1.本发明涉及位置检测装置。
背景技术:
2.作为公开了位置检测装置的构成的现有文献,存在美国专利申请公开第2018/0188476号说明书(专利文献1)。专利文献1所记载的位置检测装置具备:固定部、可动部、光学元件、位置检测用磁体、以及磁传感器。可动部可移动地与固定部连接。光学元件配置于可动部上。位置检测用磁体与光学元件对应,具有磁化方向。磁传感器与位置检测用磁体对应,检测位置检测用磁体绕与固定部相关的轴的旋转。上述轴与位置检测用磁体的磁化方向正交。
3.专利文献1:美国专利申请公开第2018/0188476号说明书
技术实现要素:
发明所要解决的课题
4.在专利文献1所记载的位置检测装置中,存在能够以简单的构成优化位置检测范围及位置检测精度的余地。
5.本发明就是鉴于上述问题点而提出的,其目的在于提供一种能够以简单的构成优化位置检测范围及位置检测精度的位置检测装置。解决课题的技术手段
6.基于本发明的位置检测装置具备光学反射元件、位置检测用磁体和磁传感器。光学反射元件设置为能够以旋转轴为中心旋转。位置检测用磁体设置在光学反射元件上。位置检测用磁体的磁化方向与上述旋转轴的轴向平行。磁传感器被固定配置。磁传感器能够对在光学反射元件旋转时进行相对移动的位置检测用磁体所施加的磁场进行检测。位置检测用磁体能够由于光学反射元件的旋转而通过基准位置,该基准位置为从上述轴向观察下上述旋转轴、磁传感器的中心、位置检测用磁体的中心排列于一直线上时的位置。磁传感器配置于包含穿过位于上述基准位置的位置检测用磁体的中心的上述磁化方向、以及上述轴向的平面内。发明的效果
7.根据本发明,能够以简单的构成优化位置检测范围及位置检测精度。
附图说明
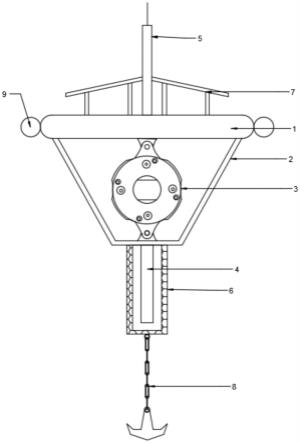
8.图1是表示包含本发明的一个实施方式所涉及的位置检测装置的紧凑型相机模块的构成的侧视图。图2是表示图1的紧凑型相机模块中光学反射元件以旋转轴为中心向一个方向旋转后的状态的图。图3是表示图1的紧凑型相机模块中光学反射元件以旋转轴为中心向另一方向旋
转后的状态的图。图4是将图1的紧凑型相机模块中的位置检测装置的构成放大表示的侧视图。图5是从旋转轴的轴向观察本发明的一个实施方式所涉及的位置检测装置中的、位置检测用磁体与磁传感器之间的位置关系而示出的图。图6是表示本发明的一个实施方式所涉及的位置检测装置具备的磁传感器的构成的图。图7是表示本发明的一个实施方式所涉及的位置检测装置具备的磁传感器的电路结构的图。图8是放大表示图6的viii部的立体图。图9是从图8的ix-ix线箭头方向观察的截面图。图10是表示实验例的结果的曲线图。图11是用于说明磁传感器的输出的误差率的曲线图。图12是表示在实验例所涉及的磁传感器的检测角的测量预定范围内、与磁传感器的输出的所需的线性误差率对应而旋转角和l1/l2可取的范围的曲线图。
具体实施方式
9.以下,参照附图说明本发明的一个实施方式所涉及的位置检测装置。在以下的实施方式的说明中,对图中相同或相当的部分标注相同标号,相关说明不再重复。
10.图1是表示包含本发明的一个实施方式所涉及的位置检测装置的紧凑型相机模块的构成的侧视图。在图1中,未图示位置检测装置具备的位置检测用磁体及磁传感器。
11.如图1所示,包含本发明的一个实施方式所涉及的位置检测装置的紧凑型相机模块1具备光学反射元件2、包含透镜组的致动器部3、图像传感器4和固定部5。光学反射元件2、包含透镜组的致动器部3及图像传感器4分别沿固定部5的主面配置。紧凑型相机模块1为潜望式相机模块。如后述所示,紧凑型相机模块1通过使光学反射元件2旋转,从而实现所谓的手抖动补偿功能。
12.光学反射元件2设置为能够以旋转轴c为中心旋转。具体而言,光学反射元件2为棱镜反射镜。光学反射元件2通过被未图示的驱动机构驱动而以旋转轴c为中心旋转。旋转轴c与固定部5的主面正交。由此,光学反射元件2沿固定部5的主面旋转。
13.从紧凑型相机模块1的外部进入的光la向光学反射元件2入射。光la经由光学反射元件2反射而产生的光lb射向包含透镜组的致动器部3,穿过透镜组。穿过透镜组后的光lc向图像传感器4入射。
14.图2是表示图1的紧凑型相机模块中光学反射元件以旋转轴为中心向一个方向旋转后的状态的图。图3是表示图1的紧凑型相机模块中光学反射元件以旋转轴为中心向另一方向旋转后的状态的图。
15.如图2所示,在光学反射元件2以旋转轴c为中心向一个方向x旋转后的状态下,射向包含透镜组的致动器部3的光lb的入射角与光学反射元件2的旋转角对应地发生变化。其结果,光lc向图像传感器4入射的位置沿箭头d所示的方向位移。
16.如图3所示,在光学反射元件2以旋转轴c为中心向另一方向y旋转后的状态下,射向包含透镜组的致动器部3的光lb的入射角与光学反射元件2的旋转角对应地发生变化。其
结果,光lc向图像传感器4入射的位置沿箭头u所示的方向位移。
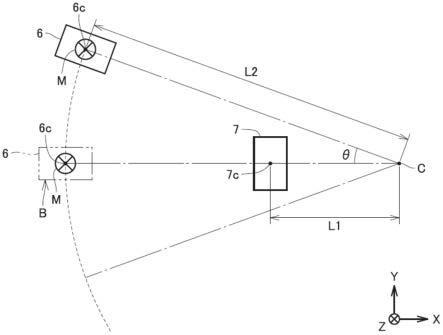
17.图4是将图1的紧凑型相机模块中的位置检测装置的构成放大表示的侧视图。图5是从旋转轴的轴向观察本发明的一个实施方式所涉及的位置检测装置中的、位置检测用磁体与磁传感器之间的位置关系而示出的图。在图5中,将与旋转轴c的轴向平行的方向记载为z轴方向,将位置检测用磁体6位于后述的基准位置b时的旋转轴c与位置检测用磁体6的中心6c连结的方向记载为x轴方向,并且将与x轴方向及z轴方向均正交的方向记载为y轴方向。
18.如图4及图5所示,本发明的一个实施方式所涉及的位置检测装置具备光学反射元件2、位置检测用磁体6和磁传感器7。位置检测用磁体6设置于光学反射元件2上。位置检测用磁体6固定于光学反射元件2的z轴方向的一个侧面上。磁传感器7被固定配置。磁传感器7固定于与光学反射元件2的z轴方向的另一侧面相对的、固定部5的主面上。
19.具体而言,如图5所示,从旋转轴c的轴向观察下,磁传感器7的中心7c与旋转轴c之间的最短距离为l1。从旋转轴c的轴向观察下,位置检测用磁体6的中心6c与旋转轴c之间的最短距离为l2。在本实施方式中,满足l1≦l2的关系。此外,z轴方向中的磁传感器7与位置检测用磁体6之间的位置关系并不特别限定。
20.位置检测用磁体6与光学反射元件2一起以旋转轴c为中心旋转。如图5所示,从旋转轴c的轴向观察下,位置检测用磁体6的中心6c在虚线所示的旋转轨迹上移动。位置检测用磁体6能够因光学反射元件2的旋转而通过基准位置b,该基准位置b为从旋转轴c的轴向观察下旋转轴c、磁传感器7的中心7c、位置检测用磁体6的中心6c排列于一直线上时的位置。位置检测用磁体6处的从基准位置b起绕旋转轴c的旋转角为θ。即,在θ=0时,位置检测用磁体6位于基准位置b。
21.位置检测用磁体6的磁化方向m与旋转轴c的轴向平行。具体而言,位置检测用磁体6的磁化方向m朝向旋转轴c的轴向另一侧。位置检测用磁体6的旋转轴c的轴向一侧为s极,位置检测用磁体6的旋转轴c的轴向另一侧为n极。
22.磁传感器7配置于包含穿过位于基准位置b的位置检测用磁体6的中心6c的磁化方向m、以及旋转轴c的轴向的平面内。即,磁传感器7配置于图5所示的xz平面内。磁传感器7能够检测出在光学反射元件2旋转时由相对移动的位置检测用磁体6施加的磁场。具体而言,磁传感器7与作为由位置检测用磁体6施加的磁场的朝向的检测角对应地进行输出。
23.图6是表示本发明的一个实施方式所涉及的位置检测装置具备的磁传感器的构成的图。图7是表示本发明的一个实施方式所涉及的位置检测装置具备的磁传感器的电路结构的图。在图6中,图示了从与图5相同的方向观察的磁传感器。
24.如图6及图7所示,磁传感器7具有构成电桥电路的多个磁阻效应元件。在本发明的一个实施方式中,磁传感器7具有第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻效应元件mr4。
25.具体而言,如图6所示,在磁传感器7中,第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻效应元件mr4分别设置于传感器基板7s的上表面。传感器基板7s上设置有电源端子vcc、接地端子gnd、第一输出端子v 及第二输出端子v-。位置检测用磁体6的检测对象磁场在沿着传感器基板7s的上表面的方向上对磁传感器7施加。
26.第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻
效应元件mr4彼此电连接而构成惠斯通电桥型的电桥电路。此外,磁传感器7也可以具有由第一磁阻效应元件mr1及第二磁阻效应元件mr2构成的半桥电路。
27.第一磁阻效应元件mr1及第二磁阻效应元件mr2的串联连接体、与第三磁阻效应元件mr3及第四磁阻效应元件mr4的串联连接体,在电源端子vcc与接地端子gnd之间并联连接。第一磁阻效应元件mr1与第二磁阻效应元件mr2的连接点处连接有第一输出端子v 。第三磁阻效应元件mr3与第四磁阻效应元件mr4的连接点处连接有第二输出端子v-。
28.第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻效应元件mr4分别为tmr(tunnel magneto resistance:隧道磁阻)元件。
29.第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻效应元件mr4各自的外形为大致矩形。第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻效应元件mr4整体为大致正方形。磁传感器7的中心7c位于该正方形的中心。
30.图8是放大表示图6的viii部的立体图。图9是从图8的ix-ix线箭头方向观察的截面图。如图8所示,第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻效应元件mr4分别由多个tmr元件10串联连接而构成。多个tmr元件10以矩阵状设置。
31.具体而言,由层叠且彼此串联连接的多个tmr元件10构成多层元件10b。由彼此串联连接的多个多层元件10b构成元件列10c。多个元件列10c在一端与另一端处交替地通过导线20连接。由此,在第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻效应元件mr4各自之中,多个tmr元件10电气串联连接。
32.如图8所示,在多层元件10b中位于下侧的tmr元件10的上部电极层18和位于上侧的tmr元件10的下部电极层11作为中间电极层19而一体地构成。即,在多层元件10b内彼此相邻的tmr元件10中的上部电极层18和下部电极层11作为中间电极层19而一体地构成。
33.如图9所示,第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻效应元件mr4各自的tmr元件10具有由下部电极层11、反铁磁层12、第一参考层13、非磁性中间层14、第二参考层15、隧道阻挡层16、自由层17和上部电极层18构成的层叠构造。
34.下部电极层11包括例如含有ta和cu的金属层或金属化合物层。反铁磁层12设置于下部电极层11之上,包括例如irmn、ptmn、femn、nimn、rurhmn或crptmn等的金属化合物层。第一参考层13设置于反铁磁层12之上,包括例如cofe等铁磁层。
35.非磁性中间层14设置于第一参考层13之上,包括例如由从ru、cr、rh、ir及re中选择的至少其中一种、或者这些金属中的两种以上的合金构成的层。第二参考层15设置于非磁性中间层14之上,包括例如cofe或cofeb等铁磁层。
36.隧道阻挡层16设置于第二参考层15之上,包括由氧化镁等含有mg、al、ti、zn、hf、ge及si的至少其中一种或两种以上的氧化物构成的层。自由层17设置于隧道阻挡层16之上,包括例如cofeb、或者由co、fe及ni等的至少其中一种或两种以上的合金构成的层。上部电极层18设置于自由层17之上,包括例如ta、ru或cu等的金属层。
37.第一磁阻效应元件mr1及第四磁阻效应元件mr4各自的钉扎层的磁化方向与第二磁阻效应元件mr2及第三磁阻效应元件mr3各自的钉扎层的磁化方向彼此以180
°
相反。
38.此外,第一磁阻效应元件mr1、第二磁阻效应元件mr2、第三磁阻效应元件mr3及第四磁阻效应元件mr4分别也可以具有以gmr(giant magneto resistance:巨磁阻)元件或amr(anisotropic magneto resistance:各向异性磁阻)元件等替代tmr元件的磁阻效应元件。
39.在这里,对实验例进行说明,该实验例验证了在本发明的一个实施方式所涉及的位置检测装置中,磁传感器7的中心7c与旋转轴c之间的最短距离l1和位置检测用磁体6的中心6c与旋转轴c之间的最短距离l2之比发生变化时的、旋转角θ(deg)与磁传感器7的检测角(deg)之间的关系的推移。
40.在实验例中,针对l1/l2=0、0.08、0.16、0.24、0.32、0.4、0.48、0.56、0.64、0.72、0.8的11个模式,验证了旋转角θ与磁传感器7的检测角之间的关系的推移。此外,对于磁传感器7的磁阻效应元件,设为在任一种位置关系下都处于从位置检测用磁体6施加了磁阻效应元件的饱和磁场的、例如10mt以上的检测对象磁场的状态。
41.图10是表示实验例的结果的曲线图。在图10中,纵轴表示磁传感器的检测角(deg),横轴表示旋转角θ(deg)。另外,分别以双点划线示出磁传感器的检测角为
±
20
°
的直线lx、磁传感器的检测角为
±
30
°
的直线ly、以及磁传感器的检测角为
±
50
°
的直线lz。
42.如图10所示,随着l1/l2越大,与旋转角θ相对的磁传感器7的检测角就越大,同时磁传感器7的输出具有线性的范围也变窄。
43.在这里,对磁传感器的输出的线性误差率进行定义。图11是用于说明磁传感器的输出的误差率的曲线图。在图11中,纵轴表示磁传感器7的检测角(deg),横轴表示旋转角θ(deg)。在图11中,以实线表示实际测量输出,以双点划线示出假想输出。
44.假想输出是对磁传感器7的检测角的测量预定范围中的实际测量输出进行直线近似而求出的。具体而言,假想输出是利用最小二乘法将旋转角θ及实际测量输出以一次函数进行近似而求出的。
45.将实际测量输出与假想输出之差相对于磁传感器7中的输出的满量程的比率定义为磁传感器7的输出的线性误差率,该满量程为与磁传感器7中的检测角的测量预定范围对应的输出的最大值与最小值之间的间隔。
46.如图10所示,在磁传感器7的检测角的测量预定范围为直线lx之间的
±
20
°
的范围时,磁传感器7的输出的线性误差率为大约0.06%,在磁传感器7的检测角的测量预定范围为直线ly之间的
±
30
°
的范围时,磁传感器7的输出的线性误差率为大约0.2%,在磁传感器7的检测角的测量预定范围为直线lz之间的
±
50
°
的范围时,磁传感器7的输出的线性误差率为大约1.0%。
47.图12是表示在实验例所涉及的磁传感器的检测角的测量预定范围内、与磁传感器的输出的所需的线性误差率对应而旋转角和l1/l2可取的范围的曲线图。在图12中,纵轴表示l1/l2,横轴表示旋转角θ(deg)。
48.在以近似式y=-0.048x 0.96所示的直线l
20
上,能够在磁传感器7的检测角的测量预定范围为
±
20
°
的范围中,使磁传感器7的输出的线性误差率为大约0.06%以下。在以近似式y=-0.032x 0.96所示的直线l
30
上,能够在磁传感器7的检测角的测量预定范围为
±
30
°
的范围中,使磁传感器7的输出的线性误差率为大约0.2%以下。在以近似式y=-0.022x 1.0所示的直线l
50
上,能够磁传感器7的检测角的测量预定范围为
±
50
°
的范围中,
使磁传感器7的输出的线性误差率为大约1.0%以下。
49.由此,在直线l
50
与直线l
30
之间的区域、即满足-0.032
×
θ 0.96≦l1/l2≦-0.022
×
θ 1.0的关系的区域中,能够在磁传感器7的检测角的测量预定范围为
±
30
°
以上而
±
50
°
以下的范围中,使磁传感器7的输出的线性误差率为大约0.2%以上而大约1.0%以下。
50.在直线l
30
与直线l
20
之间的区域、即满足-0.048
×
θ 0.96≦l1/l2≦-0.032
×
θ 0.96的关系的区域中,能够在磁传感器7的检测角的测量预定范围为
±
20
°
以上而
±
30
°
以下的范围中,使磁传感器7的输出的线性误差率为大约0.06%以上而大约0.2%以下。
51.在直线l
20
以下的区域、即满足0≦l1/l2≦-0.048
×
θ 0.96的关系的区域中,能够在磁传感器7的检测角的测量预定范围为
±
20
°
以下的范围中,使磁传感器7的输出的线性误差率为大约0.06%以下。
52.这样,在本发明的一个实施方式所涉及的位置检测装置中,通过将磁传感器7配置于包含穿过位于基准位置b的位置检测用磁体6的中心6c的磁化方向m、以及旋转轴c的轴向的xz平面内,从而能够以简单的构成优化磁传感器7的检测角的测量预定范围即位置检测范围、及磁传感器7的输出的线性误差率即位置检测精度。
53.在本发明的一个实施方式所涉及的位置检测装置中,磁传感器7具有构成电桥电路的多个磁阻效应元件。由此,能够检测出沿着传感器基板7s的上表面的方向所施加的检测对象磁场。
54.此外,也可以在直线l
50
以下的区域即满足0≦l1/l2≦-0.022
×
θ 1.0的关系的区域、或者在直线l
30
以下的区域即满足0≦l1/l2≦-0.032
×
θ 0.96的关系的区域中,使用位置检测装置。
55.也可以在上述的实施方式的说明中,将可能组合的构成相互组合。
56.应该认为本次公开的实施方式的所有方面都仅为例示,并非限定的表达。本发明的范围并不由上述说明确定,而是由权利要求书的范围示出,其意图在于包括与权利要求书的范围等同的意义及范围内的所有变更。标号的说明
57.1紧凑型相机模块,2光学反射元件,3致动器部,4图像传感器,5固定部,6位置检测用磁体,6c、7c中心,7磁传感器,7s传感器基板,10tmr元件,10b多层元件,10c元件列,11下部电极层,12反铁磁层,13第一参考层,14非磁性中间层,15第二参考层,16隧道阻挡层,17自由层,18上部电极层,19中间电极层,20导线,b基准位置,c旋转轴,gnd接地端子,m磁化方向,mr1第一磁阻效应元件,mr2第二磁阻效应元件,mr3第三磁阻效应元件,mr4第四磁阻效应元件,v 第一输出端子,v-第二输出端子,vcc电源端子。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。