1.本发明总的来说涉及航天器地面仿真技术领域。具体而言,本发明涉及一种航天器地面姿态动力学建模仿真方法。
背景技术:
2.随着航天器在轨任务和需求的增加,对航天器平台的能力要求也逐步提升。例如航天器在轨需要具有提供持续的能源供给、快速建立链路、敏捷的机动、组网编队飞行、轨道转移和交会对接等能力。为了满足上述需求和能力,目前航天器大多都需要配置大面积挠性太阳帆板、可展开天线和填充燃料的贮箱。
3.由于上述配置的增加,航天器在轨运行姿态动力学将由之前简单的刚体姿态动力学变为复杂的刚体
‑
液体
‑
挠性高度耦合姿态动力学,同时在轨扰动较之前的单纯的外界环境扰动增加了挠性振动和液体晃动影响,航天器姿态动力学和在轨扰动变得日益复杂。因此在地面建立一种精准的航天器地面姿态动力学模型,从而为后续航天器姿轨控分系统设计、分析和数学仿真验证提供保障是目前航天器整个生命周期的重点和难点。
技术实现要素:
4.为至少部分解决现有技术中的上述问题,本发明提出一种航天器地面姿态动力学建模仿真方法,包括:
5.确定航天器地面姿态动力学的建模部组件,所述建模部组件包括中心刚体、挠性附件、转动附件以及充液贮箱;
6.确定航天器地面姿态动力学的理论模型;
7.根据所述理论模型将所述建模部组件进行模块化拆分建模为航天器的地面姿态动力学模块,其中所述地面姿态动力学模块包括:
8.刚挠模块,其中对所述中心刚体和所述挠性附件统一建模;
9.转动附件模块,其中对所述转动附件建模;以及
10.液体晃动模块,其中对所述充液贮箱建模;
11.确定所述地面姿态动力学模块的配置项、输入项、输出项以及辅助分析量,并且确定所述地面姿态动力学模块的各模块之间的级联关系;以及
12.利用所述地面姿态动力学模块构建航天器地面姿态动力学模型。
13.在本发明一个实施例中规定,所述挠性附件包括太阳帆板、可展开天线以及长杆;
14.所述转动附件包括反作用飞轮、载荷转台以及帆板驱动机构;以及
15.所述充液贮箱包括双组元氧化剂及燃烧剂贮箱、单组元无水肼贮箱以及冷气推进液氮贮箱。
16.在本发明一个实施例中规定,确定航天器地面姿态动力学的理论模型包括:
17.确定带转动附件的刚体动力学理论模型,其中将刚体转动方程表示为下式:
18.19.其中,j表示航天器转动惯量、ω表示航天器角速度、h表示反作用飞轮以及载荷转台产生的角动量、表示反作用飞轮以及载荷转台产生的力矩、t
c
表示控制力矩以及t
d
表示扰动力矩;
20.确定所述载荷转台的转台转动方程,表示为下式:
[0021][0022][0023]
其中,α表示绕x轴旋转角度,β表示绕y轴旋转角度,h
t
表示载荷转台在航天器本体坐标系下的三轴角动量向量,h
tb
表示载荷转台在载荷转台本体坐标系下的三轴角动量向量,表示载荷转台在航天器本体坐标系下的三轴力矩向量,表示载荷转台在载荷转台本体坐标系下的三轴力矩向量;
[0024]
确定挠性附件动力学理论模型,其中将挠性状态方程表示为下式:
[0025][0026]
其中,c
c
表示刚体与挠性附件耦合矩阵、p表示挠性附件模态位移、ξ表示挠性附件阻尼比以及ω表示挠性附件模态角频率矩阵;
[0027]
确定液体晃动等效单摆理论模型,表示为下式:
[0028][0029]
其中,a、b、c、d分别表示第一至第四刚体与液体晃动耦合矩阵,m表示晃动液体质量矩阵,k表示刚度矩阵以及η表示等效单摆模态位移;以及
[0030]
确定混合航天器姿态动力学理论模型,表示为下式:
[0031][0032]
其中,p表示阻尼矩阵。
[0033]
在本发明一个实施例中规定,所述刚挠模块的配置项包括:
[0034]
刚体配置项,其中包括刚体质量、刚体质心位置以及刚体转动惯量;以及
[0035]
挠性附件配置项,其中包括太阳帆板个数、挠性附件安装位置、挠性附件平动耦合系数、挠性附件转动耦合系数、刚度矩阵以及阻尼矩阵;
[0036]
所述刚挠模块的输入项包括控制力矩、扰动力矩以及转动附件角动量,其中所述扰动力矩包括转动附件对航天器本体作用力矩以及充液贮箱对航天器本体作用力矩;
[0037]
所述刚挠模块的输出项包括航天器姿态信息,所述航天器姿态信息包括姿态角、姿态角速度以及姿态四元数;
[0038]
所述刚挠模块的辅助分析量包括混合体转动惯量、太阳帆板模态位移、太阳帆板受到的力矩以及中心刚体受到的力矩;
[0039]
所述转动附件模块的配置项包括载荷转台个数、转动附件安装位置以及转动附件质量;
[0040]
所述转动附件模块的输入项包括转动附件导引律以及航天器姿态信息;
[0041]
所述转动附件模块的输出项包括转动附件对航天器本体作用力矩、转动附件角动量以及转动附件微振动力;
[0042]
所述转动附件的辅助分析量包括转动附件转速;
[0043]
所述液体晃动模块的配置项包括充液贮箱个数、晃动质量、静止质量、等效摆长、阻尼比、静止质量位置向量、悬挂点位置向量以及静止质量惯量;
[0044]
所述液体晃动模块的输入项包括航天器纵向加速度、航天器横向加速度、航天器平动加速度以及航天器姿态信息;
[0045]
所述液体晃动模块的输出项包括充液贮箱对航天器本体作用力以及充液贮箱对航天器本体作用力矩;以及
[0046]
所述液体晃动模块的辅助分析量包括单摆模态位移、单摆模态频率以及转动惯量。
[0047]
在本发明一个实施例中规定,所述地面姿态动力学模块的各模块之间的级联关系包括:
[0048]
所述刚挠模块将航天器姿态信息输出至所述转动附件模块以及所述液体晃动模块;
[0049]
所述转动附件模块输出转动附件对航天器本体作用力矩、转动附件角动量以及转动附件微振动力至所述刚挠模块;以及
[0050]
所述液体晃动模块输出航天器本体作用力、充液贮箱对航天器本体作用力矩以及充液贮箱质量特性至所述刚挠模块。
[0051]
在本发明一个实施例中规定,利用所述地面姿态动力学模块构建航天器地面姿态动力学模型包括:
[0052]
进行所述地面姿态动力学模块的配置和封装;
[0053]
进行所述地面姿态动力学模块的级联和封装;以及
[0054]
设置所述地面姿态动力学模块的开关状态。
[0055]
在本发明一个实施例中规定,通过建立动态链接库以进行所述地面姿态动力学模块的封装。
[0056]
在本发明一个实施例中规定,基于所述航天器地面姿态动力学的理论模型进行数学仿真验证。
[0057]
在本发明一个实施例中规定,基于所述航天器地面姿态动力学模型进行航天器的半/全物理仿真以及模飞、伴飞试验。
[0058]
本发明至少具有如下有益效果:通过精准并且快速高效的航天器地面姿态动力学建模可以为后续航天器姿轨控分系统设计、分析和数学仿真验证提供有力的保障,并且可
以为后续航天器地面半物理、全物理仿真验证和在轨飞行提供有力的支撑。
附图说明
[0059]
为进一步阐明本发明的各实施例中具有的及其它的优点和特征,将参考附图来呈现本发明的各实施例的更具体的描述。可以理解,这些附图只描绘本发明的典型实施例,因此将不被认为是对其范围的限制。在附图中,为了清楚明了,相同或相应的部件将用相同或类似的标记表示。
[0060]
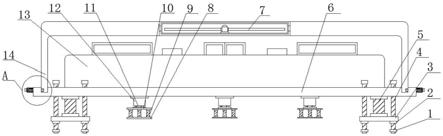
图1a示出了本发明一个实施例中航天器的结构示意图。
[0061]
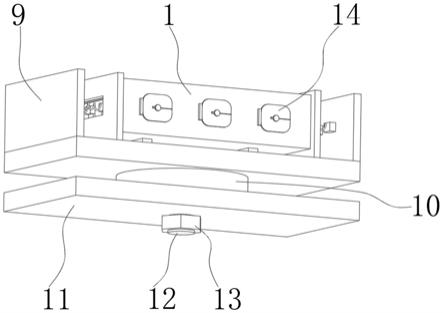
图1b示出了本发明一个实施例中航天器地面姿态动力学的建模部组件示意图。
[0062]
图2示出了本发明一个实施例中进行模块化拆分建模的示意图。
[0063]
图3a示出了本发明一个实施例中刚挠模块的配置示意图。
[0064]
图3b示出了本发明一个实施例中转动附件模块的配置示意图。
[0065]
图3c示出了本发明一个实施例中液体晃动模块的配置示意图。
[0066]
图4示出了本发明一个实施例中地面姿态动力学模块的各模块之间的级联关系级联关系示意图。
具体实施方式
[0067]
应当指出,各附图中的各组件可能为了图解说明而被夸大地示出,而不一定是比例正确的。在各附图中,给相同或功能相同的组件配备了相同的附图标记。
[0068]
在本发明中,除非特别指出,“布置在
…
上”、“布置在
…
上方”以及“布置在
…
之上”并未排除二者之间存在中间物的情况。此外,“布置在
…
上或上方”仅仅表示两个部件之间的相对位置关系,而在一定情况下、如在颠倒产品方向后,也可以转换为“布置在
…
下或下方”,反之亦然。
[0069]
在本发明中,各实施例仅仅旨在说明本发明的方案,而不应被理解为限制性的。
[0070]
在本发明中,除非特别指出,量词“一个”、“一”并未排除多个元素的场景。
[0071]
在此还应当指出,在本发明的实施例中,为清楚、简单起见,可能示出了仅仅一部分部件或组件,但是本领域的普通技术人员能够理解,在本发明的教导下,可根据具体场景需要添加所需的部件或组件。另外,除非另行说明,本发明的不同实施例中的特征可以相互组合。例如,可以用第二实施例中的某特征替换第一实施例中相对应或功能相同或相似的特征,所得到的实施例同样落入本技术的公开范围或记载范围。
[0072]
在此还应当指出,在本发明的范围内,“相同”、“相等”、“等于”等措辞并不意味着二者数值绝对相等,而是允许一定的合理误差,也就是说,所述措辞也涵盖了“基本上相同”、“基本上相等”、“基本上等于”。以此类推,在本发明中,表方向的术语“垂直于”、“平行于”等等同样涵盖了“基本上垂直于”、“基本上平行于”的含义。
[0073]
另外,本发明的各方法的步骤的编号并未限定所述方法步骤的执行顺序。除非特别指出,各方法步骤可以以不同顺序执行。
[0074]
下面结合具体实施方式参考附图进一步阐述本发明。
[0075]
步骤一、对影响航天器姿态动力学建模的航天器部件进行识别和分类以确定航天器地面姿态动力学的建模部组件。
[0076]
图1a示出了本发明一个实施例中航天器的结构示意图,其中航天器主体内部布置有充液贮箱,航天器主体外可以布置有挠性附件,所述挠性附件例如可以包括长杆、太阳帆板以及可展开天线(图1a中未示出)。所述挠性附件可以通过转动附件与航天器连接。
[0077]
对于航天器部件进行识别和分类可以确定所述建模部组件,如图1b所示,所述建模部组件可以包括中心刚体、挠性附件、转动附件以及充液贮箱,并且所述建模部组件之间可能存在关联和耦合。中心刚体可以包括航天器主体。挠性附件可以包括大尺寸的太阳帆板、可展开天线以及长杆。转动附件可以包括反作用飞轮、载荷转台以及帆板驱动机构。充液贮箱可以包括双组元氧化剂及燃烧剂贮箱、单组元无水肼贮箱以及冷气推进液氮贮箱。上述建模部组件之间的关联耦合主要包括转动部件以及挠性附件之间的级联,具体而言可以包括太阳帆板与帆板驱动之间的关联耦合以及可展开天线与载荷转台之间的关联耦合。
[0078]
步骤二、基于所述建模部组件进行刚体
‑
液体
‑
挠性航天器姿态动力学理论建模以确定航天器地面姿态动力学的理论模型,其中包括:
[0079]
确定带转动附件的刚体动力学理论模型,其中将刚体转动方程表示为下式:
[0080][0081]
其中,j表示航天器转动惯量、ω表示航天器角速度、h表示反作用飞轮以及载荷转台产生的角动量、表示反作用飞轮以及载荷转台产生的力矩、t
c
表示控制力矩以及t
d
表示扰动力矩。
[0082]
根据所述刚体转动方程考虑转动附件对航天器造成的影响,其中反作用飞轮是固定安装,因此反作用飞轮对航天器主体的影响可以通过固定的安装矩阵得到。由于载荷转台相对于航天器主体是时变运动,所以载荷转动对航天器主体的影响是与转台转动角度有关的时变矩阵,也就是说所述载荷转台的转台转动方程可以根据转台转动角度获得,所述转台转动方程表示为下式:
[0083][0084][0085]
其中,α表示绕x轴旋转角度,β表示绕y轴旋转角度,h
t
表示载荷转台在航天器本体坐标系下的三轴角动量向量,h
tb
表示载荷转台在载荷转台本体坐标系下的三轴角动量向量,表示载荷转台在航天器本体坐标系下的三轴力矩向量,表示载荷转台在载荷转台本体坐标系下的三轴力矩向量。
[0086]
确定挠性附件动力学理论模型,其中将挠性状态方程表示为下式:
[0087][0088]
其中,c
c
表示刚体与挠性附件耦合矩阵、ρ表示挠性附件模态位移、ξ表示挠性附件
阻尼比以及ω表示挠性附件模态角频率矩阵。
[0089]
确定液体晃动等效单摆理论模型,表示为下式:
[0090][0091]
其中,a、b、c、d分别表示第一至第四刚体与液体晃动耦合矩阵,m表示晃动液体质量矩阵,k表示刚度矩阵以及η表示等效单摆模态位移。以及确定混合航天器姿态动力学理论模型,表示为下式:
[0092][0093]
其中,p表示阻尼矩阵。
[0094]
基于上述步骤二中的所述理论模型可以进行数学仿真验证,实现航天器的前期论证和算法设计。
[0095]
步骤三、基于步骤二中的所述理论模型进行航天器姿态动力学模型模块化拆分。
[0096]
对于步骤二中的理论建模,根据耦合关系和实际需求可以进行解耦和模块化设计。一方面可以支持模型的快速拓展和搭建,另一方面可以支持模型的分布式运行,提高运行时效性。各个模块通过输入和输出关系建立关联,并在建模过程中尽量减少状态变量的求解和迭代运算,进一步提高模型的时效性。由于挠性附件与刚体运动之间存在强耦合关系且大部分航天器都安装有太阳帆板,所以在建模的时候将刚体和挠性统一建模,液体晃动和转动附件进行分别建模,将航天器姿态动力学模型拆分为刚挠模块、液体晃动模块和转动附件模块三大部分。如图2所示,其中刚挠模块主要基于所述挠性状态方程以及刚体转动方程进行建模,液体晃动模块主要基于所述液体晃动等效单摆理论模型进行建模,转动附件模块主要基于所述转台转动方程进行建模。
[0097]
步骤四、确定步骤三中所述地面姿态动力学模块的配置项、输入项、输出项以及辅助分析量,并且确定所述地面姿态动力学模块的各模块之间的级联关系。
[0098]
如图3a所示,所述刚挠模块的配置项可以包括:
[0099]
刚体配置项,其中包括刚体质量、刚体质心位置以及刚体转动惯量;以及
[0100]
挠性附件配置项,其中包括太阳帆板个数、挠性附件安装位置、挠性附件平动耦合系数、挠性附件转动耦合系数、刚度矩阵以及阻尼矩阵;
[0101]
所述刚挠模块的输入项可以包括控制力矩、扰动力矩以及转动附件角动量,其中所述扰动力矩包括转动附件对航天器本体作用力矩以及充液贮箱对航天器本体作用力矩;
[0102]
所述刚挠模块的输出项可以包括航天器姿态信息,所述航天器姿态信息包括姿态角、姿态角速度以及姿态四元数;以及
[0103]
所述刚挠模块的辅助分析量可以包括混合体转动惯量、太阳帆板模态位移、太阳帆板受到的力矩以及中心刚体受到的力矩。
[0104]
如图3b所示,所述转动附件模块的配置项可以包括载荷转台个数、转动附件安装位置以及转动附件质量;
[0105]
所述转动附件模块的输入项可以包括转动附件导引律以及航天器姿态信息,其中
航天器姿态信息由所述刚挠模块输出,转动附件导引律由地面或者星间通信上注;
[0106]
所述转动附件模块的输出项可以包括转动附件对航天器本体作用力矩、转动附件角动量以及转动附件微振动力;以及
[0107]
所述转动附件的辅助分析量可以包括转动附件转速。
[0108]
如图3c所示,所述液体晃动模块的配置项可以包括充液贮箱个数、晃动质量、静止质量、等效摆长、阻尼比、静止质量位置向量、悬挂点位置向量以及静止质量惯量;
[0109]
所述液体晃动模块的输入项可以包括航天器的纵向加速度、横向加速度、平动加速度以及航天器姿态信息;
[0110]
所述液体晃动模块的输出项可以包括充液贮箱对航天器本体作用力以及充液贮箱对航天器本体作用力矩;以及
[0111]
所述液体晃动模块的辅助分析量可以包括单摆模态位移、单摆模态频率以及转动惯量。
[0112]
所述地面姿态动力学模块的各模块之间的级联关系可以如图4所示,其中所述刚挠模块将航天器姿态信息输出至所述转动附件模块以及所述液体晃动模块。所述转动附件模块输出转动附件对航天器本体作用力矩、转动附件角动量以及转动附件微振动力至所述刚挠模块。以及所述液体晃动模块输出航天器本体作用力、充液贮箱对航天器本体作用力矩以及充液贮箱质量特性至所述刚挠模块,其中所述充液贮箱质量特性包括由于充液贮箱中液体晃动造成的质量以及质量惯量变化。
[0113]
通过上述步骤四中将所述地面姿态动力学模块的各模块的配置项、输入项、输出项以及辅助分析量梳理清晰的过程可以产生如下有益效果:可以明确各模块的功能正常运行的参数设置以及输入驱动;可以明确各模块的输出项作为级联模块的输入,同时也可以输出关键数据以及辅助分析量以便于数据的分析;可以再次梳理各模块之间的耦合关系,对所述理论模型的建模等前述工作进行验证,同时也为后续使用提供支撑;以及可以方便操作者的使用和针对不同场景的再次开发。
[0114]
步骤五、构建航天器地面姿态动力学模型,其中将所述地面姿态动力学模块通过建立动态链接库的方式进行封装。
[0115]
其中可以包括下列步骤:首先进行各模块的配置和封装,然后进行各模块的级联和封装,最后根据实际需求设置各个模块的开关状态。
[0116]
通过构建所述航天器地面姿态动力学模型,可以将通过数学工具建立的理论模型转化为可按照固定时间运行的实时模型,并且支持在相应的硬件系统上运行。完成封装后的所述航天器地面姿态动力学模型除了对外开放的参数和接口可以进行更改,其余接口只能通过开发者在数学模型上更改,完成验证后重新封装更新,可以有效避免误操作,从而提高系统的可靠度。另外所述地面姿态动力学模块可以根据具体需求动态设置各模块的开关状态,选择所需激活模块,使系统资源得到优化。
[0117]
基于所述航天器地面姿态动力学模型,可以进行后续航天器的半/全物理仿真以及模飞、伴飞试验。例如可以在地面半/全物理和模拟在轨飞行阶段通过航天器任务的需求选择相应的配置进行试验,其中可以将复杂的所述航天器姿态动力学模型进行降阶以提高所述航天器姿态动力学模型的快速高效性。实际在轨飞行阶段可以通过所述航天器地面姿态动力学模型对在轨状态进行评估,当发生未预期的现象时可以通过所述航天器地面姿态
动力学模型的相应配置进行问题定位、机理分析和排故方案预演。
[0118]
尽管上文描述了本发明的各实施例,但是,应该理解,它们只是作为示例来呈现的,而不作为限制。对于相关领域的技术人员显而易见的是,可以对其做出各种组合、变型和改变而不背离本发明的精神和范围。因此,此处所公开的本发明的宽度和范围不应被上述所公开的示例性实施例所限制,而应当仅根据所附权利要求书及其等同替换来定义。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。