1.本技术涉及无人清扫车技术领域,具体涉及一种应用于无人清扫车的防护装置。
背景技术:
2.无人清扫车能实现无人清扫、路径规划,但是避障传感器由于不可避免的存在监控死角,有时难免会避障失误,使车体碰到障碍物,对清扫车不利。
3.公开号为cn212447855u的中国专利(公开日期2021-02-02)公开了无人清扫车弹性防护机构,在车体外壳外侧的一端固定安装有防撞条本体,减少了车身碰撞时的损害。
4.但是由于防撞条本体的设置,导致了无人清扫车车体的横向体积变大,进一步的占据了使用空间,影响无人清扫车的通过性,尤其是狭窄区域。
5.需要说明的是,本背景技术部分中公开的以上信息仅用于理解本发明构思的背景技术,并且因此可以包含不构成现有技术的信息。
技术实现要素:
6.针对现有技术的不足,本技术公开一种应用于无人清扫车的防护装置,能够解决防撞条本体导致了无人清扫车车体的横向体积变大的问题。
7.为实现以上目的,本技术通过以下技术方案予以实现:
8.一种应用于无人清扫车的防护装置,包括防撞条本体,防撞条本体连接有弹性杆的一端,弹性杆的另一端连接有安装板,安装板包括安全结构,安装板连接有伸缩气缸的一端,伸缩气缸的另一端连接无人清扫车的壳体,在无人清扫车的壳体的侧面形成有用于容纳防撞条本体的容纳槽。
9.优选的技术方案,弹性杆包括连杆,防撞条本体的内侧固定连接连杆的一端,连杆的另一端滑动连接在安装板形成的通孔。本技术借助连杆的支撑作用,实现防撞条本体和安装板的稳定连接的目的。
10.进一步优选的技术方案,弹性杆包括弹簧,防撞条本体的内侧固定连接弹簧的一端,弹簧的另一端固定连接安装板的侧面。本技术借助弹簧的缓冲作用,实现防撞条本体的缓冲吸能的目的。
11.优选的技术方案,安全结构的一侧固定连接安装板的一部分,安装结构的另一侧固定连接安装板的另一部分。本技术借助安全结构的保护作用,实现保护伸缩气缸的目的。
12.进一步优选的技术方案,安全结构包括滑杆和滑块,滑杆滑动连接在滑块形成的通孔,滑杆固定连接安装板的一部分,滑块固定连接安装板的另一部分。本技术借助滑杆的导向作用,实现定向卸力的目的。
13.优选的技术方案,伸缩气缸的活塞杆固定连接安装板,伸缩气缸的缸体固定连接无人清扫车的壳体的内部。本技术借助伸缩气缸的伸缩作用,实现伸缩防撞条本体的目的。
14.本技术公开一种应用于无人清扫车的防护装置,具有以下优点:
15.本技术借助在无人清扫车的壳体的侧面形成的容纳槽,可以实现对防撞条本体的
灵活容纳,从而解决无人清扫车车体的横向体积变大的问题,进而降低了防撞条本体占据的使用空间,避免影响无人清扫车的通过性。
附图说明
16.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
17.显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
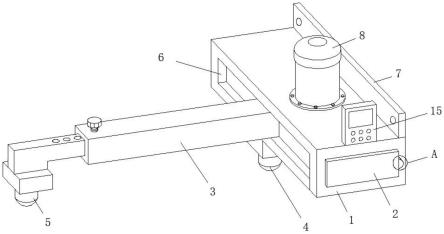
18.图1是本技术实施例在主视方向的示意图(防撞条本体伸出);
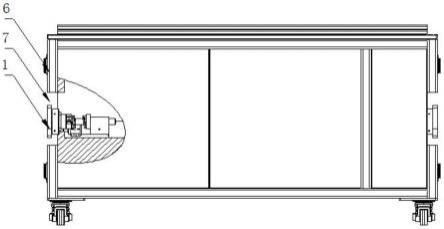
19.图2是本技术实施例在主视方向的示意图(防撞条本体收缩);
20.图3是本技术实施例在俯视方向的局部示意图。
具体实施方式
21.为使本技术实施例的目的、技术方案和优点更加清楚,下面将对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。
22.基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
23.实施例1
24.如图1至图3所示,本技术实施例所述一种应用于无人清扫车的防护装置,包括防撞条本体1,防撞条本体1连接有弹性杆的一端,弹性杆的另一端连接有安装板3,安装板3包括安全结构,安装板3连接有伸缩气缸5的一端,伸缩气缸5的另一端连接无人清扫车的壳体6,在无人清扫车的壳体6的侧面形成有用于容纳防撞条本体1的容纳槽7。
25.本实施例借助在无人清扫车的壳体6的侧面形成的容纳槽7,可以实现对防撞条本体1的灵活容纳,从而解决无人清扫车车体的横向体积变大的问题,进而降低了防撞条本体1占据的使用空间,避免影响无人清扫车的通过性。
26.为了解决如何实现防撞条本体1和安装板3的稳定连接的问题,弹性杆包括连杆21,防撞条本体1的内侧可以通过包括但不限于焊接连接的方式固定连接连杆21的一端,连杆21的另一端滑动连接在安装板3通过包括但不限于车削加工的方式形成的通孔。
27.为了解决如何实现防撞条本体1的缓冲吸能的问题,弹性杆包括弹簧22,防撞条本体1的内侧可以通过包括但不限于焊接连接的方式固定连接弹簧22的一端,弹簧22的另一端可以通过包括但不限于焊接连接的方式固定连接安装板 3的侧面。
28.本实施例借助连杆21的支撑作用,实现防撞条本体1和安装板3的稳定连接的目的。同时借助弹簧22的缓冲作用,实现防撞条本体1的缓冲吸能的目的。在防撞条本体1受到外力的冲击,或者无人清扫车触碰到障碍物的情况下,防撞条本体1会沿连杆21的延伸方向收缩。
29.为了解决如何实现保护伸缩气缸5的问题,安全结构的一侧固定连接安装板3的一部分,安装结构的另一侧固定连接安装板3的另一部分。
30.为了解决如何实现定向卸力的问题,安全结构包括滑杆41和滑块42,滑杆 41滑动
连接在滑块42通过包括但不限于车削加工的方式形成的通孔,滑杆41 可以通过包括但不限于焊接连接的方式固定连接安装板3的一部分,滑块42固定连接安装板3的另一部分。
31.本实施例借助安全结构的保护作用,实现保护伸缩气缸5的目的。同时借助滑杆41的导向作用,实现定向卸力的目的。在防撞条本体1受到外力的冲击,或者无人清扫车触碰到障碍物的情况下,如果冲击力大于滑杆41和滑块42之间形成的锁紧力,那么滑杆41和滑块42脱离。
32.值得注意的是,在滑块42上开有螺纹孔,在螺纹孔旋紧螺栓8,螺栓8顶紧在滑杆41的周侧面形成摩擦力,形成的摩擦力就是滑杆41和滑块42之间的锁紧力。
33.为了解决如何实现伸缩防撞条本体1的问题,伸缩气缸5的活塞杆包括但不限于焊接连接的方式固定连接安装板3,伸缩气缸5的缸体包括但不限于螺钉连接的方式固定连接无人清扫车的壳体6的内部。
34.本实施例借助伸缩气缸5的伸缩作用,实现伸缩防撞条本体1的目的。伸缩气缸5收缩控制防撞条本体1回到容纳槽7内,伸缩气缸5伸出控制防撞条本体1伸出容纳槽7外。
35.容易理解的,对于伸缩气缸5的控制既可以是采用控制器的自动控制,也可以是人工干预下的手动控制,具体的控制方式是本领域技术人员可以根据具体情况进行调整和实时的,在本实施例中不再赘述。
36.需要说明的是,在本文中关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
37.而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
38.在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
39.以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。