1.本实用新型涉及环境保护领域,具体而言,涉及一种水域清洁机器人。
背景技术:
2.当今水域垃圾污染日益恶化,严重的海上污染已经极大地影响到沿海居民的生活以及国家沿海经济发展。解决水域垃圾问题迫在眉睫。目前市面上成都某展览会上的“河宝”水上智能清洁机器人通过小型锂电池供电,能源不足且续航时间短;中科院“风光互补水面清洁机器人”虽然实现了能源利用,但是后续的垃圾处理仍消耗大量的财力和物力。
3.因此,需要一种或多种方法解决上述问题。
4.需要说明的是,在上述背景技术部分实用新型的信息仅用于加强对本实用新型的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
5.本实用新型的目的在于提供一种水域清洁机器人,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
6.根据本实用新型的一个方面,提供一种水域清洁机器人,包括驱动模块、平衡模块、抓取模块、储存模块:
7.所述驱动模块包括锥形线圈、前左螺旋桨、前右螺旋桨、后左螺旋桨、后右螺旋桨、左升螺旋桨、右升螺旋桨,所述驱动模块用于基于锥形线圈通过无线电磁耦合方式接收岸基供电,为所述前左螺旋桨、前右螺旋桨、后左螺旋桨、后右螺旋桨、左升螺旋桨、右升螺旋桨提供动力,以驱动机器人在水面完成前进、后退、旋转、横移动作;
8.所述平衡模块包括舵机、浮块、连杆,所述平衡模块用于基于舵机作用并通过连杆实现浮块的折叠,以使所述机器人的中心位置发生改变,完成对所述机器人平衡调节;
9.所述抓取模块包括摄像头、机械臂,所述抓取模块用于基于摄像头完成对水域垃圾的抓取,并将抓取的垃圾通过机械臂放置在所述储存模块储存;
10.所述储存模块包括降解储存箱、垃圾箱,所述垃圾箱固定安装在所述机器人顶板后部,所述储存模块用于储存所述抓取模块通过机械臂抓取的垃圾。
11.在本实用新型的一种示例性实施例中,所述机器人的驱动模块中:
12.所述锥形线圈为双线圈对称结构,固定安装在所述机器人顶板前部两侧;
13.所述前左螺旋桨、前右螺旋桨分别固定安装在所述机器人地板前左侧、前右侧;
14.所述后左螺旋桨、后右螺旋桨分别固定安装在所述机器人地板后左侧、后右侧;
15.所述左升螺旋桨、右升螺旋桨分别固定安装在所述机器人地板中部坐开孔侧、右开孔侧。
16.在本实用新型的一种示例性实施例中,所述机器人的平衡模块中:
17.所述浮块贯通安装在所述机器人中腔内部,通过连杆与所述舵机连接;
18.所述舵机固定安装在所述机器人中腔边框,并通过所述驱动模块的锥形线圈供
电。
19.在本实用新型的一种示例性实施例中,所述机器人的抓取模块中:
20.所述摄像头固定安装在所述机械人顶板前部中央位置,用于采集机器人预设范围内水域图像并发送至远程控制端;
21.所述机械臂固定安装在所述机械人顶板中部中央位置摄像头上方,用于接收远程控制端的控制信号,并基于所述控制信号完成水域垃圾的抓取。
22.在本实用新型的一种示例性实施例中,所述机器人的抓取模块还包括:
23.摄像头外壳,所述摄像头外壳安装在所述摄像头周围,用于保护所述摄像头。
24.在本实用新型的一种示例性实施例中,所述机器人的储存模块还包括:
25.斜管,所述斜管按照预设倾斜角度固定安装在所述降解储存箱内部,用于储存降解酶,并通过所述机械人的预设倾斜姿态使所述降解酶流入所述垃圾箱中,以催化加速所述垃圾分解。
26.本实用新型的示例性实施例中的水域清洁机器人,包括驱动模块、平衡模块、抓取模块、储存模块:所述驱动模块用于基于锥形线圈通过无线电磁耦合方式接收岸基供电,以驱动机器人在水面完成前进、后退、旋转、横移动作;所述平衡模块用于基于舵机作用并通过连杆实现浮块的折叠,完成对所述机器人平衡调节;所述抓取模块用于基于摄像头完成对水域垃圾的抓取,并将抓取的垃圾通过机械臂放置在所述储存模块储存。本实用新型实现了基于无线供电的水域清洁机器人对水域垃圾的精准清洁和催化降解功能。
27.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本实用新型。
附图说明
28.通过参照附图来详细描述其示例实施例,本实用新型的上述和其它特征及优点将变得更加明显。
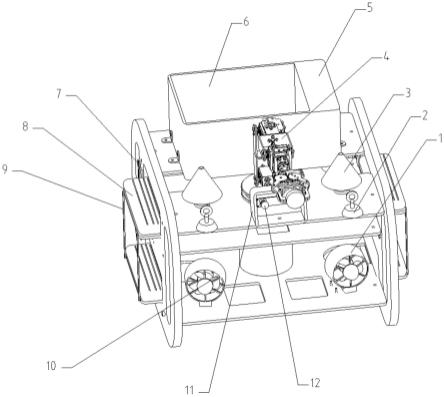
29.图1示出了根据本实用新型一示例性实施例的水域清洁机器人的示意图;
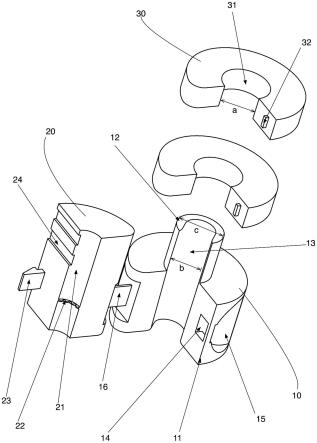
30.图2示出了根据本实用新型一示例性实施例的水域清洁机器人的机械臂示意图;
31.图3示出了根据本实用新型一示例性实施例的水域清洁机器人的俯视图;
32.图4示出了根据本实用新型一示例性实施例的水域清洁机器人的机械臂俯视图;
33.图5示出了根据本实用新型一示例性实施例的水域清洁机器人的后视图。
具体实施方式
34.现在将参考附图更全面地描述示例实施例。然而,示例实施例能够以多种形式实施,且不应被理解为限于在此阐述的实施例;相反,提供这些实施例使得本实用新型将全面和完整,并将示例实施例的构思全面地传达给本领域的技术人员。在图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。
35.此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本实用新型的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本实用新型的技术方案而没有所述特定细节中的一个或更多,或者可以采用其它的方法、组元、材料、装置、步骤等。在其它情况下,不详细示
出或描述公知结构、方法、装置、实现、材料或者操作以避免模糊本实用新型的各方面。
36.附图中所示的方框图仅仅是功能实体,不一定必须与物理上独立的实体相对应。即,可以采用软件形式来实现这些功能实体,或在一个或多个软件硬化的模块中实现这些功能实体或功能实体的一部分,或在不同网络和/或处理器装置和/或微控制器装置中实现这些功能实体。
37.在本示例实施例中,首先提供了一种水域清洁机器人;参考图1中所示,该水域清洁机器人包括驱动模块、平衡模块、抓取模块、储存模块:
38.所述驱动模块包括锥形线圈3、前左螺旋桨1、前右螺旋桨10、后左螺旋桨13、后右螺旋桨15、左升螺旋桨17、右升螺旋桨18,所述驱动模块用于基于锥形线圈3通过无线电磁耦合方式接收岸基供电,为所述前左螺旋桨1、前右螺旋桨10、后左螺旋桨13、后右螺旋桨15、左升螺旋桨17、右升螺旋桨18提供动力,以驱动机器人在水面完成前进、后退、旋转、横移动作;
39.所述平衡模块包括舵机7、浮块8、连杆9,所述平衡模块用于基于舵机7作用并通过连杆9实现浮块8的折叠,以使所述机器人的中心位置发生改变,完成对所述机器人平衡调节;
40.所述抓取模块包括摄像头12、机械臂4,所述抓取模块用于基于摄像头12完成对水域垃圾的抓取,并将抓取的垃圾通过机械臂4放置在所述储存模块储存;
41.所述储存模块包括垃圾箱6,所述垃圾箱6固定安装在所述机器人顶板后部,所述储存模块用于储存所述抓取模块通过机械臂4抓取的垃圾。
42.本实用新型的示例性实施例中的水域清洁机器人,包括驱动模块、平衡模块、抓取模块、储存模块:所述驱动模块用于基于锥形线圈通过无线电磁耦合方式接收岸基供电,以驱动机器人在水面完成前进、后退、旋转、横移动作;所述平衡模块用于基于舵机作用并通过连杆实现浮块的折叠,完成对所述机器人平衡调节;所述抓取模块用于基于摄像头完成对水域垃圾的抓取,并将抓取的垃圾通过机械臂放置在所述储存模块储存。本实用新型实现了基于无线供电的水域清洁机器人对水域垃圾的精准清洁和催化降解功能。
43.下面,将对本示例实施例中的水域清洁机器人进行进一步的说明。
44.所述水域清洁机器人包括驱动模块、平衡模块、抓取模块、储存模块。
45.所述驱动模块包括锥形线圈3、前左螺旋桨1、前右螺旋桨10、后左螺旋桨13、后右螺旋桨15、左升螺旋桨17、右升螺旋桨18,所述驱动模块用于基于锥形线圈3通过无线电磁耦合方式接收岸基供电,为所述前左螺旋桨1、前右螺旋桨10、后左螺旋桨13、后右螺旋桨15、左升螺旋桨17、右升螺旋桨18提供动力,以驱动机器人在水面完成前进、后退、旋转、横移动作。
46.在本示例的实施例中,如图1、5所示,所述机器人的驱动模块中:
47.所述锥形线圈3为双线圈对称结构,固定安装在所述机器人顶板前部两侧;
48.所述前左螺旋桨1、前右螺旋桨10分别固定安装在所述机器人地板前左侧、前右侧;
49.所述后左螺旋桨13、后右螺旋桨15分别固定安装在所述机器人地板后左侧、后右侧;
50.所述左升螺旋桨17、右升螺旋桨18分别固定安装在所述机器人地板中部坐开孔
侧、右开孔侧。
51.所述平衡模块包括舵机7、浮块8、连杆9,所述平衡模块用于基于舵机7作用并通过连杆9实现浮块8的折叠,以使所述机器人的中心位置发生改变,完成对所述机器人平衡调节。
52.在本示例的实施例中,所述机器人的平衡模块中:
53.所述浮块8贯通安装在所述机器人中腔内部,通过连杆9与所述舵机7连接;
54.所述舵机7固定安装在所述机器人中腔边框,并通过所述驱动模块的锥形线圈3供电。
55.所述抓取模块包括摄像头12、机械臂4,所述抓取模块用于基于摄像头12完成对水域垃圾的抓取,并将抓取的垃圾通过机械臂4放置在所述储存模块储存。
56.在本示例的实施例中,如图2、4所示,所述机器人的抓取模块中:
57.所述摄像头12固定安装在所述机械人顶板前部中央位置,用于采集机器人预设范围内水域图像并发送至远程控制端;
58.所述机械臂4固定安装在所述机械人顶板中部中央位置摄像头12上方,用于接收远程控制端的控制信号,并基于所述控制信号完成水域垃圾的抓取。
59.在本示例的实施例中,所述机器人的抓取模块还包括:
60.摄像头外壳11,所述摄像头外壳11安装在所述摄像头12周围,用于保护所述摄像头12。
61.所述储存模块包括降解储存箱5、垃圾箱6,所述垃圾箱6固定安装在所述机器人顶板后部,所述储存模块用于储存所述抓取模块通过机械臂4抓取的垃圾。
62.在本示例的实施例中,所述机器人的储存模块还包括:
63.斜管17,如图3所示,所述斜管17按照预设倾斜角度固定安装在所述降解储存箱5内部,用于储存降解酶,并通过所述机械人的预设倾斜姿态使所述降解酶流入所述垃圾箱6中,以催化加速所述垃圾分解。
64.应当注意,尽管在上文详细描述中提及了水域清洁机器人装置的若干模块或者单元,但是这种划分并非强制性的。实际上,根据本实用新型的实施方式,上文描述的两个或更多模块或者单元的特征和功能可以在一个模块或者单元中具体化。反之,上文描述的一个模块或者单元的特征和功能可以进一步划分为由多个模块或者单元来具体化。
65.此外,上述附图仅是根据本实用新型示例性实施例的方法所包括的处理的示意性说明,而不是限制目的。易于理解,上述附图所示的处理并不表明或限制这些处理的时间顺序。另外,也易于理解,这些处理可以是例如在多个模块中同步或异步执行的。
66.本领域技术人员在考虑说明书及实践这里实用新型的方案后,将容易想到本实用新型的其他实施例。本技术旨在涵盖本实用新型的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本实用新型的一般性原理并包括本实用新型未实用新型的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本实用新型的真正范围和精神由权利要求指出。
67.应当理解的是,本实用新型并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本实用新型的范围仅由所附的权利要求来限。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。