技术特征:
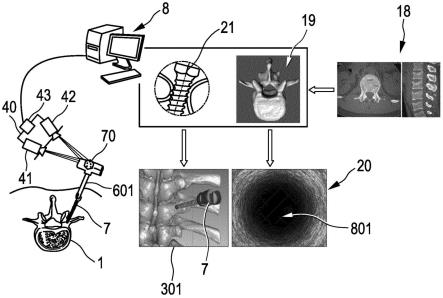
1.一种用于辅助用户将穿透设备(7)放置在对象的骨骼组织中的系统,所述系统(8)包括:-第一输入端,其用于接收指示所述穿透设备(7)的三维姿态的跟踪信息,-第二输入端,其用于接收所述组织的三维模型(19),-第三输入端,其用于接收通过所述模型(19)的路径(21),-处理器(14),其被配置为基于接收到的跟踪信息、接收到的模型(19)和接收到的路径(21)来生成虚拟视图(20),所述虚拟视图包括来自所述穿透设备(7)的尖端的透视的对所提供的路径(21)的表示,其中,所述虚拟视图被配置为使得所述虚拟视图指示在将所述穿透设备放置在所述组织中时所述用户应当将所述穿透设备进行移动的方向,以及-用户接口,其用于向用户或对象提供所述虚拟视图,所述用户例如为医学从业者,其中,所述处理器(14)被配置为生成所述虚拟视图(20),使得所述虚拟视图示出所述组织内的虚拟通道(801),其中,所述虚拟通道表示由所述模型提供的不同骨骼组织类型。2.根据权利要求1所述的系统,其中,所述虚拟通道(801)沿着所述接收到的路径(21)被布置,使得所述虚拟视图(20)是在所述接收到的路径(21)的方向上的所述虚拟通道(801)中的视图,以便指示所述用户在将所述穿透设备放置在所述组织中时应当将所述穿透设备进行移动的方向。3.根据权利要求2所述的系统,其中,所述模型(19)被配置为使得其区分具有第一密度的第一骨骼组织类型与具有第二密度的第二骨骼组织类型,其中,所述第二骨骼组织类型至少部分地包围所述第一骨骼组织类型,其中,处理器(14)被配置为生成所述虚拟通道(801),使得所述通道(801)的内部中空部分表示所述第一骨骼组织类型,并且所述通道(801)的外壁表示所述第二骨骼组织类型。4.根据前述权利要求中的任一项所述的系统,其中,所述组织是包括椎弓根的椎骨的骨骼,其中,所述模型被配置为提供包括所述椎弓根的所述椎骨(1)的所述骨骼的三维模型(19),其中,所述系统还包括路径提供单元(11),所述路径提供单元被配置为基于由所述模型(19)提供的所述椎弓根的形状和尺寸来计算所述路径(21)。5.根据权利要求4所述的系统,其中,所述路径提供单元(11)被配置为:将沙漏形模型(22)映射到由所述模型提供的所述椎弓根,并且基于所映射的沙漏形模型(22)来计算所述路径(21)。6.根据权利要求4和5中的任一项所述的系统,其中,所述路径提供单元(11)被配置为还基于由所述模型(19)提供的所述椎骨的所述骨骼的主体的端板的取向来计算所述路径(21),其中,当人站立时,所述端板在所述椎骨的顶部和在所述椎骨之下。7.根据前述权利要求中的任一项所述的系统,其中,所述处理器(14)被配置为:基于所提供的模型(19)和所提供的跟踪信息来确定所提供的路径与由所述跟踪信息指示的所述穿透设备(7)的位置之间的距离,并且基于所确定的距离来生成信号。8.根据前述权利要求中的任一项所述的系统,其中,所述处理器(14)被配置为:基于所提供的路径(21)和所提供的模型(19)来确定所述穿透设备(7)进入所述组织的期望进入角度,基于所提供的跟踪信息和所提供的模型(19)来确定所述穿透设备(7)进入所述组织的当前进入角度,确定所述期望进入角度与当前进入角度之间的偏差,并且根据所确定的偏差来生成信号。
9.根据前述权利要求中的任一项所述的系统,其中,所述系统(8)还包括接近度信息提供单元(12),所述接近度信息提供单元被配置为提供指示所述穿透设备(7)与所述骨骼(1)的皮质壁之间的距离的接近度信息,其中,所述接近度信息已经基于在所述穿透设备(7)的尖端处执行的测量被确定,其中,所述模型被配置为使得所述模型示出所述骨骼(1)的所述皮质壁,其中,所述处理器(14)被配置为:基于所提供的模型(19)和由所述跟踪信息指示的所述穿透设备(7)的位置来确定所述穿透设备(7)与所述皮质壁之间的距离,确定由所提供的接近度信息指示的所述距离与所确定的距离之间的偏差,并且基于所确定的偏差来确定指示所生成的虚拟视图(20)的准确度的准确度指示符。10.根据权利要求9所述的系统,其中,所述处理器(14)被配置为通过调整由所提供的跟踪信息指示的所述穿透设备(7)的所述姿态来调整所述虚拟视图(20),使得所述准确度指示符指示增加的准确度。11.根据前述权利要求中的任一项所述的系统,其中,所述系统(8)还包括组织信息提供单元(13),所述组织信息提供单元被配置为提供关于通过使用所述穿透设备(7)感测到的组织类型的组织类型信息。12.根据权利要求11所述的系统,其中:所提供的模型(19)示出不同的组织类型,其中,所述处理器(14)被配置为:基于所提供的模型(19)和所提供的跟踪信息来确定预期组织类型,确定所述预期组织类型与由所提供的组织类型信息定义的组织类型是否彼此匹配,并且在所述组织类型不匹配的情况下生成指示所述不匹配的信号;和/或所述处理器(14)被配置为生成所述虚拟视图(20),使得所述虚拟视图还指示感测到的组织类型。13.根据前述权利要求中的任一项所述的系统,其中,所述模型被配置为使得所述模型还示出风险结构,其中,所述处理器(14)被配置为:针对所述模型的多个区域根据相应区域到所述风险结构的距离来确定风险值,并且在所述虚拟视图中的所述多个区域中指示所确定的风险值。14.一种计算机程序,所述计算机程序包括程序代码模块,当所述计算机程序在控制根据权利要求1至13中的任一项所述的系统的计算机上运行时,所述程序代码模块用于使所述系统执行用于辅助用户将穿透设备(7)放置在骨骼组织中的方法,所述方法包括:-接收或提供指示所述穿透设备(7)的三维姿态的跟踪信息;-接收或提供所述组织的三维模型(19);-接收或提供通过所述模型(19)的路径(21);并且-基于接收到的或所提供的跟踪信息、接收到的或所提供的模型(19)和接收到的或所提供的路径(21)来生成在接收到的或所提供的路径(21)的方向上的来自所述组织内的所述穿透设备(7)的尖端的透视的虚拟视图(20),其中,所述虚拟视图被生成为使得所述虚拟视图指示在将所述穿透设备放置在所述组织中时所述用户应当将所述穿透设备进行移动的方向,其中,所述虚拟视图(20)示出所述组织内的虚拟通道(801),其中,所述虚拟通道表示由所述模型提供的不同骨骼组织类型。15.根据权利要求14所述的计算机程序,其被存储在计算机可读介质上。
技术总结
本发明涉及一种用于辅助用户将穿透设备放置在组织中(如将椎弓根螺钉(7)放置在椎骨椎弓根中)的系统(8)。该系统生成在通过组织的模型的路径(21)的方向上的来自组织内的穿透设备尖端透视的虚拟视图(20)。该虚拟视图是基于指示穿透设备的姿态的跟踪信息、模型和路径生成的,其中,该虚拟视图被配置为使得其指示用户在将穿透设备放置在组织中时应当移动穿透设备的方向。例如,其可以示出沿着路径布置的虚拟通道(801)。如果为用户(如外科医生)提供这样的虚拟视图,则用户可以以显著增加的准确度沿着路径定位穿透设备。确度沿着路径定位穿透设备。确度沿着路径定位穿透设备。
技术研发人员:J
受保护的技术使用者:皇家飞利浦有限公司
技术研发日:2021.06.29
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。