1.本发明涉及实训套件技术领域,特别涉及基于工业互联网技术一体化实训套件。
背景技术:
2.工业互联网是新一代信息通信技术与工业经济深度融合的新型基础设施、应用模式和工业生态,通过对人、机、物、系统等的全面连接,构建起覆盖全产业链、全价值链的全新制造和服务体系,为工业乃至产业数字化、网络化、智能化发展提供了实现途径,是第四次工业革命的重要基石,而其在进行学习过程中,为了更加良好的对理论与实践进行结合,就需要用到相应的实训套件来进行实训。
3.实训套件在实际应用过程中存在着:
4.实训套件在进行使用时,多为固定不动的结构,而由于实训套件中各个模块之间的高度并不相同,使得操作者需要反复的对自身位置进行调整后才能进行调节使用,进而降低了对实训套件的使用效率,存在着局限性。
5.有鉴于此,针对现有的结构及缺失予以研究改良,提供基于工业互联网技术一体化实训套件。
技术实现要素:
6.本发明提供了基于工业互联网技术一体化实训套件,解决了由于实训套件中各个模块之间的高度并不相同,使得操作者需要反复的对自身位置进行调整后才能进行调节使用,进而降低了对实训套件的使用效率,存在着局限性的问题。
7.本发明提供了基于工业互联网技术一体化实训套件,具体包括:底座和承载架,所述底座的主体为矩形结构,底座的底端面四角位置均安装有万向轮,底座与万向轮共同组成了支撑结构,底座的前端安装有风机a,且底座的底端面上呈环形阵列安装有风管,风管通过设置在底座前端的风机a出气,所述承载架的后侧安装有监控器,监控器用于监控画面,且承载架的后侧开设有风槽,该风槽与设置在承载架前端的风机b相连接,安装架的后侧固定连接有支撑架,支撑架的前端固定连接有电磁块。
8.进一步的,所述安装座的内部安装有支架,电机a用于调节支架的角度,支架的内部开设有纵向槽,该纵向槽内部滑动连接有滑块,滑块共设有两处,且两处滑块的前端均固定连接有齿条。
9.进一步的,所述底座的顶端面上固定连接有安装座,安装座共设有两处,且两处安装座分别固定连接在底座顶端面的左右两侧位置,并且两处安装座的外侧均安装有电机a。
10.进一步的,所述支架的外侧安装有电机b,电机b的输出端上安装有齿轮,齿轮与固定连接在滑块前端的齿条相啮合,安装架的顶端固定连接有中控器,中控器的前端安装有报警器。
11.进一步的,所述中控器与报警器电性相连接,安装架中所开设的凹槽内部吸附有磁盘,磁盘的前端固定连接有插柱,磁盘与插柱共同组成了对互联网模块的连接结构。
12.进一步的,两处所述滑块的内侧固定连接有安装架,安装架的内部呈矩形阵列开设有凹槽,安装架中所开设的凹槽用于安装互联网模块,支架的前端固定连接有支架。
13.进一步的,所述底座的内部安装有电机c,电机c的顶端输出端安装有台座,台座的顶端固定连接有导架,导架共设有两处,且两处导架分别固定连接在台座顶端面的前后两侧位置,并且两处导架的内侧安装有导轨,导轨的前后两侧均开设有横向槽,导轨的左侧安装有电机d,电机d的右侧安装有螺杆,电机d用于驱动螺杆转动,导架的内部开设有与螺杆相匹配的螺孔,导轨的顶端固定连接有安装板,安装板的前端安装有电机e,电机e的后侧输出端上安装有滚轮,滚轮的外侧缠绕有牵引绳,导轨的内部滑动连接有滑动座,滑动座的顶端固定连接有承载座,承载座的左右两侧均固定连接有挂钩。
14.进一步的,所述支架的内部滑动连接有底板,且底板与支架之间还安装有弹簧,底板与电磁块相匹配,底板的前端面上呈矩形阵列安装有电动推杆b,电动推杆b的前端安装有接线端,接线端与互联网模块相连接。
15.进一步的,所述安装架的前端开设有纵向槽,该纵向槽内部安装有电动推杆a,电动推杆a的顶端安装有移动块,移动块的前端固定连接有承载架,承载架的前端安装有风机b。
16.与现有技术相比,本发明具有如下有益效果:
17.1、当操作者处于站立状态并对设置在安装架内部的实训模块进行操控时,若需要对安装架中位于底端的实训模块进行操控时,可以通过启动安装在支架外侧的电机b对齿轮进行转动驱动,并通过齿轮与固定连接在滑块前端的齿条进行啮合,并同步的带动着滑块以及安装架沿着支架中所开设的纵向槽向上移动,以实现自动化的带动着安装在安装架中的实训模块进行自动化的升降,以供使用者进行快速操控,进而提高对实训设备的使用效率。
18.2、当操作者对当前设置在安装架中的实训模块操作完成需要进行验收时,则可以通过启动安装在安装架中的电动推杆a对移动块的高度进行调整,而当移动块进行移动时,可以同步的带动着承载架及后侧所安装的监控器进行移动,通过监控器来对当前设置在安装架中的各个实训模块的连线状态进行拍摄并与预先设定好的数据进行对比,然后再通过中控器监控对比后自动化的对当前操作者的实训情况进行识别判断,进而达到更加实用的目的。
19.3、当操作者对设置在安装架中的实训模块进行操控时,设置在安装架顶端的中控器可以对接线以及操作的状态进行持续监测,若监测到使用者的操作存在着失误时,则可以同步的启动安装在中控器前端的报警器进行报警,并同步的对设置在相应误操作后侧的电动推杆b进行启动,通过电动推杆b将接线端向后侧进行拉扯,使得接线端与设置在安装架中的实训模块进行主动化的脱离断电操作,使得其可以有效的避免因使用者的误操作对实训设备造成损坏的问题出现。
20.4、当需要对外部的实训设备进行配合使用时,可以通过启动安装在底座中的电机c对台座进行翻转驱动,并使得导轨朝向需要安装的设备一侧进行放置即可,然后再同步的将需要进行牵引的设备放置到承载座之上并进行固定,然后再通过启动安装在安装板外侧的电机e对滚轮进行转动驱动,通过滚轮对牵引绳的收卷来利用其与挂钩的连接带动着承载座带动着设备一同进行移动,使得设备可以更加便利的运动到底座上方并进行自动化的
定位以及限位工作,进而达到更加方便于多种设备进行配合使用的目的。
附图说明
21.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
22.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
23.在附图中:
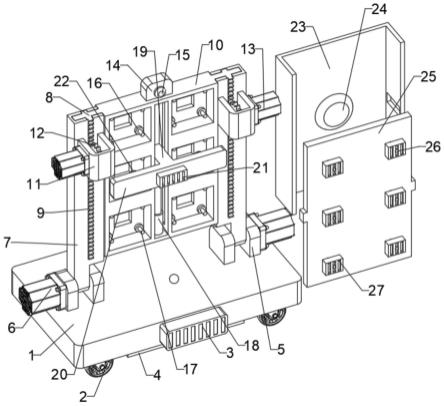
24.图1示出了根据本发明实施例实训套件的部分结构剖切且拆分状态下的前侧视结构示意图;
25.图2示出了根据本发明实施例实训套件的部分结构剖切且拆分状态下的仰侧视结构示意图;
26.图3示出了根据本发明实施例实训套件的前侧视结构示意图;
27.图4示出了根据本发明实施例实训套件的前视结构示意图;
28.图5示出了根据本发明实施例实训套件的支撑架至接线端展示结构示意图;
29.图6示出了根据本发明实施例实训套件的电动推杆a至监控器展示结构示意图;
30.图7示出了根据本发明实施例实训套件的图2中a处放大结构示意图;
31.图8示出了根据本发明实施例实训套件的图2中b处放大结构示意图。
32.图9示出了根据本发明实施例实训套件的系统结构示意图。
33.附图标记列表
34.1、底座;2、万向轮;3、风机a;4、风管;5、安装座;6、电机a;7、支架;8、滑块;9、齿条;10、安装架;11、装配架;12、齿轮;13、电机b;14、中控器;15、报警器;16、磁盘;17、插柱;18、电动推杆a;19、移动块;20、承载架;21、风机b;22、监控器;23、支撑架;24、电磁块;25、底板;26、电动推杆b;27、接线端;28、电机c;29、台座;30、导架;31、导轨;32、电机d;33、螺杆;34、安装板;35、电机e;36、滚轮;37、牵引绳;38、滑动座;39、承载座;40、挂钩。
具体实施方式
35.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
36.实施例:
37.如附图1至附图9所示:
38.本发明提供基于工业互联网技术一体化实训套件,包括有底座1和承载架20,底座1的主体为矩形结构,底座1的底端面四角位置均安装有万向轮2,底座1与万向轮2共同组成了支撑结构,底座1的前端安装有风机a3,且底座1的底端面上呈环形阵列安装有风管4,风管4通过设置在底座1前端的风机a3出气,承载架20的后侧安装有监控器22,监控器22用于监控画面,且承载架20的后侧开设有风槽,该风槽与设置在承载架20前端的风机b21相连接,安装架10的后侧固定连接有支撑架23,支撑架23的前端固定连接有电磁块24,支撑架23的内部滑动连接有底板25,且底板25与支撑架23之间还安装有弹簧,底板25与电磁块24相匹配,底板25的前端面上呈矩形阵列安装有电动推杆b26,电动推杆b26的前端安装有接线端27,接线端27与互联网模块相连接,当操作者对当前设置在安装架10中的实训模块操作
完成需要进行验收时,则可以通过启动安装在安装架10中的电动推杆a18对移动块19的高度进行调整,而当移动块19进行移动时,可以同步的带动着承载架20及后侧所安装的监控器22进行移动,通过监控器22来对当前设置在安装架10中的各个实训模块的连线状态进行拍摄并与预先设定好的数据进行对比,然后再通过中控器14监控对比后自动化的对当前操作者的实训情况进行识别判断,进而达到更加实用的目的。
39.其中,底座1的顶端面上固定连接有安装座5,安装座5共设有两处,且两处安装座5分别固定连接在底座1顶端面的左右两侧位置,并且两处安装座5的外侧均安装有电机a6,安装座5的内部安装有支架7,电机a6用于调节支架7的角度,支架7的内部开设有纵向槽,该纵向槽内部滑动连接有滑块8,滑块8共设有两处,且两处滑块8的前端均固定连接有齿条9,当操作者处于站立状态并对设置在安装架10内部的实训模块进行操控时,若需要对安装架10中位于底端的实训模块进行操控时,可以通过启动安装在支架7外侧的电机b13对齿轮12进行转动驱动,并通过齿轮12与固定连接在滑块8前端的齿条9进行啮合,并同步的带动着滑块8以及安装架10沿着支架7中所开设的纵向槽向上移动,以实现自动化的带动着安装在安装架10中的实训模块进行自动化的升降,以供使用者进行快速操控,进而提高对实训设备的使用效率。
40.其中,两处滑块8的内侧固定连接有安装架10,安装架10的内部呈矩形阵列开设有凹槽,安装架10中所开设的凹槽用于安装互联网模块,支架7的前端固定连接有装配架11,支架7的外侧安装有电机b13,电机b13的输出端上安装有齿轮12,齿轮12与固定连接在滑块8前端的齿条9相啮合,安装架10的顶端固定连接有中控器14,中控器14的前端安装有报警器15,当操作者对设置在安装架10中的实训模块进行操控时,设置在安装架10顶端的中控器14可以对接线以及操作的状态进行持续监测,若监测到使用者的操作存在着失误时,则可以同步的启动安装在中控器14前端的报警器15进行报警,并同步的对设置在相应误操作后侧的电动推杆b26进行启动,通过电动推杆b26将接线端27向后侧进行拉扯,使得接线端27与设置在安装架10中的实训模块进行主动化的脱离断电操作,使得其可以有效的避免因使用者的误操作对实训设备造成损坏的问题出现。
41.其中,中控器14与报警器15电性相连接,安装架10中所开设的凹槽内部吸附有磁盘16,磁盘16的前端固定连接有插柱17,磁盘16与插柱17共同组成了对互联网模块的连接结构,安装架10的前端开设有纵向槽,该纵向槽内部安装有电动推杆a18,电动推杆a18的顶端安装有移动块19,移动块19的前端固定连接有承载架20,承载架20的前端安装有风机b21。
42.其中,底座1的内部安装有电机c28,电机c28的顶端输出端安装有台座29,台座29的顶端固定连接有导架30,导架30共设有两处,且两处导架30分别固定连接在台座29顶端面的前后两侧位置,并且两处导架30的内侧安装有导轨31,导轨31的前后两侧均开设有横向槽,导轨31的左侧安装有电机d32,电机d32的右侧安装有螺杆33,电机d32用于驱动螺杆33转动,导架30的内部开设有与螺杆33相匹配的螺孔,导轨31的顶端固定连接有安装板34,安装板34的前端安装有电机e35,电机e35的后侧输出端上安装有滚轮36,滚轮36的外侧缠绕有牵引绳37,导轨31的内部滑动连接有滑动座38,滑动座38的顶端固定连接有承载座39,承载座39的左右两侧均固定连接有挂钩40,当需要对外部的实训设备进行配合使用时,可以通过启动安装在底座1中的电机c28对台座29进行翻转驱动,并使得导轨31朝向需要安装
的设备一侧进行放置即可,然后再同步的将需要进行牵引的设备放置到承载座39之上并进行固定,然后再通过启动安装在安装板34外侧的电机e35对滚轮36进行转动驱动,通过滚轮36对牵引绳37的收卷来利用其与挂钩40的连接带动着承载座39带动着设备一同进行移动,使得设备可以更加便利的运动到底座1上方并进行自动化的定位以及限位工作,进而达到更加方便于多种设备进行配合使用的目的。
43.使用时:首先,当需要对工业互联网技术进行实训作业时,可以将需要进行使用的实训模块安装到安装架10前端所开设的凹槽内部位置,并同步的在对实训模块进行安装时,需要预先根据实训模块的插孔位置不同来对磁盘16以及插柱17的位置进行调节,直至当实训模块可以插入到安装架10前端所开设的凹槽内部即可;
44.而当实训模块插入到凹槽内部时,则可以同步的启动安装在底板25前端的电动推杆b26将接线端27向前侧进行推动,直至当接线端27与设置在实训模块后侧的接口进行插接通电即可,此时操作者即可通过对实训模块的操控来实现进行工业互联网技术的实训作业;
45.并且,当底座1通过其底端所安装的万向轮2移动到合适位置时,若需要对安装在安装座5中的支架7的角度进行调整时,可以通过启动安装在安装座5外侧的电机a6对支架7进行翻折,而当支架7向后侧进行翻折时,则可以通过启动安装在底座1前端的风机a3来对设置在底座1中底端面后侧的风管4的内部进行供风,并通过风管4的出风来产生一个反推力,使得支架7在向后侧进行翻转时可以进行辅助支撑作业,进而达到防止装置出现倾倒的问题出现;
46.并且,当操作者处于站立状态并对设置在安装架10内部的实训模块进行操控时,若需要对安装架10中位于底端的实训模块进行操控时,可以通过启动安装在支架7外侧的电机b13对齿轮12进行转动驱动,并通过齿轮12与固定连接在滑块8前端的齿条9进行啮合,并同步的带动着滑块8以及安装架10沿着支架7中所开设的纵向槽向上移动,以实现自动化的带动着安装在安装架10中的实训模块进行自动化的升降,以供使用者进行快速操控,进而提高对实训设备的使用效率;
47.并且,当操作者对当前设置在安装架10中的实训模块操作完成需要进行验收时,则可以通过启动安装在安装架10中的电动推杆a18对移动块19的高度进行调整,而当移动块19进行移动时,可以同步的带动着承载架20及后侧所安装的监控器22进行移动,通过监控器22来对当前设置在安装架10中的各个实训模块的连线状态进行拍摄并与预先设定好的数据进行对比,然后再通过中控器14监控对比后自动化的对当前操作者的实训情况进行识别判断,进而达到更加实用的目的;
48.并且,当操作者对设置在安装架10中的实训模块进行操控时,设置在安装架10顶端的中控器14可以对接线以及操作的状态进行持续监测,若监测到使用者的操作存在着失误时,则可以同步的启动安装在中控器14前端的报警器15进行报警,并同步的对设置在相应误操作后侧的电动推杆b26进行启动,通过电动推杆b26将接线端27向后侧进行拉扯,使得接线端27与设置在安装架10中的实训模块进行主动化的脱离断电操作,使得其可以有效的避免因使用者的误操作对实训设备造成损坏的问题出现;
49.而当需要对外部的实训设备进行配合使用时,可以通过启动安装在底座1中的电机c28对台座29进行翻转驱动,并使得导轨31朝向需要安装的设备一侧进行放置即可,然后
再同步的将需要进行牵引的设备放置到承载座39之上并进行固定,然后再通过启动安装在安装板34外侧的电机e35对滚轮36进行转动驱动,通过滚轮36对牵引绳37的收卷来利用其与挂钩40的连接带动着承载座39带动着设备一同进行移动,使得设备可以更加便利的运动到底座1上方并进行自动化的定位以及限位工作,进而达到更加方便于多种设备进行配合使用的目的。
50.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。