技术特征:
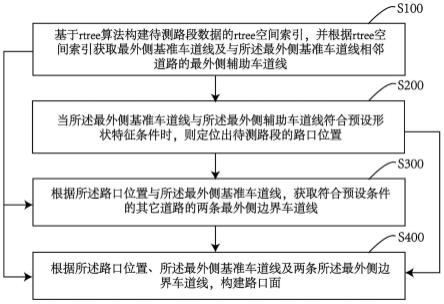
1.一种高精度地图路口面自动定位与绘制方法,其特征在于,包括以下步骤:基于rtree算法构建待测路段数据的rtree空间索引,并根据rtree空间索引获取最外侧基准车道线及与所述最外侧基准车道线相邻道路的最外侧辅助车道线;当所述最外侧基准车道线与所述最外侧辅助车道线符合预设形状特征条件时,则定位出待测路段的路口位置;根据所述路口位置与所述最外侧基准车道线,获取符合预设条件的其它道路的两条最外侧边界车道线;根据所述路口位置、所述最外侧基准车道线及两条所述最外侧边界车道线,构建路口面。2.如权利要求1所述的高精度地图路口面自动定位与绘制方法,其特征在于,所述最外侧基准车道线的端部与其它车道线无接续关系
,
所述端部为首端或尾端。3.如权利要求1所述的高精度地图路口面自动定位与绘制方法,其特征在于,所述“当所述最外侧基准车道线与所述最外侧辅助车道线符合预设形状特征条件时,则定位出待测路段的路口位置”步骤,具体包括以下步骤:当所述最外侧基准车道线的端部处与所述最外侧辅助车道线的端部处的矢量方向在预设角度范围内时;当所述最外侧基准车道线的端部处与所述最外侧辅助车道线的端部处的高程值相同时;当所述最外侧基准车道线的端部与所述最外侧辅助车道线的端部之间的距离在预设距离内时;以及,当所述最外侧基准车道线的端部处与所述最外侧辅助车道线的端部处的延长线相交时;则定位出所述最外侧基准车道线的端部与所述最外侧辅助车道线的端部在路口位置;其中,所述端部为首端或尾端,所述最外侧基准车道线的首端和尾端对应于所述最外侧辅助车道线的首端和尾端。4.如权利要求1所述的高精度地图路口面自动定位与绘制方法,其特征在于,所述“根据所述路口位置与所述最外侧基准车道线,获取符合预设条件的其它道路的两条最外侧边界车道线”步骤,具体包括以下步骤:基于所述路口位置处的最外侧基准车道线的端部作最外侧基准车道线的垂线,除开最外侧辅助车道线,获取分别与所述垂线的两端相交、并与最外侧基准车道线相邻两条道路上、且与最外侧基准车道线的端部距离最近的各一条最外侧边界车道线。5.如权利要求1所述的高精度地图路口面自动定位与绘制方法,其特征在于,所述“根据所述路口位置、所述最外侧基准车道线及两条所述最外侧边界车道线,构建路口面”步骤,具体包括以下步骤:基于所述路口位置处的最外侧基准车道线的端部分别作两条最外侧边界车道线的第一垂线段,两条所述第一垂线段作为路口面的两条起始边;以垂直相交的其中一条起始边与其中一条最外侧车道边界线的交点为起点,沿其中一条最外侧车道边界线间隔预设固定距离向另一条最外侧车道边界线作第二垂线段;当相邻的两条所述第二垂线段之间的长度差值除以预设固定距离得到的值小于预设
阈值,则最后的第二垂线段为路口面的结束边;构建两条所述起始边、两条所述最外侧边界车道线及所述结束边围成的面为路口面。6.一种高精度地图路口面自动定位与绘制系统,其特征在于,包括:基准辅助模块,用于基于rtree算法构建待测路段数据的rtree空间索引,并根据rtree空间索引获取最外侧基准车道线及与所述最外侧基准车道线相邻道路的最外侧辅助车道线;定位模块,与所述基准辅助模块通信连接,用于当所述最外侧基准车道线与所述最外侧辅助车道线符合预设形状特征条件时,则定位出待测路段的路口位置;边界模块,与所述基准辅助模块及所述定位模块通信连接,用于根据所述路口位置与所述最外侧基准车道线,获取符合预设条件的其它道路的两条最外侧边界车道线;以及,路口面构建模块,与所述基准辅助模块、所述定位模块及所述边界模块通信连接,用于根据所述路口位置、所述最外侧基准车道线及两条所述最外侧边界车道线,构建路口面。7.如权利要求6所述的高精度地图路口面自动定位与绘制系统,其特征在于,所述边界模块,用于基于所述路口位置处的最外侧基准车道线的端部作最外侧基准车道线的垂线,除开最外侧辅助车道线,获取分别与所述垂线的两端相交、并与最外侧基准车道线相邻两条道路上、且与最外侧基准车道线的端部距离最近的各一条最外侧边界车道线。8.如权利要求6所述的高精度地图路口面自动定位与绘制系统,其特征在于,所述路口面构建模块,用于基于所述路口位置处的最外侧基准车道线的端部分别作两条最外侧边界车道线的第一垂线段,两条所述第一垂线段作为路口面的两条起始边;以垂直相交的其中一条起始边与其中一条最外侧车道边界线的交点为起点,沿其中一条最外侧车道边界线间隔预设固定距离向另一条最外侧车道边界线作第二垂线段;当相邻的两条所述第二垂线段之间的长度差值除以预设固定距离得到的值小于预设阈值,则最后的第二垂线段为路口面的结束边;构建两条所述起始边、两条所述最外侧边界车道线及所述结束边围成的面为路口面。9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至5中任一项所述的高精度地图路口面自动定位与绘制方法。
技术总结
本发明公开了一种高精度地图路口面自动定位与绘制方法、系统及介质,其方法包括以下步骤:基于rtree算法构建待测路段数据的rtree空间索引,并根据rtree空间索引获取最外侧基准车道线及与所述最外侧基准车道线相邻道路的最外侧辅助车道线;当所述最外侧基准车道线与所述最外侧辅助车道线符合预设形状特征条件时,则定位出待测路段的路口位置;根据所述路口位置与所述最外侧基准车道线,获取符合预设条件的其它道路的两条最外侧边界车道线;根据所述路口位置、所述最外侧基准车道线及两条所述最外侧边界车道线,构建路口面;能自动化处理,无需人工干预,提高生产效率,同时路口面范围精度高,避免人工误差。避免人工误差。避免人工误差。
技术研发人员:周凯昇 陈高攀 郭杨斌 罗跃军
受保护的技术使用者:武汉中海庭数据技术有限公司
技术研发日:2022.11.16
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。