1.本发明属于计算机工业应用技术领域,具体涉及一种焦炉四大车基于计算机视觉的定位方法、控制方法和装置。
背景技术:
2.焦炉四大机车自动化系统的目标就是通过推焦车、拦焦车、装煤车、熄焦车各自位置的精准测量和相互之间可靠的数据通讯来实现四大机车推焦联锁和协调工作,以及在生产控制下自动行车、自动定位、自动操作,从而实现四大机车的自动化生产运行和计算机生产管理和最终机车的无人驾驶。
3.机车定位技术是焦炉机车自动化的关键技术,也是实现机车无人化操作核心问题。当前国内外的定位技术主要有旋转编码器位置检测、读携码器编码位置检测、红外定位技术、编码电缆位置检测、条形码位置检测、电磁感应技术等。焦化厂目前采用的四车定位技术存在以下缺点:
4.1)旋转编码器位置检测技术:长期工作累计误差大,定位精度不高;
5.2)读携码器编码位置检测、红外定位技术:只能单点定位,可靠性不高,故障率高,维护成本高;
6.3)编码电缆位置检测:定位精度最高至
±
5mm,定位精度不高,一旦损坏需更换整条编码电缆,维护成本高。
技术实现要素:
7.为克服现有技术中的至少一个技术问题,本发明提供一种焦炉四大车基于计算机视觉的定位方法、控制方法和装置,可以兼顾精度和成本。
8.本发明的技术方案为:焦炉四大车基于计算机视觉的定位方法,包括:
9.控制安装在机车上的相机实时拍摄图像,提取所述相机在炉号标识物处于相机拍摄范围时所拍摄的第一图像;
10.将所述第一图像与预先存储的图像库中的各个第二图像进行对比,以识别所述机车所在的炉号,以及,提取所述相机与相应所述炉号标识物的偏移量,其中,所述图像库中的各个第二图像是拍摄各个炉号标识物得到的图像;
11.根据所述炉号和所述偏移量确定定位信息。
12.进一步,所述将所述第一图像与预先存储的图像库中的各个第二图像进行对比之前,所述方法还包括:
13.对第一图像进行预处理,对预处理后的所述第一图像进行边缘提取处理,所述边缘提取处理后的第一图像用于与所述第二图像对比。
14.进一步,所述预处理包括消除噪声处理和图像增强处理中的至少一种,所述边缘提取处理包括二值化处理和灰度值处理中的至少一种。
15.进一步,所述炉号标识物包括刻度尺、色卡或者数字炉号标识牌。
16.进一步,所述将所述第一图像与预先存储的图像库中的各个第二图像进行对比,以识别所述机车所在的炉号,包括:
17.根据将所述第一图像与预先存储的图像库中的各个第二图像进行对比的对比结果,确定与第一图像相似度超过预设值的第二图像;
18.以所述第二图像对应的炉号作为所述机车所在的炉号。
19.进一步,所述定位信息包括所述炉号和所述偏移量,或,所述定位信息包括根据所述炉号和所述偏移量确定所述机车与所述炉号之间的相对位置。
20.本发明的一种控制方法的技术方案为,将定位信息发送到中控模块,由所述中控模块进行四车联锁控制。
21.本发明的一种定位装置的技术方案包括:
22.提取模块,用于控制安装在机车上的相机实时拍摄图像,提取所述相机在炉号标识物处于相机拍摄范围时所拍摄的第一图像;
23.第一确定模块,用于将所述第一图像与预先存储的图像库中的各个第二图像进行对比,识别所述机车所在的炉号,以及,提取所述相机与相应所述炉号标识物的偏移量,其中,所述图像库中的各个第二图像是拍摄各个炉号标识物得到的图像;
24.第二确定模块,用于根据所述炉号和所述偏移量确定定位信息。
25.进一步,所述装置还包括:处理模块,用于在将所述第一图像与预先存储的图像库中的各个第二图像进行对比之前,对所述第一图像进行预处理,对预处理后的所述第一图像进行边缘提取处理。
26.本发明的一种控制装置的技术方案为:包括发送模块和定位装置;所述发送模块,用于根据将第二确定模块确定的定位信息发送到plc中控模块;所述中控模块,用于根据所述定位信息进行四车联锁控制。
27.本发明具有以下技术效果:
28.1)本发明的定位方法具有更高定位精度,使得四车联锁控制的实现能使四车运行平稳安全,避免了四大车在生产过程中因走位出现问题而导致的事故,从而增加了焦炉机车和焦炉本体的使用寿命,确保了操作严格按工艺执行,使焦炭质量得到了较大的提高,这也同时提高了生产的自动化程度,提高了生产效率,而且也减轻了操作人员的劳动强度,从整体上能够带来很大的经济效益。
29.2)本发明利用计算机视觉由于可以快速获取大量信息,并且成本低廉、易于自动处理,已成功地应用于工业生产领域,大幅度地提高了生产自动化水平和产品的质量及可靠性。计算机视觉硬件配置简单,工业计算机 高速工业相机 炉号标识物即可对目标作业炉号进行精准定位,硬件配置成本低。
30.3)本发明定位精度高,设备后期维护成本低,计算机视觉定位技术在焦化行业四车定位上的应用为世界首创。
附图说明
31.图1为本发明的流程图。
具体实施方式
32.焦炉主要设备有焦炉加热交换设备(交换机),以及推焦车、拦焦车、熄焦车和装煤车,统称为“四车一机”,后者通常被称为“四大车”。焦炉的生产操作是在各种机械相互配合下完成的。在焦炉机械水平逐步提高的情况下,四大车之间的协调工作,相互间的通信、地址炉号对位、推焦动作联锁、装煤动作联锁以及最终达到计算机集中联控等一系列自动化技术问题的解决,对焦化厂提高生产管理水平、产品质量和经济效益有着十分重要的意义。同时,四车联锁的实现能够确保生产安全和生产严格按计划运行。
33.实现四车联锁的关键技术是对四大车作业炉号的精准定位。计算机视觉定位技术的应用是实现对四大车目标作业炉号进行精准定位的有效方法。
34.实施例1:
35.焦炉四大车基于计算机视觉的定位方法,包括:
36.控制安装在机车上的相机实时拍摄图像,提取所述相机在炉号标识物处于相机拍摄范围时所拍摄的第一图像;
37.将所述第一图像与预先存储的图像库中的各个第二图像进行对比,以识别所述机车所在的炉号,以及,提取所述相机与相应所述炉号标识物的偏移量,其中,所述图像库中的各个第二图像是拍摄各个炉号标识物得到的图像;根据所述炉号和所述偏移量确定定位信息。
38.例如:计算所述相机中心坐标与相应所述炉号标识物中心坐标的偏移量,作为相机与相应所述炉号标识物的偏移量。相机中心坐标与相应所述炉号标识物中心坐标的偏移量可以利用已有的相机中心坐标与相配拍摄的图像物体中心坐标的偏移量计算方法得到。
39.进一步,上述将所述第一图像与预先存储的图像库中的各个第二图像进行对比之前,所述方法还包括:
40.对第一图像进行预处理,对预处理后的所述第一图像进行边缘提取处理,所述边缘提取处理后的第一图像用于与所述第二图像对比。
41.进一步,上述预处理包括消除噪声处理和图像增强处理中的至少一种,所述边缘提取处理包括二值化处理和灰度值处理中的至少一种。
42.进一步,上述炉号标识物包括刻度尺、色卡或者数字炉号标识牌。
43.进一步,上述将所述第一图像与预先存储的图像库中的各个第二图像进行对比,以识别所述机车所在的炉号,包括:
44.根据将所述第一图像与预先存储的图像库中的各个第二图像进行对比的对比结果,确定与第一图像相似度超过预设值的第二图像;
45.以所述第二图像对应的炉号作为所述机车所在的炉号。
46.进一步,上述定位信息包括所述炉号和所述偏移量,或,所述定位信息包括根据所述炉号和所述偏移量确定所述机车与所述炉号之间的相对位置。
47.本发明的一种控制方法的技术方案为,将定位信息发送到中控模块,由所述中控模块进行四车联锁控制。
48.本发明的一种定位装置的技术方案包括:
49.提取模块,用于控制安装在机车上的相机实时拍摄图像,提取所述相机在炉号标识物处于相机拍摄范围时所拍摄的第一图像;
50.第一确定模块,用于将所述第一图像与预先存储的图像库中的各个第二图像进行对比,识别所述机车所在的炉号,以及,提取所述相机与相应所述炉号标识物的偏移量,其中,所述图像库中的各个第二图像是拍摄各个炉号标识物得到的图像;
51.第二确定模块,用于根据所述炉号和所述偏移量确定定位信息(可以是炉号和偏移量本身)。进一步,所述装置还包括:处理模块,用于在将所述第一图像与预先存储的图像库中的各个第二图像进行对比之前,对所述第一图像进行预处理,对预处理后的所述第一图像进行边缘提取处理。
52.本发明的一种控制装置,包括发送模块和定位装置;所述发送模块,用于根据将第二确定模块确定的定位信息发送到plc中控模块;所述中控模块,用于根据所述定位信息进行四车联锁控制。
53.实施例2:
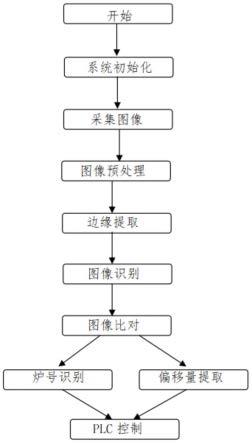
54.如图1所示,在系统识别炉号之前,摄取所有炉号标识牌的图像生成图像库。系统工作时,相机打开并实时抓取图像,摄像车辆行走时,炉号标识牌进入相机范围时,相机对号码标识牌进行图像识别比对,用halcon视觉图形处理软实时分析出目标炉号数字,并实时分析出相机中心坐标与炉号标识牌中心坐标的偏移量。有了炉号和偏移量,即可确定机车相对炉号标识牌中心的相对位置。工控机经过软件分析处理后,采用无线通讯的方式,将识别到的炉号和坐标偏移量传给中控plc,由plc来控制走行,并根据定位位置进行四车联锁控制。
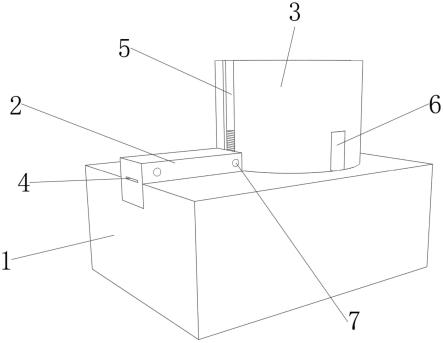
55.系统组成:焦炉四大车计算机视觉定位系统由工控机,高分辨率可变焦距工业高速相机,图像采集卡、炉号标识牌、稳定光源,ap cpe无线网络,中控plc等组成。
56.图像识别软件系统是整个计算机视觉定位系统的核心和关键技术所在,其算法好坏直接关系到系统的运行速度、识别准确性。图像识别软件系统主要包括:图像预处理,边缘提取和图像识别三个部分。图像软件识别软件系统软件流程图如下:
57.(1)图像预处理处理:
58.通过工业相机摄取到的号码标识牌图像在传输、转换过程中不可避免的产生一些噪声,因此在进行图像处理之前必须先进行消除噪声、图像增强的图像预处理。噪声给图像处理带来很多困难,对图像分割、边缘提取、图像识别等后续图像处理有直接的影响。因此实时采集的号码标识牌图像需进行滤波处理。
59.(2)边缘提取:
60.为了在图像识处理中将炉号标识牌图像从复杂的背景中分离出来,对得到的零件边缘图像进行二值化处理、灰度值处理。
61.(3)图像识别:
62.机车行走时,通过对实时采集图像与预先存储标识牌图像进行比对,分析出号码牌数字和相机中心与炉号标识牌的偏移量。通过无线通讯将数据传输给中控plc,进行联锁控制。
63.对技术方案中炉号标识牌的选择,数字标识牌只是作为标识物的一种,也可以通过比如刻度尺、色卡等方式替代炉号标识牌。
64.总之,本发明定位速度快,并且可以长时间工作,可以达到24小时全天运行。在焦化厂生产作业中,还是主要依靠大车操作工肉眼识别炉体号牌,驾驶机车进行找中对位,长
时间作业,操作工人眼睛容易疲劳,并且容易受情绪的影响,严重时会导致生产事故。每个操作工对目标作业炉号中心判断会有轻微差异,需要丰富经验的操作工才能胜任。生产节奏紧张时,靠人工快速定位无法保证。计算机视觉定位技术不但克服了传统人工炉号定位方法的缺点,同时也发挥了自己快速准确的优点。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。