1.本发明涉及一种用于作业机械的作业机具的联动布置。本发明进一步涉及一种包括这种联动布置的作业机械,该作业机械通常是轮式装载机。
背景技术:
2.施工机械或作业机械被构造成通过作业机具进行作业。例如,作业机械可以被构造成提升、移动和倾卸负载。这种作业机械的一个例子是轮式装载机,例如铰接式轮式装载机。
3.轮式装载机通常包括被构造成操纵负载的作业机具,诸如铲斗。为了使作业机具相对于作业机械的框架移动,作业机械配备有联动布置。联动布置包括承载结构,诸如被构造成提升作业机具的提升臂。此外,作业机械可以包括某种类型的连接器机构或联接器,该连接器机构或联接器被构造成将作业机械连接到各种类型的作业机具。
4.联动布置具有大型封壳,该封壳设置在操作员的驾驶室前方且在作业机械的中央,当操作员试图操作作业机具时,导致视线受阻。作业机具本身也可能导致视线受阻。此外,为了正确操纵作业机具,例如为了使作业机具倾斜,可能需要额外的臂和致动器来实现作业机具的正确的扭矩分布和理想对准,这进一步导致视线受阻。
5.因此,在驾驶员的良好能见度和作业机具的令人满意的功能性之间存在折衷。因此,在工业中需要改进的联动布置。
技术实现要素:
6.本发明的一个目的是至少在一定程度上减轻上面讨论的关于联动布置的缺陷。
7.根据本发明的至少第一方面,提供了一种用于作业机械的联动布置,该联动布置能够连接到作业机具。该联动布置包括:单吊杆提升臂,其沿纵向中心轴线延伸并且被构造成提升作业机具;以及倾斜布置,该倾斜布置具有平行布置的两个液压驱动臂,并且该倾斜布置被构造成使作业机具相对于单吊杆提升臂倾斜,其中所述两个液压驱动臂中的每一个都由单独的液压倾斜缸液压驱动。
8.因此,就与作业机具相关的扭矩分布以及驾驶员的能见度而言,提供了改进的联动布置。此外,联动布置以有利的方式将平行对准与低重量相结合。换句话说,联动布置的构造在该联动布置和作业机具之间提供了特定的几何结构,该几何结构具有单吊杆提升臂的优点(例如,在所有位置都具有良好的能见度且重量轻),以及具有将两个液压驱动臂平行布置并且由相应的液压缸单独液压驱动(例如,扭矩分布和平行对准)以用于倾斜布置的优点。联动布置可以称为吊杆装载机机构。作业机具通常是被构造成执行作业的机具或附件,并且可以被称为附件或附接设备。
9.由于两个液压驱动臂中的每一个都由相应的液压倾斜缸液压驱动,因此倾斜布置可以被称为构造成由单独的液压缸液压驱动。
10.根据至少一个示例实施例,联动布置能够通过联接器连接到作业机具。联动布置
可以包括联接器,或者作业机具可以包括联接器。联接器通常包括:第一附接装置,用以连接到单吊杆提升臂;和第二附接装置,用以连接到两个液压驱动臂中的每一个。根据至少一个示例性实施例,联接器被构造成将作业机械联接到各种类型的作业机具。
11.根据至少一个示例性实施例,在横穿纵向中心轴线的方向上,两个液压驱动臂至少部分地布置在单吊杆提升臂的外部。
12.由此,就扭矩分布和平行对准而言,进一步改进了平行布置的并且由单独的液压缸单独液压驱动的两个液压驱动臂的构造的优点。根据至少一个示例性实施例,在横穿纵向中心轴线的方向上,两个液压驱动臂布置在单吊杆提升臂的外部,诸如完全在单吊杆提升臂的外部。根据至少一个示例性实施例,两个液压驱动臂中的每一个都沿着相应的纵向臂轴线延伸,其中两个纵向臂轴线布置成平行于单吊杆提升臂的纵向中心轴线,或至少布置在平行的竖直平面中。通常,单吊杆提升臂的纵向中心轴线布置在两个纵向臂轴线之间。
13.根据至少一个示例性实施例,单吊杆提升臂至少部分地由在纵向中心轴线的相对的两侧上延伸的两个横向侧限定并且在与纵向中心轴线相同的方向上,其中两个液压驱动臂布置在纵向中心轴线的相对的两侧上的横向侧的外部或至少部分地所述横向侧的外部。
14.根据至少一个示例性实施例,在横穿纵向中心轴线的方向上,液压倾斜缸至少部分地布置在单吊杆提升臂的外部。
15.由此,就扭矩分布和平行对准而言,进一步改进了平行布置的并且由单独的液压缸单独液压驱动的两个液压驱动臂的构造的优点。根据至少一个示例性实施例,在横穿纵向中心轴线的方向上,两个液压倾斜缸被布置在单吊杆提升臂的外部,诸如完全在单吊杆提升臂的外部。根据至少一个示例性实施例,两个液压倾斜缸中的每一个都在与对应的前述纵向臂轴线相同的竖直平面中延伸。因此,两个液压倾斜缸可以被称为布置成平行于单吊杆提升臂的纵向中心轴线或布置成至少在平行的竖直平面中。通常,单吊杆提升臂的纵向中心轴线布置在液压倾斜缸之间。
16.根据至少一个示例性实施例,两个液压倾斜缸被布置在单吊杆提升臂的横向侧的外部或至少部分地在所述横向侧的外部,并且布置在在纵向中心轴线的相对的两侧上。
17.根据至少一个示例实施例,液压倾斜缸被布置在单吊杆提升臂的纵向中心轴线的竖直下方。
18.液压倾斜缸的这种布置改进了倾斜布置的扭矩分布和平行对准。此外,通过将液压倾斜缸布置在单臂起重臂的纵向中心轴线的竖直下方,驾驶员的能见度得到改进。
19.根据至少一个示例实施例,两个液压驱动臂中的每一个都包括可连接到作业机具的第一端,并且包括连接到对应的液压倾斜缸的第二端。
20.每个液压驱动臂的第一端沿相应的纵向臂轴线布置在对应的第二端的相对侧上。液压倾斜缸被构造成将其诱导运动传递到液压驱动臂的相应的第二端,其中所述诱导运动进一步经由两个液压驱动臂传递到它们相应的第一端,以使作业机具倾斜。换言之,在单吊杆提升臂的第一侧边附近,第一液压倾斜缸被布置并且被构造成将其诱导运动传递到第一液压驱动臂的第二端,其中第一液压驱动臂被构造成进一步将诱导运动传递到其第一端,并且在单吊杆提升臂的第二侧附近,第二侧在横向方向上与第一侧相比布置在单吊杆提升臂的相对侧上,第二液压倾斜缸被布置并且被构造成将其诱导运动传递到第二液压驱动臂的第二端,其中第二液压驱动臂被构造成将诱导运动进一步传递到其第一端。
21.根据至少一个示例性实施例,两个液压驱动臂中的每一个都包括布置在相应的第一端和第二端之间的中间部分,其中每个中间部分旋转地联接到单吊杆提升臂。
22.因此,两个液压驱动臂中的每一个都被支撑,并且相对于单吊杆提升臂旋转地布置。因此,改进了倾斜布置的扭矩分布和平行对准。
23.根据至少一个示例实施例,中间部分是第一中间部分,并且两个液压驱动臂中的每一个都包括第二中间部分,该第二中间部分布置在相应的第一端和第一中间部分之间,其中该第二中间部分以可旋转地联接到单吊杆提升臂。
24.因此,两个液压驱动臂中的每一个进一步被支撑,并且相对于单吊杆提升臂被额外地旋转布置。因此,改进了倾斜布置的扭矩分布和平行对准。例如,第二中间部分中的每一个都经由相应的间隔臂旋转地联接到单吊杆提升臂。这种间隔臂通过独立于单吊杆提升臂的倾斜布置进一步提高将运动传递到作业机具的可能性。
25.根据至少一个示例实施例,单吊杆提升臂由液压提升缸液压驱动。
26.因此,与倾斜布置的液压驱动臂相比,单吊杆提升臂由单独的液压缸液压驱动。因此,改进了单个吊杆臂和倾斜布置相对于作业机具的独立运动的可能性。
27.根据至少一个示例性实施例,液压提升缸至少部分地布置在与液压倾斜缸相同的水平面中。
28.因此,提供了液压缸(即,两个液压倾斜缸和液压提升缸)的简洁或紧凑的布置。根据至少一个示例性实施例,如从横穿纵向中心轴线的方向所见,液压提升缸布置在两个液压倾斜缸之间。
29.根据至少一个示例性实施例,液压驱动臂中的每一个都是包括可枢转地相互互连的至少三个笔直子部分的连杆臂。
30.因此,倾斜布置的构造和扭矩分布得到改进。因此,每一个液压驱动臂都包括可枢转地相互连接彼此的至少三个笔直子部分或三个臂部分。通常,至少三个笔直子部分在所述笔直子部分的相应端部处可枢转地相互连接。例如,每一个液压驱动臂都包括第一笔直子部分,该第一笔直子部分具有第一端部分,该第一端部分连接到对应的液压倾斜缸,并且该第一笔直子部分具有第二端部分,该第二端部分沿第一笔直子部分布置成与所述第一端部分相对,其中该第二端部分可枢转地连接到第二笔直子部分的相应的第一端部分。此外,第二笔直子部分中的每一个都包括沿第二笔直子部分布置成与第一端部分相对的第二端部分等。因此,液压驱动臂中的每一个的第二端通常被包括在第一笔直子部分的相应的第一端部分中,并且每个液压驱动臂的第一端通常被包括在最后一个笔直子部分(例如,第三笔直子部分)的第二端部分中。根据至少一个示例实施例,相应的第一中间部分布置在液压驱动臂的第一笔直子部分中。根据至少一个示例实施例,相应的第二中间部分布置在液压驱动臂的第三笔直子部分中。液压驱动臂可以称为液压驱动臂布置或液压驱动连杆臂。
31.根据本发明的至少第二方面,提供了一种包括根据本发明的第一方面的联动布置的作业机械。
32.本发明的第二方面的效果和特征在很大程度上类似于上面结合本发明的第一方面描述的那些效果和特征。所提及的与本发明的第一方面有关的实施例在很大程度上与本发明的第二方面兼容,下面举例说明其中的一些实施例。
33.根据至少一个示例实施例,作业机械包括框架,该框架具有第一附接部分,该第一
附接部分将单吊杆提升臂可枢转地连接到所述框架,其中液压倾斜缸在第一附接部分的竖直下方附接到框架。该框架可以称为作业机械框架。
34.根据至少一个示例实施例,作业机械包括作业机具。因此,联动布置连接到作业机具。
35.根据至少一个示例实施例,作业机械是轮式装载机。根据至少一个示例实施例,作业机具是铲斗。
36.本公开的其它优点和特征在以下描述和附图中被公开和讨论。
附图说明
37.参考附图,以下是作为示例引用的本发明的实施例的更详细描述。在这些附图中:
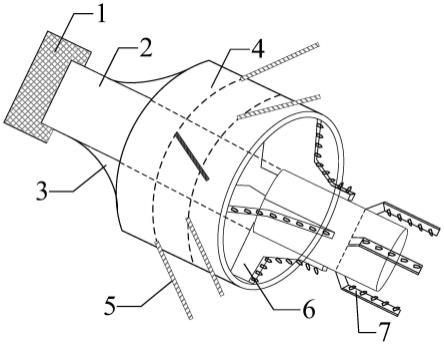
38.图1是根据本发明的示例性实施例的包括用于作业机具的联动布置的作业机械的示意性侧视图;
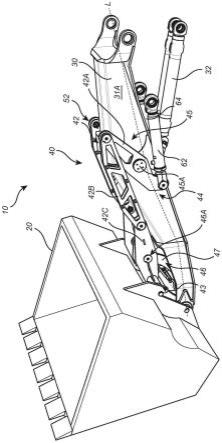
39.图2是根据本发明的示例性实施例的联动布置和作业机具的示意性侧视图;以及
40.图3是根据本发明的示例性实施例的图2的联动布置的示意性俯视图,其中没有作业机具。
具体实施方式
41.参考图1,公开了一种作业机械1,这里被实施为轮式装载机1,本发明中公开的一种联动布置10对该作业机械是有利。然而,联动布置10也可以在其它类型的作业机械中实施,诸如在例如挖掘机中。作业机械1可以是电动作业机械,诸如全电动作业机械或包括至少一个电动机的混合动力机器。这样的电机可以由可再充电的能量存储系统ress(诸如例如电池系统或燃料电池系统)供电。
42.如图1中所见,联动布置10连接到作业机具20,这里是铲斗20。联动布置10包括:单吊杆提升臂30,其被构造为提升作业机具20;以及倾斜布置40,其被构造为使作业机具20相对于单吊杆提升臂30倾斜。现在将参照图2-图3更详细地描述联动布置10。
43.图2是连接到图1的作业机具20的联动布置10的示意性侧视图,而图3是没有作业机具20的同一联动布置10的示意性俯视图。图2-图3所示的实施例因此可以在图1的作业机械1中实施。如图1所示,联动布置10包括单吊杆提升臂30和倾斜布置40。单吊杆提升臂30沿纵向中心轴线l延伸。单吊杆提升臂30不是均匀笔直的,而是略微弯曲的,或者由有限数量的组合笔直段形成。因此,单吊杆提升臂的纵向中心轴线l不形成笔直轴线,而是由对应的有限数量的组合直线段组合而成的轴线,其中直线段彼此成角度。在图2中,单吊杆提升臂30连接到或附接到作业机具20并且被构造成提升作业机具20,而倾斜布置40连接到或附接到作业机具20并且被构造成使作业机具20倾斜。倾斜布置40通常在单吊杆提升臂30连接到或附接到作业机具20的位置的竖直上方连接到或附接到作业机具20。
44.图2至图3的倾斜布置40包括两个液压驱动臂42、52,这里称为第一液压驱动臂42和第二液压驱动臂52。至少在图3中可见,第一和第二液压驱动臂42、52平行地布置并且布置在单吊杆提升臂30的不同侧上。此外,倾斜布置40包括两个液压倾斜缸62、64,这里称为第一液压倾斜缸62和第二液压倾斜液压缸64。第一液压倾斜缸62被构造成操作第一液压驱动臂42,而第二液压倾斜缸64被构造成操作第二液压驱动臂52,使得作业机具20相对于单
吊杆提升臂30倾斜。因此,两个液压驱动臂42、52中的每一个都由单独的液压倾斜缸62、64液压驱动。
45.如图3中最佳可见,在横穿t纵向中心轴线l的方向上,第一液压驱动臂42和第二液压驱动臂52至少部分地布置在单吊杆提升臂30的外部。单吊杆提升臂30包括第一联接部分32,该第一联接部分用于联接或附接到作业机械1或联接或附接到作业机械1的框架3(见图1),并且单吊杆提升臂30包括第二联接部分34,与第一联接部分32相比,该第二联接部分沿纵向中心轴线l布置在单吊杆提升臂30的相对侧上,第二联接部分34被构造用于联接或附接至作业机具20。单吊杆提升臂30进一步包括中间部分36,该中间部分构成单吊杆提升臂30沿纵向中心轴线l的总长度的大部分。中间部分36布置在第一联接部分32和第二联接部分34之间,例如,中间部分36可以从第一联接部分32延伸到第二联接部分34。如图3中可见,在横穿t纵向中心轴线l的方向上,第一液压驱动臂42和第二液压驱动臂52布置在单吊杆提升臂30的至少中间部分36的外部。换句话说,并且根据至少一个示例性实施例,在横穿t的纵向中心轴线l方向上,第一液压驱动臂42和第二液压驱动臂52沿单吊杆提升臂30的长度(沿纵向中心轴线l限定的长度)的至少大部分布置在单吊杆提升臂30的外部。
46.对应地,并且根据至少一个示例性实施例,在横穿t纵向中心轴线l的方向上,第一液压倾斜缸62和第二液压倾斜缸64至少部分地布置在单吊杆提升臂30的外部。如图3中可见,在横穿t纵向中心轴线l的方向上,第一液压倾斜缸62和第二液压倾斜气缸64布置在单吊杆提升臂30的至少中间部分36的外部。换一种说法,并且根据至少一个示例性实施例,与单吊杆提升臂30的长度的至少大部分相比,在横穿t纵向中心轴线l的方向上,第一液压倾斜缸62和第二液压倾斜缸64布置在单吊杆提升臂30的外部。
47.如图2所示,第一液压倾斜缸62和第二液压倾斜缸64布置在单吊杆提升臂30的纵向中心轴线l的竖直下方。即,至少在联动布置10的水平位置(即,在单吊杆提升臂30定位成从作业机械1的框架3水平伸出的位置),第一液压倾斜缸62和第二液压倾斜缸64布置在单吊杆提升臂30的纵向中心轴线l的竖直下方。
48.单吊杆提升臂30可以被描述为至少部分地由在纵向中心轴线l的相对的两侧上延伸的两个横向侧31a、31b限定并且在与纵向中心轴线l相同的方向上。因此,第一液压驱动臂42和第二液压驱动臂52布置在纵向中心轴线l的相对的两侧上的横向侧31a、31b的外部。对应地,液压倾斜缸62、64至少部分地布置在纵向中心轴线l的相对的两侧上的横向侧31a、31b的外部。
49.就与作业机具20相关的扭矩分布以及驾驶员的能见度而言,第一液压驱动臂42和第二液压驱动臂42、52以及第一液压倾斜缸62和第二液压倾斜缸64相对于单吊杆提升臂30及其纵向中心轴线l的定位提供了改进的联动布置10。
50.如在图2和图3中所见,第一液压驱动臂42和第二液压驱动臂52中的每一个都包括能够连接到作业机具20的第一端43、53,并且第一液压驱动臂42和第二液压驱动臂52中的每一个都包括连接到对应的液压倾斜缸62、64的第二端44、54。即,第一液压驱动臂42包括能够连接到作业机具20的第一端43,并且第一液压驱动臂42包括连接到第一液压倾斜缸62的第二端44。对应地,第二液压驱动臂52包括能够连接到作业机具20的第一端53,并且第二液压驱动臂52包括连接到第二液压倾斜缸64的第二端54。此外,在图2和图3的实施例中,第一液压驱动臂42和第二液压驱动臂52中的每一个都包括第一中间部分45、55,该第一中间
部分45、55布置在相应的第一端43、53和第二端44、54之间。每个第一中间部分45、55都旋转地联接到单吊杆提升臂30。对于第一液压驱动臂42,这在图2中示出为旋转联接器45a。对应的旋转联接器布置在用于第二液压驱动臂52的单吊杆提升臂30的另一横向侧31b上。此外,第一液压驱动臂42和第二液压驱动臂52中的每一个都包括第二中间部分46、56,该第二中间部分46、56布置在相应的第一端43、53和第一中间部分45、55之间。每个第二中间部分46、56以可旋转方式联接到单吊杆提升臂。对于第一液压驱动臂42,这在图2中被示出为旋转联接器46a。对应的旋转联接器布置在用于第二液压驱动臂52的单吊杆提升臂30的另一横向侧31b上。如图2所示,第一液压驱动臂42通过间隔臂47旋转地联接到单吊杆提升臂。对应的间隔臂布置在用于第二液压驱动臂52的单吊杆提升臂30的另一横向侧31b上。
51.单吊杆提升臂30由液压提升缸32液压驱动。液压提升缸32沿纵向中心轴线l布置,如通常竖直平行于单吊杆提升臂30布置的那样。此外,并且如图2可见,液压提升缸32至少部分地布置在与第一液压倾斜缸62和第二液压倾斜缸64相同的水平面中。因此,液压提升缸32布置在第一液压倾斜缸62和第二液压倾斜缸64之间,如在横穿t纵向中心轴线l的方向上所见。由此,提供了液压缸32、62、64的简明或紧凑的布置。
52.如图2中最佳所示,第一液压驱动臂42和第二液压驱动臂52中的每一个都是连杆臂42、52。在下文中,参照第一液压驱动臂描述这种连杆臂42、52的构造,但是也可以假定第二液压驱动臂52的对应构造。第一液压驱动臂42包括至少三个笔直子部分42a、42b、42c,这里称为可枢转地相互互连彼此的第一笔直子部分42a、第二笔直子部分42b和第三笔直子部分43b。笔直子部分42a、42b、42c可以称为臂部分42a、42b、42c。第一笔直子部分42a、第二笔直子部分42b和第三笔直子部分42c在笔直子部分42a、42b、42c的相应的端部分处可枢转地连接彼此。例如,第一笔直子部分42a包括连接到第一液压倾斜缸62的第一端部分,并且第一笔直子部分42a包括沿第一笔直子部分42a布置的与第一端部分相对的第二端部分,该第二端部分枢转地连接到第二笔直子部分42b的相应的第一端部分。此外,第二笔直子部分42b包括第二端部分,该第二端部分沿第二笔直子部分42b布置成与第一端部分相对,该第二端部分可枢转地连接到第三笔直子部分42c的第一端部分。因此,第一液压驱动臂42的第二端44通常被包括在第一笔直子部分42a及其第一端部分中,而第一液压驱动臂42的第一端43被包括在第三笔直子部分42c及其第二端部分中。在第一液压驱动臂42包括布置在第三笔直子部分42c之后的第四笔直子部分的情况下,第一液压驱动臂42的第一端43通常被包括在第四笔直子部分及其第二端部分中。通常,第一液压驱动臂42的布置成最靠近作业机具20或与该作业机具20连接的笔直子部分被称为最后的笔直子部分。如在图2中可见,第一液压驱动臂42的第一中间部分45布置在第一笔直子部分42a中,而第一液压驱动臂42的第二中间部分46布置在第三笔直子部分42c中。第一液压驱动臂42和第二液压驱动臂52可以相应地称为第一液压驱动臂和第二液压驱动臂布置或第一液压驱动连杆臂和第二液压驱动连杆臂。
53.简要地回到图1,示出了包括图2至图3的联动布置10以及呈铲斗20形式的作业机具20的作业机械1。作业机械1包括框架3,该框架3具有第一附接部分5,该第一附接部分5将单吊杆提升臂30可枢转地连接到框架3。此外,框架3包括将第一液压倾斜缸62和第二液压倾斜缸64中的每一个连接到框架3的第二附接部分7。第二附接部分7布置在第一附接部分5的竖直下方。
54.应当理解的是,本发明并不限于上述和附图中示出的实施例;相反,技术人员将认识到,可以在所附权利要求的范围内进行许多改变和修改。
55.此外,通过研究附图、公开内容和所附权利要求,本领域技术人员在实践要求保护的发明概念时可以理解和实现所公开实施例的变型。在权利要求中,“包括”一词不排除其它元件或步骤,而不定冠词“一(a)”或“一个(an)”不排除复数。在相互不同的从属权利要求中列举了某些措施这一事实并不表明这些措施的组合不能有利地使用。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。