技术特征:
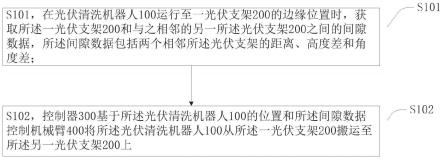
1.光伏清洗机器人的搬运方法,其特征在于,包括:在光伏清洗机器人运行至一光伏支架的边缘位置时,获取所述一光伏支架和与之相邻的另一光伏支架之间的间隙数据,所述间隙数据包括两个相邻所述光伏支架的距离、高度差和角度差;基于所述光伏清洗机器人的位置和所述间隙数据控制机械臂将所述光伏清洗机器人从所述一光伏支架搬运至所述另一光伏支架上。2.根据权利要求1所述的光伏清洗机器人的搬运方法,其特征在于,所述的获取所述一光伏支架和与之相邻的另一光伏支架之间的间隙数据,包括:获取所述一光伏支架和与之相邻的另一光伏支架之间的影像数据;基于视觉识别算法对所述影像数据进行处理,以确定所述一光伏支架和与之相邻的另一光伏支架之间的间隙数据。3.根据权利要求1所述的光伏清洗机器人的搬运方法,其特征在于,在所述的获取所述一光伏支架和与之相邻的另一光伏支架之间的间隙数据之后,还包括:通过安装于所述光伏清洗机器人的距离传感器确定所述光伏清洗机器人位于所述光伏支架的位置;和/或,获取所述光伏清洗机器人在位于所述光伏支架处的影像数据,基于所述影像数据采用视觉识别算法进行处理,确定所述光伏清洗机器人位于所述光伏支架的位置。4.根据权利要求1所述的光伏清洗机器人的搬运方法,其特征在于,在所述的基于所述光伏清洗机器人的位置和所述间隙数据控制机械臂将所述光伏清洗机器人从所述一光伏支架搬运至所述另一光伏支架上之后,进一步包括:通过安装于所述光伏清洗机器人的相机获取所述另一光伏支架的影像信息,通过视觉识别算法对所述影像信息进行处理,以判断所述光伏清洗机器人是否到达所述另一光伏支架;响应于所述光伏清洗机器人到达所述另一光伏支架,控制所述机械臂松开所述光伏清洗机器人,并控制所述光伏清洗机器人继续运行。5.根据权利要求1-4中任一项所述的光伏清洗机器人的搬运方法,其特征在于,所述机械臂安装于所述光伏支架,所述光伏支架用于支撑所述机械臂,所述光伏支架的边缘设有桥架,所述光伏清洗机器人能够在所述桥架悬停,以便于所述机械臂搬运。6.根据权利要求1-4中任一项所述的光伏清洗机器人的搬运方法,其特征在于,所述的基于所述光伏清洗机器人的位置和所述间隙数据控制机械臂将所述光伏清洗机器人从所述一光伏支架搬运至所述另一光伏支架上之前,包括:当所述机械臂安装于移动设备,且所述移动设备能够在并排设置的光伏支架之间的地面通道移动时,根据所述移动设备搭载的距离传感器测量所述移动设备与所述光伏清洗机器人之间的距离数据;基于所述距离数据调整所述移动设备的位置,以调整所述移动设备相对于所述光伏清洗机器人的位置。7.根据权利要求1-4中任一项所述的光伏清洗机器人的搬运方法,其特征在于,所述的基于所述光伏清洗机器人的位置和所述间隙数据控制机械臂将所述光伏清洗机器人从所述一光伏支架搬运至所述另一光伏支架上,具体包括:
当所述机械臂安装于所述光伏清洗机器人,且对称安装于所述光伏清洗机器人的两侧,基于所述光伏清洗机器人的位置和所述间隙数据控制对称安装的所述机械臂的远端跨过两个相邻所述光伏支架之间的间隙,并抓握相邻的所述另一光伏支架的边缘;以所述机械臂的远端在所述另一光伏支架的抓握点为支撑,控制所述机械臂带动所述光伏清洗机器人跨越所述间隙从所述一光伏支架搬运至所述另一光伏支架上。8.光伏清洗系统,其特征在于,包括:光伏清洗机器人,包括机器人主体、安装于所述机器人主体的间隙检测模块以及控制器,所述间隙检测模块用于在光伏清洗机器人运行至一光伏支架的边缘预置时,获取所述一光伏支架和与之相邻的另一光伏支架之间的间隙数据,所述间隙数据包括两个相邻光伏支架之间的距离、高度差和角度差;机械臂,能够基于所述光伏清洗机器人的位置和所述间隙数据控制机械臂将所述光伏清洗机器人从所述一光伏支架搬运至所述另一光伏支架上。9.根据权利要求8所述的光伏清洗系统,其特征在于,所述间隙检测模块包括相机,通过安装于所述光伏清洗机器人的相机获取所述一光伏支架和与之相邻的另一所述光伏支架之间的影像数据,基于视觉识别算法能够对所述影像数据进行处理,以确定相邻所述光伏支架之间的间隙数据。10.根据权利要求8所述的光伏清洗系统,其特征在于,所述光伏清洗机器人上还安装有距离传感器,用于确定所述光伏清洗机器人位于所述光伏支架的位置;和/或,所述机械臂上设置有视觉相机,用于获取所述光伏清洗机器人的影像数据,基于所述影像数据采用视觉识别算法进行处理能够确定所述光伏清洗机器人位于所述光伏支架的位置。11.根据权利要求9所述的光伏清洗系统,其特征在于,所述相机还用于获取相邻所述另一光伏支架的影像信息,通过视觉识别算法对所述影像信息进行处理,以判断所述光伏清洗机器人是否到达相邻所述另一光伏支架。12.根据权利要求8~11中任一项所述的光伏清洗系统,其特征在于,所述机械臂安装于所述光伏支架,所述光伏支架用于支撑所述机械臂,所述光伏支架的边缘设有桥架,所述光伏清洗机器人能够在所述桥架悬停,以便于所述机械臂搬运。13.根据权利要求8~11中任一项所述的光伏清洗系统,其特征在于,所述机械臂安装于移动设备,所述移动设备能够在并排设置的光伏支架之间的地面通道移动;所述移动设备搭载有距离传感器,用于测量所述移动设备与所述光伏清洗机器人之间的距离数据,基于所述距离数据能够调整所述移动设备的位置,以调整所述移动设备相对于所述光伏清洗机器人的位置。14.根据权利要求8~11中任一项所述的光伏清洗系统,其特征在于,两个所述机械臂安装于所述光伏清洗机器人,且对称安装于所述光伏清洗机器人的两侧,控制对称安装的所述机械臂的远端跨过两个相邻所述光伏支架之间的间隙,并抓握相邻所述光伏支架的边缘,以所述机械臂的远端在相邻所述光伏支架的抓握点为支撑,控制所述机械臂带动所述光伏清洗机器人跨越所述间隙移动至相邻所述光伏支架。
技术总结
本发明公开了光伏清洗机器人的搬运方法及光伏清洗系统,光伏清洗机器人的搬运方法,包括:在光伏清洗机器人运行至一光伏支架的边缘位置时,获取所述一光伏支架和与之相邻的另一光伏支架之间的间隙数据,所述间隙数据包括两个相邻所述光伏支架的距离、高度差和角度差;基于所述光伏清洗机器人的位置和所述间隙数据控制机械臂将所述光伏清洗机器人从所述一光伏支架搬运至所述另一光伏支架上。当光伏清洗机器人运行至光伏支架的边缘位置时,能够通过机械臂将光伏清洗机器人搬运至相邻光伏支架,能够在相邻光伏支架之间具有较大间隙、较大角度或较大落差的情况下将光伏支架搬运至相邻光伏支架,能够适用于铺设于各种地形环境的光伏支架。境的光伏支架。境的光伏支架。
技术研发人员:孙欣 于涛 白亮亮
受保护的技术使用者:湖州丽天智能科技有限公司
技术研发日:2022.11.18
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。