技术特征:
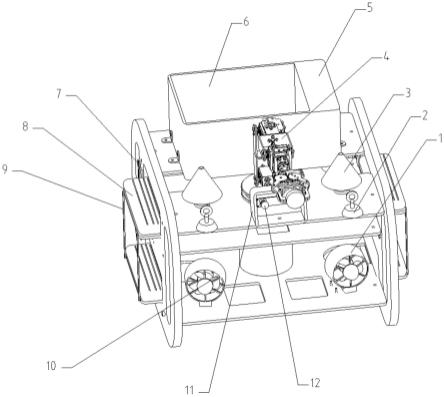
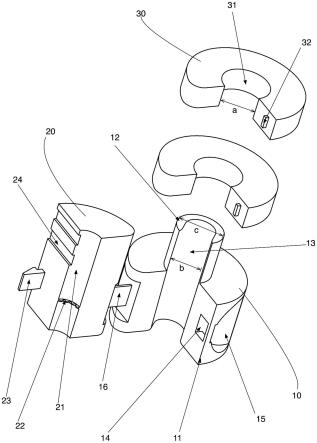
1.一种水域清洁机器人,其特征在于,所述机器人包括驱动模块、平衡模块、抓取模块、储存模块:所述驱动模块包括锥形线圈、前左螺旋桨、前右螺旋桨、后左螺旋桨、后右螺旋桨、左升螺旋桨、右升螺旋桨,所述驱动模块用于基于锥形线圈通过无线电磁耦合方式接收岸基供电,为所述前左螺旋桨、前右螺旋桨、后左螺旋桨、后右螺旋桨、左升螺旋桨、右升螺旋桨提供动力,以驱动机器人在水面完成前进、后退、旋转、横移动作;所述平衡模块包括舵机、浮块、连杆,所述平衡模块用于基于舵机作用并通过连杆实现浮块的折叠,以使所述机器人的中心位置发生改变,完成对所述机器人平衡调节;所述抓取模块包括摄像头、机械臂,所述抓取模块用于基于摄像头完成对水域垃圾的抓取,并将抓取的垃圾通过机械臂放置在所述储存模块储存;所述储存模块包括降解储存箱、垃圾箱,所述垃圾箱固定安装在所述机器人顶板后部,所述储存模块用于储存所述抓取模块通过机械臂抓取的垃圾。2.如权利要求1所述的机器人,其特征在于,所述机器人的驱动模块中:所述锥形线圈为双线圈对称结构,固定安装在所述机器人顶板前部两侧;所述前左螺旋桨、前右螺旋桨分别固定安装在所述机器人地板前左侧、前右侧;所述后左螺旋桨、后右螺旋桨分别固定安装在所述机器人地板后左侧、后右侧;所述左升螺旋桨、右升螺旋桨分别固定安装在所述机器人地板中部坐开孔侧、右开孔侧。3.如权利要求1所述的机器人,其特征在于,所述机器人的平衡模块中:所述浮块贯通安装在所述机器人中腔内部,通过连杆与所述舵机连接;所述舵机固定安装在所述机器人中腔边框,并通过所述驱动模块的锥形线圈供电。4.如权利要求1所述的机器人,其特征在于,所述机器人的抓取模块中:所述摄像头固定安装在所述机器人顶板前部中央位置,用于采集机器人预设范围内水域图像并发送至远程控制端;所述机械臂固定安装在所述机器人顶板中部中央位置摄像头上方,用于接收远程控制端的控制信号,并基于所述控制信号完成水域垃圾的抓取。5.如权利要求4所述的机器人,其特征在于,所述机器人的抓取模块还包括:摄像头外壳,所述摄像头外壳安装在所述摄像头周围,用于保护所述摄像头。6.如权利要求1所述的机器人,其特征在于,所述机器人的储存模块还包括:斜管,所述斜管按照预设倾斜角度固定安装在所述降解储存箱内部,用于储存降解酶,并通过所述机器人的预设倾斜姿态使所述降解酶流入所述垃圾箱中,以催化加速所述垃圾分解。
技术总结
本实用新型是关于一种水域清洁机器人,包括驱动模块、平衡模块、抓取模块、储存模块:所述驱动模块用于基于锥形线圈通过无线电磁耦合方式接收岸基供电,以驱动机器人在水面完成前进、后退、旋转、横移动作;所述平衡模块用于基于舵机作用并通过连杆实现浮块的折叠,完成对所述机器人平衡调节;所述抓取模块用于基于摄像头完成对水域垃圾的抓取,并将抓取的垃圾通过机械臂放置在所述储存模块储存。本实用新型实现了基于无线供电的水域清洁机器人对水域垃圾的精准清洁和催化降解功能。域垃圾的精准清洁和催化降解功能。域垃圾的精准清洁和催化降解功能。
技术研发人员:郑佳佳 程宇翔 张熙元 杨志超 李治萱 傅与涵 王鹏 周京华 张贵辰
受保护的技术使用者:北方工业大学
技术研发日:2022.08.26
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。