括支撑框体1,所述支撑框体1两侧相对开设有用于承载手臂的u型槽101,其中,所述支撑框体1内上相对滑动布设u型板2,所述u型板2与布设在支撑框体1中的驱动机构连接,在本实施方式中,通过驱动机构驱动u型板2在支撑框体1上移送,以实现对两侧u型板2的位置调节,在检测的过程中,u型板2顶部贴合,进而可以对支撑框体1上方进行密封,使得患者手臂完全位于支撑框体1中;
32.此外,在实际应用过程中,不仅限于作用于患者手臂,还可以对患者下肢进行固定,应用对象可基于实际手术过程进行改变;
33.两侧所述u型板2相靠近的一侧布设有用于对患者手臂进行限位的限位座3,两侧限位座3相靠近的一侧为弧形端面,支撑框体1内还布设有用于对手臂进行承载的支座202,支座202位于两侧u型槽101之间,可以说明的是,患者将手臂置于支座202上后,两侧限位座3同时朝向支座202方向移动,限位座3通过与支座202配合实现对手臂的限位;
34.所述限位座3上布设有定位杆9,所述定位杆9通过检测杆902与检测传感器端头901连接,检测传感器端头901通过检测杆902以及线路与外侧控制器连接,在本实施方式中,该检测传感器端头901由两只发光管和一只光电管组成,在外科手术中或危重病人的监护中可以及时了解血液中含量;具体的,在本实施例中,将该支撑框体1置于任一承载台上,患者手臂穿插u型槽101搭在支座202上,而后通过驱动机构驱动两侧u型板2在支撑框体1上移送,u型板2在相互靠近的过程中驱动限位座3的弧形端面与患者手臂接触,同时使得所述检测传感器端头901与患者手臂贴合,在此过程中,控制器通过控制线路以及检测杆902启动检测传感器端头901,对患者的肌肉组织氧饱和度进行实时监测,相较于现有采用胶带或者绑缚缠绕的方式固定检测传感器端头901,本发明的固定装置稳定性更高,且患者手臂完全处于支撑框体1上的封闭空腔中,不会出现固定不稳固的现象,在拆卸时,驱动机构驱动u型板2在支撑框体1上反向移送即可,操作非常方便;
35.作为本发明实施例进一步的方案,所述驱动机构包括转动布设于支撑框体1中的螺杆4,螺杆4端部设有手柄402,其中,螺杆4两侧螺纹旋向相反,螺杆4上相对螺旋套设有与u型板2固定连接的螺母401;
36.具体的,在本实施例中,在驱动u型板2于支撑框体1上移送的过程中,通过转动手柄402驱动螺杆4转动,螺母401在螺杆4上运动的过程中驱动u型板2移动。
37.请参阅图3,所述限位座3与布设在u型板2间的缓冲机构连接,缓冲机构包括与限位座3固定连接的缓冲杆301,所述缓冲杆301与布设在u型板2外侧的筒体5滑动连接,其中,缓冲杆301上设有缓冲弹簧302;可以说明的是,两侧u型板2在相互靠近的过程中,限位座3的弧形端面首先与患者手臂接触,随着u型板2继续运动,限位座3驱动缓冲杆301插接于筒体5中,在此过程中,缓冲弹簧302收缩产生弹力,实现缓冲效果,避免限位座3对手臂造成挤压;
38.更进一步的,所述限位座3的弧形端面上设有缓冲气囊303,其中,所述筒体5内设有气腔501,所述气腔501通过气管8与缓冲气囊303连接;可以说明的是,限位座3在驱动缓冲杆301朝向筒体5移送的过程中,缓冲杆301同步将气腔501中的空气通过气管8输入至缓冲气囊303中,进而使得缓冲气囊303膨胀与患者手臂的贴合紧密度更高,可以理解的,在拆卸的过程中,缓冲弹簧302可以起到驱动限位座3复位的效果;
39.作为本发明实施例进一步的方案,所述定位杆9与限位座3滑动连接,所述u型板2中布设有推动机构,推动机构用于驱动定位杆9朝向患者手臂方向移送,以使检测传感器端头901与患者手臂贴合;
40.请参阅图4,定位杆9上设有复位弹簧905,其中,推动机构包括布设于u型板2上的倾斜座201,所述定位杆9上设有滚轮906,可以说明的是,限位座3在朝向筒体5方向移送的过程中,定位杆9上滚轮906在倾斜座201的倾斜面上滚动的过程中,同步驱动定位杆9朝向患者手臂方向移动,以使检测传感器端头901与患者手臂贴合;
41.可以说明的是,请参阅图5,所述定位杆9内开设有通槽904,所述检测杆902滑动布设于通槽904中,其中,通槽904中还设有与检测杆902连接的伸缩弹簧903;可以说明的是,定位杆9在朝向患者手臂方向移送的过程中,检测传感器端头901首先与患者手臂接触,而后检测传感器端头901驱动检测杆902在通槽904中滑动,检测杆902挤压伸缩弹簧903收缩产生弹力,进而实现缓冲的效果,避免检测传感器端头901造成挤压损伤;
42.请参阅图6,作为本发明实施例进一步的方案,所述支座202上相对开设有多组气孔7,气孔7与输气机构连接,所述支座202上还设有温度传感器6;
43.更进一步的,输气机构包括与电阻加热器连接的风机,风机通过管道与气孔7连接,温度传感器6在肌肉组织氧饱和度监测的过程中,通过温度传感器6对患者手臂处的温度进行实时监测,当温度过低时,启动风机与电阻加热器,风机通过管道将热空气吹向气孔7,进而实现对患者手臂的升温加热,提高了舒适度。
44.此外,所述u型槽101的槽壁上设有软垫102,使得患者手臂在穿插于u型槽101中时,舒适度更高,对患者手臂进行保护。
45.本发明的工作原理:将该支撑框体1置于任一承载台上,患者手臂穿插u型槽101搭在支座202上,通过转动手柄402驱动螺杆4转动,螺母401在螺杆4上运动的过程中驱动u型板2移动,驱动两侧u型板2在支撑框体1上移送,u型板2在相互靠近的过程中驱动限位座3的弧形端面与患者手臂接触,两侧u型板2在相互靠近的过程中,限位座3的弧形端面首先与患者手臂接触,随着u型板2继续运动,限位座3驱动缓冲杆301插接于筒体5中,在此过程中,缓冲弹簧302收缩产生弹力,实现缓冲效果,缓冲杆301同步将气腔501中的空气通过气管8输入至缓冲气囊303中,限位座3在朝向筒体5方向移送的过程中,定位杆9上滚轮906在倾斜座201的倾斜面上滚动的过程中,同步驱动定位杆9朝向患者手臂方向移动,以使检测传感器端头901与患者手臂贴合,在此过程中,控制器通过控制线路以及检测杆902启动检测传感器端头901,对患者的肌肉组织氧饱和度进行实时监测。
46.在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以及特定的方位构造和操作,因此,不能理解为对本发明的限制。此外,“第一”、“第二”仅由于描述目的,且不能理解为指示或暗示
相对重要性或者隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个该特征。本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
47.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”“相连”“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
48.以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。