1.本发明涉及执行避免车道偏离控制的驾驶辅助装置,避免车道偏离控制是为了避免车辆从车辆所行驶的行驶车道偏离而对车辆的转向角进行变更的控制。
背景技术:
2.以往以来,已知执行避免车道偏离控制的驾驶辅助装置。例如,日本特开2010-100120所记载的驾驶辅助装置(以下称为“现有装置”。)执行根据驾驶员的转向操作的输入转矩来对转向机构提供转向转矩的避免车道偏离控制。由此,能够在驾驶员有意图地使车辆以偏离车道的方式进行了行驶的情况下减小转向转矩,能够在驾驶员非意图地使车辆以偏离车道的方式进行了行驶的情况下增大转向转矩。
技术实现要素:
3.在执行避免车道偏离控制的期间中,为了对车辆的转向角进行变更,对“与车辆的方向盘连结的转向轴”提供转向转矩。因此,在执行避免车道偏离控制的期间中,方向盘也会旋转。
4.由于该方向盘的旋转,根据驾驶员的方向盘的保持位置而有可能产生驾驶员对于方向盘的非意图的操作。
5.例如,由于保持方向盘的驾驶员的手的自重,有可能产生方向盘的额外转动。进而,有可能驾驶员对基于避免车道偏离控制的方向盘的旋转感到惊讶而对方向盘进行非意图的操作。
6.本发明是为了应对前述的问题而完成的。即。本发明的目的之一在于提供一种驾驶辅助装置,其能够降低因基于避免车道偏离控制的方向盘的旋转而产生驾驶员对于方向盘的非意图的操作的可能性。
7.本发明的驾驶辅助装置(以下也称为“本发明装置”。)具备:
8.驱动装置(34),其构成为通过对与车辆(va)所具备的方向盘(sw)连结的转向轴(us)提供转矩来对作为所述车辆的转向轮的角度的转向角进行变更;和
9.控制单元(20、30),其构成为在预定的开始条件成立的情况下,执行避免车道偏离控制,所述避免车道偏离控制是对所述驱动装置进行控制以使得为了避免所述车辆从所述车辆正在行驶的行驶车道偏离而变更所述转向角的控制。
10.所述控制单元构成为:在所述开始条件的成立时间点,在保持位置不满足预定的特定条件的情况下(步骤710:“否”),以使得转向角速度的大小比在所述成立时间点所述保持位置满足所述特定条件的情况下的该转向角速度的大小小的方式执行所述避免车道偏离控制(mapgytgt(t)、步骤660、步骤665、步骤1105、步骤1205~步骤1225),所述保持位置表示所述车辆的驾驶员的保持所述方向盘的手的位置,所述转向角速度是所述转向角的每单位时间的变化量。
11.由此,在保持位置不满足特定条件的情况下,与保持位置满足特定条件的情况相
比,基于避免车道偏离控制的方向盘的转速的大小变小。由此,能够降低因基于避免车道偏离控制的方向盘的旋转而产生驾驶员的方向盘的额外转动和非意图的操作的可能性。
12.在本发明装置的一个技术方案中,所述控制单元构成为:在所述保持位置不满足所述特定条件的情况下,与所述保持位置满足所述特定条件的情况相比,提早所述开始条件的成立定时,由此,增长所述避免车道偏离控制的执行时间(步骤665和步骤670)。
13.根据本技术方案,在保持位置不满足特定条件的情况下,通过以比保持位置满足特定条件的情况下早的定时开始避免车道偏离控制,避免车道偏离控制的执行时间变长。因此,即使使保持位置不满足特定条件的情况下的转向角速度的大小比保持位置满足特定条件的情况下小,也能够执行避免车道偏离控制。
14.在本发明装置的一个技术方案中,所述控制单元构成为:在从所述车辆的预定的基准点(p)到在所述行驶车道的宽度方向上设定的避免位置(pp)为止的所述行驶车道的宽度方向上的宽度方向距离(ds)与必要距离(dsn)相一致的情况下(步骤650:“是”),判定为所述开始条件已成立,所述必要距离是为了使横向车速在经过了预定的控制时间(tc)时成为零所需要的距离,所述横向车速是所述车辆的车宽方向上的车速。
15.根据本技术方案,能够防止基准点在执行避免车道偏离控制的期间中超出避免位置。
16.在上述技术方案中,所述控制单元构成为:在所述保持位置不满足所述特定条件的情况下(步骤645:“否”),在所述宽度方向距离与所述必要距离一致之前判定为所述开始条件已成立(步骤665:“是”)。
17.根据本技术方案,在保持位置不满足特定条件的情况下,通过以比保持位置满足特定条件的情况下早的定时开始避免车道偏离控制,避免车道偏离控制的执行时间变长。因此,即使使保持位置不满足特定条件的情况下的转向角速度的大小比保持位置满足特定条件的情况下小,也能够降低基准点在执行避免车道偏离控制的期间中超出避免位置的可能性,进一步,能够提高横向车速在基准点到达避免位置时成为零的可能性。
18.在上述技术方案中,所述控制单元构成为:在所述保持位置不满足所述特定条件的情况下(图6所示的步骤645:“否”),将所述避免位置设定为向与朝向所述宽度方向上的所述行驶车道的中央的方向相反的方向离开了预定距离的位置(步骤1105),使所述控制时间比所述保持位置满足所述特定条件的情况下的该控制时间长。
19.根据本技术方案,在保持位置不满足特定条件的情况下,通过避免位置被设定为比保持位置满足特定条件的情况下远离了的位置,避免车道偏离控制的执行时间变长。因此,即使使保持位置不满足特定条件的情况下的转向角速度的大小比保持位置满足特定条件的情况下小,也能够降低基准点在执行避免车道偏离控制的期间中超出“被设定为远离了的位置的避免位置”的可能性。进一步,能够提高横向车速在基准点到达该避免位置时成为零的可能性。
20.在本发明装置的一个技术方案中,所述控制单元构成为:在所述成立时间点所述保持位置不满足所述特定条件的情况下,在从所述成立时间点起到经过预定时间(td)为止的初始期间中,使所述转向角速度的大小比假定为在所述成立时间点所述保持位置满足所述特定条件时的所述转向角速度的大小小,在从所述成立时间点经过了所述初始期间的时间点以后,将所述转向角速度的大小增大与在所述初始期间中减小了所述转向角速度的大
小相应的量(图13所示的横向加速度映射mapgytgt(t))。
21.避免车道偏离控制刚开始后的期间为产生方向盘的额外转动和非意图的操作的可能性最高的期间。根据本技术方案,在保持位置不满足特定条件的情况下,与保持位置满足特定条件的情况相比,在初始期间中,基于避免车道偏离控制的方向盘的转速的大小变小。由此,能够在初始期间中降低产生方向盘的额外转动和非意图的操作的可能性。
22.在本发明装置的一个技术方案中,
23.所述控制单元构成为:
24.在所述避免车道偏离控制中,对所述驱动装置进行控制以使得所述转向角速度的大小不变为比预定的保护值大,
25.在所述成立时间点所述保持位置不满足所述特定条件的情况下(步骤1205:“否”),使用比在所述成立时间点所述保持位置满足所述特定条件的情况下(步骤1210)小的保护值来执行所述避免车道偏离控制(步骤1220、步骤1225)。
26.在保持位置不满足特定条件的情况下,使用比保持位置满足特定条件的情况下小的保护值,因此,方向盘的转速的大小变小。由此,能够在保持位置不满足特定条件的情况下降低产生方向盘的额外转动和非意图的操作的可能性。
27.在本发明装置的一个技术方案中,所述控制单元构成为:在所述驾驶员用双手保持所述方向盘、且所述驾驶员保持所述方向盘的双手的位置相对于将所述方向盘处于中立位置时的正上的点和正下的点相连接的假想的基准线(bl)为线对称的情况下,判定为所述保持位置满足了所述特定条件(步骤710:“是”)。
28.与保持位置相对于基准线为线对称的情况相比,在驾驶员用单手保持方向盘的情况下以及驾驶员虽然用双手保持方向盘、但保持位置相对于基准线不为线对称的情况下,产生方向盘的额外转动和非意图的操作的可能性高。在本技术方案中,在这样的情况下判定为保持位置不满足特定条件,因此,能够在驾驶员正在以产生额外转动和非意图的操作的可能性高的方式保持方向盘的情况下,执行使得转向角速度的大小变小的避免车道偏离控制。
29.此外,在上述说明中,为了有助于发明的理解,对与后述的实施方式对应的发明的构成用括号添加了在该实施方式所使用的名称以及/或者标号。然而,发明的各构成要素并不限定于由所述名称以及/或者标号规定的实施方式。
附图说明
30.下文将参照附图说明本发明示例性实施例的特征、优点以及技术和产业的意义,其中相同的标号表示同样的要素,并且,其中:
31.图1是本发明的实施方式涉及的驾驶辅助装置的概略系统构成图。
32.图2是避免车道偏离控制的说明图。
33.图3是被保持为满足特定条件的方向盘的正视图。
34.图4a是表示由单手保持的方向盘的正视图。
35.图4b是通过避免车道偏离控制开始了旋转时的方向盘的正视图。
36.图4c是发生了额外转动时的方向盘的正视图。
37.图5是特定条件未成立的情况下的避免车道偏离控制的工作例的说明图。
38.图6是表示图1所示的驾驶辅助ecu的cpu执行的开始判定例程的流程图。
39.图7是表示图1所示的驾驶辅助ecu的cpu执行的特定条件判定子例程的流程图。
40.图8是表示图1所示的驾驶辅助ecu的cpu执行的避免车道偏离控制例程的流程图。
41.图9是表示图1所示的驾驶辅助ecu的cpu执行的结束判定例程的流程图。
42.图10是本发明的实施方式的第1变形例涉及的避免车道偏离控制的工作例的说明图。
43.图11是表示本发明的实施方式的第1变形例的开始判定例程的流程图。
44.图12是表示本发明的实施方式的第2变形例的避免车道偏离控制例程的流程图。
45.图13是本发明的实施方式的第3变形例涉及的避免车道偏离控制的工作例的说明图。
具体实施方式
46.<构成>
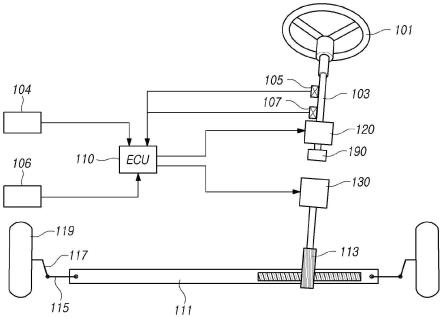
47.如图1所示,本发明的实施方式涉及的驾驶辅助装置(以下被称为“本辅助装置”。)10搭载于车辆va。
48.本辅助装置10具备驾驶辅助ecu20和电动动力转向ecu30。驾驶辅助ecu20称为“dsecu20”,电动动力转向ecu30称为“epsecu30”。
49.这些ecu是具备微型计算机来作为主要部分的电控制装置(electric control unit,电子控制单元),经由未图示的can(controller area network,控制器局域网络)以相互能够发送以及能够接收信息的方式相连接。微型计算机包括cpu、rom、ram以及接口(i/f)等。cpu通过执行保存于rom的指令(程序、例程)来实现各种功能。这些ecu的几个或者全部也可以合并为一个ecu。此外,有时也将这些ecu称为“控制单元”或者“控制器”。
50.本辅助装置10具备摄像头传感器21、加速度传感器23、转向角传感器24、转向转矩传感器25以及触摸传感器26。这些搭载于车辆va。dsecu20与这些传感器连接,接收来自这些传感器的检测信号。此外,这些传感器也可以连接于dsecu20以外的ecu。在该情况下,dsecu20经由can从连接了传感器的ecu接收该传感器的检测信号。
51.摄像头传感器21通过拍摄车辆va前方的区域的风景来取得图像数据,向dsecu20发送图像数据。dsecu20基于图像数据来识别边界线。边界线是成为“车辆va当前行驶的车道(以下称为“行驶车道”。)”与“该行驶车道以外的区域”的交界的线。作为边界线的一个例子,具有道路的左白线ll(参照图2和图3。)和右白线lr(参照图2和图3。)。
52.加速度传感器23检测车辆va的前后方向上的加速度(以下称为“前后加速度”。)gx和车辆va的车宽方向上的加速度(以下称为“横向加速度”。)gy,产生表示前后加速度gx和横向加速度gy的检测信号。
53.转向角传感器24检测转向角θ,产生表示转向角θ的检测信号,该转向角θ是车辆va的方向盘sw相对于中立位置的旋转角度。
54.转向转矩传感器25设置于与方向盘sw连结的转向轴us。转向转矩传感器25检测被提供给转向轴us的转向转矩,产生表示转向转矩的检测信号。
55.触摸传感器26检测驾驶员与方向盘sw接触的手的位置,产生表示其位置的检测信号。
56.epsecu30是周知的电动动力转向系统的控制装置。epsecu30连接于马达驱动器32。
57.马达驱动器32连接于转向用马达34。有时将转向用马达34称为“驱动装置”。转向用马达34被组装到“包括方向盘sw、转向轴us以及未图示的转向用齿轮机构等的转向机构”。
58.转向用马达34是电动马达(电动致动器),通过被从马达驱动器32供给的电力来向转向轴us提供转矩(力)。该转矩被作为转向辅助转矩(转向辅助力)来使用。通过该转矩,能够对车辆va的左右的转向轮进行转向。即,转向用马达34能够对车辆va的转向角(也被称为“转转向角”。)进行变更。
59.epsecu30在未在执行后述的避免车道偏离控制的情况下,取得转向转矩传感器15检测的转向转矩tra来作为驾驶员输入到方向盘sw的转向转矩(以下也被称为“驾驶员转矩tqdr”。)。epsecu30通过使转向用马达34对转向轴us提供该驾驶员转矩tqdr,对驾驶员的方向盘sw的操作进行辅助。
60.进一步,epsecu30在正在执行后述的避免车道偏离控制的情况下,从dsecu20接收包括在避免车道偏离控制中所取得的目标横向加速度gytgt的转向指令。epsecu30通过从当前时间点的横向加速度gy减去目标横向加速度gytgt来取得差分横向加速度δgy,通过对转向轴us提供与差分横向加速度δgt相应的转矩来对转向角进行变更。通过epsecu30,差分横向加速度δgy的绝对值(|δgy|)越大,则上述转矩越大,方向盘sw的转速的大小(即每单位时间的转向角的变化量)越大。
61.后述的横向加速度映射mapgytgt(t)的目标横向加速度gytgt的倾斜度的大小越大,该差分横向加速度δgy的绝对值(|δgy|)越大。
62.显示器40显示执行避免车道偏离控制的期间中的警告消息和避免车道偏离控制的工作状况。显示器40既可以抬头显示器,也可以是多功能显示器。扬声器50在执行避免车道偏离控制的期间中发出蜂鸣音。
63.<避免车道偏离控制>
64.参照图2对避免车道偏离控制进行说明。
65.dsecu20每当经过预定时间时,从摄像头传感器21取得图像数据,识别车辆va当前行驶的行驶车道的边界线(例如左白线ll和右白线lr)。dsecu20通过使距车辆va最近的边界线(以下称为“对象边界线”。)假想地移动预定距离dd来取得避免位置(避免线)pp。执行避免车道偏离控制以使得车辆va的基准点p不会相比于避免位置pp而超出到外侧。基准点p为车辆va的左右前轮的车轴上的左右前轮间的中心位置。
66.dsecu20取得避免位置pp与当前的基准点p之间的距离(以下称为“侧距离ds”。)。有时也将侧距离ds称为“宽度方向距离”。dsecu20通过对当前时间点的横向加速度gy进行时间积分,取得作为车宽方向上的车速vs的当前时间点的横向车速vsy。
67.dsecu20基于当前时间点的横向车速vsy,取得为了在从当前时间点起经过了预定的控制时间tc时横向车速vsy成为零所需要的横向加速度gy(以下称为“必要横向加速度gyn”。)。并且,dsecu20在车辆va在前后方向上维持“作为当前时间点的前后方向上的车速vs的前后车速vsx”不变地进行移动、且在车宽方向上以必要横向加速度gyn进行了移动这一假定下,取得车辆va在从当前时间点起到经过控制时间tc为止的期间中在行驶车道的宽
度方向上移动的距离来作为必要侧距离dsn。换言之,必要侧距离dsn也可以表现为为了在从当前时间点起经过了预定的控制时间tc时横向车速vsy成为零所需要的侧距离ds。
68.dsecu20在当前时间点的侧距离ds为必要侧距离dsn以下时,判定为预定的开始条件已成立,开始避免车道偏离控制。在图2所示的例子中,在时间点t0,侧距离ds比必要侧距离dsn大,因此,开始条件未成立。在时间点t1,侧距离ds成为必要侧距离dsn以下而开始条件成立,开始避免车道偏离控制。
69.在避免车道偏离控制中,dsecu20每当经过预定时间时,向epsecu30发送包括目标横向加速度gytgt的转向指令。
70.dsecu20在开始避免车道偏离控制的情况下,生成对从该开始时间点起的经过时间与目标横向加速度gytgt的关系进行了规定的横向加速度映射mapgytgt(t)(参照图2的下方所示的曲线图。)。dsecu20通过参照横向加速度映射mapgytgt(t),取得与经过时间相应的目标横向加速度gytgt。此外,目标横向加速度gytgt和横向加速度gy将车辆va的右方向上的加速度作为正值,将左方向上的加速度作为负值。在图2所示的例子中,使开始时间点(时间点t1)的车辆va的右方向上的车速vsy为零,因此,目标横向加速度gytgt成为左方向上的加速度、即负值。
71.在图2所示的横向加速度mapgytgt(t)中,在时间点t1~时间点t2的期间中目标横向加速度gytgt减少,以使得目标横向加速度gytgt在时间点t2成为预定的横向加速度ga(ga<0),该时间点t2是经过时间成为了控制时间tc的一半(tc/2)的时间点。进一步,在图2所示的横向加速度mapgytgt(t)中,在时间点t2~时间点t3的期间中,横向加速度gy被维持为预定的横向加速度ga。
72.dsecu20以使得在时间点t1~时间点t3的期间对目标横向加速度gytgt进行积分而得到的值(积分值)(即,在图2所示的曲线图中进行了填充的部分的面积)和“对控制时间tc乘以必要横向加速度gyn而得到的值”一致的方式求出上述横向加速度ga。
73.在时间点t3,车辆va到达避免位置pp,并且,横向车速vsy成为零。在时间点t3以后的避免车道偏离控制中,dsecu20发送包括用于车辆va向行驶车道的宽度方向的中央侧行驶的目标横向加速度gytgt的转向指令。并且,dsecu20在时间点t3以后,在作为预定的结束位置与基准点p之间的距离的结束侧距离des成为了阈值距离dth以下时,结束避免车道偏离控制。结束位置通过使靠近车辆va一方的边界线(对象边界线)向行驶车道的中央假想地移动预定的结束距离de来获得。
74.(工作的概要)
75.dsecu20以在保持位置不满足预定的特定条件的情况下使目标横向加速度gytgt的每单位时间的变化量比保持位置满足特定条件的情况下的该变化量小的方式执行避免车道偏离控制,所述保持位置是驾驶员的保持了方向盘sw的手的位置。由此,转向角的每单位时间的变化量(即方向盘sw的转速的大小)变小,能够降低避免车道偏离控制中产生驾驶员的方向盘sw的额外转动和非意图的操作的可能性。
76.参照图3对上述特定条件进行说明。
77.在驾驶员的保持方向盘sw的双手的位置相对于方向盘sw的基准线bl为线对称时,dsecu20判定为保持位置满足特定条件(即判定为特定条件已成立。)。此外,基准线bl是将方向盘sw处于中立位置时的正上的点pu和正下的点pb相连接的假想的线。
78.在图3所示的例子中,驾驶员以所谓的“9时15分”的位置保持方向盘sw,保持位置相对于基准线bl为线对称,满足特定条件。
79.如图4a所示,在驾驶员用单手保持方向盘sw的上部的情况下,上述特定条件不成立。当在这样的状况下执行避免车道偏离控制时,如图4b所示,方向盘sw进行旋转。此时,由于因方向盘sw的旋转而产生于“保持方向盘sw的手”的离心力,有可能产生方向盘sw的额外转动。
80.在本实施方式中,在特定条件未成立的情况下,与特定条件成立的情况相比,减小转向角的变化量,因此,方向盘sw的转速的大小变小。由此,能够减小上述离心力,能够降低产生方向盘sw的额外转动的可能性。进一步,根据本实施方式,能够降低驾驶员对方向盘sw的旋转感到惊讶的可能性,因此,能够降低驾驶员对方向盘进行非意图的操作的可能性。
81.(工作例)
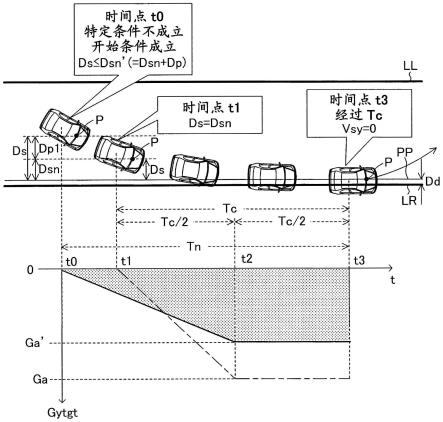
82.在图2中对通常的(即上述特定条件成立的情况下的)避免车道偏离控制进行了说明。参照图5对上述特定条件未成立的情况下的避免车道偏离控制进行说明。
83.在特定条件未成立的情况下,dsecu20在侧距离ds为“通过对必要侧距离dsn加上预定距离dp1来得到的距离dsn
’”
以下时,判定为开始条件已成立,开始避免车道偏离控制。在图5所示的例子中假定为:在时间点t0,特定条件未成立,并且,侧距离ds成为距离dsn’以下。根据该假定,在时间点t0,开始条件成立,避免车道偏离控制开始。
84.在该时间点t0,dsecu20生成横向加速度映射mapgytgt(t)。
85.对于时间点t0的车宽方向上的车速vsy(vsy0)在从时间点t0经过了必要时间tn时成为零为止所需要的必要加速度gyn’,可以使用上述必要时间tn来表示(参照式1。)。
86.gyn’=-vsy0/tn
···
式1
87.dsecu20在车辆va在前后方向上维持时间点t0的前后方向上的车速vsx0不变地进行移动、且在车宽方向上以必要加速度gyn’进行了移动这一假定下,求出为了“车辆va在行驶车道的宽度方向上移动的距离”与距离dsn’一致而需要的时间(必要时间tn)。
88.该必要时间tn比上述控制时间tc长。
89.并且,dsecu20以使得在“从开始时间点起到经过必要时间tn为止的期间”对与经过时间对应的目标横向加速度gytgt进行积分而得到的积分值(在图5所示的曲线图中涂黑了的部分的面积)与“必要横向加速度gyn和控制时间tc之积”一致的方式求出横向加速度ga’。dsecu20基于该横向加速度ga’,生成横向加速度映射mapgytgt(t)(参照图5的曲线图。)。
90.如根据图5的曲线图中也可理解的那样,特定条件未成立的情况下的避免车道偏离控制的执行时间(tn)比特定条件成立的情况下的避免车道偏离控制的执行时间(tc)长。特定条件未成立的情况下的避免车道偏离控制中的时间点t0~时间点t2的目标横向加速度gytgt的倾斜度gr的大小比特定条件成立的情况下的避免车道偏离控制中的时间点t1~时间点t2的倾斜度gr的大小小。因此,能够使特定条件未成立的情况下的基于避免车道偏离控制的方向盘sw的转速的大小(即作为每单位时间的转向轮的转向角的变化量的、转向角速度的大小)比特定条件成立的情况下的方向盘sw的转速的大小(转向角速度的大小)小。
91.(具体的工作)
92.<开始判定例程>
93.dsecu20的cpu(以下,在记载为了“cpu”的情况下,除非另有说明,否则就是指dsecu20的cpu。)每当经过预定时间时,执行在图6中由流程图表示的开始判定例程。
94.因此,当成为预定定时时,cpu从图6所示的步骤600开始处理,进入步骤605。在步骤605中,cpu判定执行标志xexe的值是否为“0”。
95.执行标志xexe的值在避免车道偏离控制开始时被设定为“1”,在避免车道偏离控制结束时被设定为“0”。此外,执行标志xexe的值在初始例程中也被设定为“0”。初始例程是在车辆va的未图示的点火开关从断开(off)位置变更为接通(on)位置时由cpu执行的例程。
96.在执行标志xexe的值为“0”的情况下,cpu在步骤605中判定为“是”,依次执行步骤615~步骤645。
97.步骤615:cpu从摄像头传感器21取得图像数据,基于图像数据来识别边界线。
98.步骤620:cpu取得基准点p与避免位置pp之间的侧距离ds。
99.步骤625:cpu基于来自加速度传感器23的检测信号,确定车辆va的前后加速度gx,对该前后加速度gx进行时间积分,由此,取得作为车辆va的前后方向上的车速的前后车速vsx。进一步,cpu基于来自加速度传感器23的检测信号,确定车辆va的横向加速度gy,对该横向加速度gy进行时间积分,由此,取得横向车速vsy。
100.步骤630:cpu基于横向车速vsy和控制时间tc来取得必要横向加速度gyn。
101.步骤635:cpu在车辆va在前后方向上维持前后车速vsx不变地进行移动、且在车宽方向上以必要横向加速度gyn进行了移动这一假定下,取得必要侧距离dsn,该必要侧距离dsn是车辆va在从当前时间点起到经过控制时间tc为止的期间在行驶车道的宽度方向上移动的距离。
102.步骤640:cpu执行特定条件判定子例程。实际上,cpu当进入步骤640时,执行在图7中由流程图表示的子例程。在该子例程中,cpu若保持位置满足特定条件,则将特定标志xsp的值设定为“0”,若保持位置不满足特定条件,则将特定标志xsp的值设定为“1”。此外,特定标志xsp的值在初始例程中被设定为“1”。
103.步骤645:cpu判定特定标志xsp的值是否为“0”。
104.在特定标志xsp的值为“0”的情况下,cpu在步骤645中判定为“是”,进入步骤650。
105.在步骤650中,cpu判定侧距离ds是否为必要侧距离dsn以下。
106.在侧距离ds比必要侧距离dsn大的情况下,cpu在步骤650中判定为“否”,进入步骤695,暂且结束本例程。
107.另一方面,在侧距离ds为必要侧距离dsn以下的情况下,cpu在步骤650中判定为“是”,依次执行步骤655和步骤660。
108.步骤655:cpu将执行标志xexe的值设定为“1”,将执行计时器texe的值设定为“0”。执行计时器texe是用于对从避免车道偏离控制的开始时间点起的经过时间进行计数的计时器。
109.步骤660:cpu生成横向加速度映射mapgytgt(t)。
110.然后,cpu进入步骤695,暂且结束本例程。
111.另一方面,在cpu进入到了步骤645时、特定标志xsp的值为“1”的情况下,cpu在步骤645中判定为“否”,进入步骤665。
112.在步骤665中,cpu判定侧距离ds是否为距离dsn’以下。
113.在侧距离ds比距离dsn’大的情况下,cpu在步骤665中判定为“否”,进入步骤695,暂且结束本例程。
114.另一方面,在侧距离ds为距离dsn’以下的情况下,cpu在步骤665中判定为“是”,进入步骤670。在步骤670中,cpu取得上述必要加速度gyn’和上述必要时间tn。然后,cpu进入步骤655,生成横向加速度映射mapgytgt(t),进入步骤695,暂且结束本例程。
115.在cpu进入到了步骤605时、执行标志xexe的值为“1”的情况下,cpu在步骤605中判定为“否”,进入步骤695,暂且结束本例程。
116.<特定条件判定子例程>
117.cpu当进入图6所示的步骤640时,从图7所示的步骤700开始处理,依次执行步骤705和步骤710。
118.步骤705:cpu基于来自触摸传感器26的检测信号,确定保持方向盘sw的驾驶员的手的位置(保持位置)。
119.步骤710:cpu判定保持位置是否满足特定条件。
120.在保持位置满足特定条件的情况下,cpu在步骤710中判定为“是”,进入步骤715。在步骤715中,cpu将特定标志xsp的值设定为“0”。然后,cpu进入步骤795,暂且结束本例程,进入图6所示的步骤645。
121.另一方面,在保持位置不满足特定条件的情况下,cpu在步骤710中判定为“否”,进入步骤720。在步骤720中,cpu将特定标志xsp的值设定为“1”。然后,cpu进入步骤795,暂且结束本例程,进入图6所示的步骤645。
122.<避免车道偏离控制例程>
123.cpu每当经过预定时间时,执行在图8中由流程图表示的避免车道偏离控制例程。
124.因此,当成为预定定时时,cpu从图8所示的步骤800开始处理,进入步骤805。在步骤805中,cpu判定执行标志xexe的值是否为“1”。
125.在执行标志xexe的值为“0”的情况下,cpu在步骤805中判定为“否”,进入步骤895,暂且结束本例程。
126.另一方面,在执行标志xexe的值为“1”的情况下,cpu在步骤805中判定为“是”,依次执行步骤810和步骤815。
127.步骤810:cpu对执行计时器texe加上“1”。
128.步骤815:cpu判定特定标志xsp的值是否为“0”。
129.在特定标志xsp的值为“0”的情况下,cpu在步骤815中判定为“是”,进入步骤820。在步骤820中,cpu判定执行计时器texe的值是否为第1时间阈值t1th以下。
130.第1时间阈值t1th被设定为使得在执行计时器texe成为了第1时间阈值t1th时、从避免车道偏离控制的开始时间点起的经过时间成为控制时间tc的值。
131.在执行计时器texe的值为第1时间阈值t1th以下的情况下,cpu在步骤820中判定为“是”,依次执行步骤825和步骤830。
132.步骤825:cpu通过将执行计时器texe的值应用于横向加速度映射mapgytgt(t),取得目标横向加速度gytgt。
133.步骤830:cpu判定差分横向加速度δgy的绝对值(|δgy|)是否为预定的保护值
grd以下。差分横向加速度δgy通过从当前时间点的横向加速度gy减去目标横向加速度gytgt来取得。
134.在上述绝对值(|δgy|)为保护值grd以下的情况下,cpu在步骤830中判定为“是”,进入步骤835。在步骤835中,cpu向epsecu30发送包括目标横向加速度gytgt的转向指令。然后,cpu进入步骤895,暂且结束本例程。
135.另一方面,在上述绝对值(|δgy|)比保护值grd大的情况下,cpu在步骤830中判定为“否”,进入步骤840。在步骤840中,cpu设定目标横向加速度gytgt以使得上述绝对值(|δgy|)成为保护值grd以下。
136.在差分横向加速度δgy为正值的情况下,cpu将从横向加速度gy减去保护值grd而得到的值设定为目标横向加速度gytgt。
137.在差分横向加速度δgy为负值的情况下,cpu把将横向加速度gy和保护值grd相加而得到的值设定为目标横向加速度gytgt。
138.然后,cpu在步骤835中向epsecu30发送转向指令,进入步骤895,暂且结束本例程。
139.在cpu进入到了步骤820时、执行计时器texe的值比第1时间阈值t1th大的情况下,cpu在步骤820中判定为“否”,依次执行步骤845和步骤850。
140.步骤845:cpu基于来自摄像头传感器21的图像数据来识别边界线。
141.步骤850:cpu基于边界线来确定行驶车道,取得用于使车辆va向行驶车道的宽度方向上的中央行驶的目标横向加速度gytgt。
142.然后,cpu进入步骤830。
143.在cpu进入到了步骤815时、特定标志xsp的值为“1”的情况下,cpu在步骤815中判定为“否”,进入步骤855。在步骤855中,cpu判定执行计时器texe的值是否为第2时间阈值t2th以下。
144.第2时间阈值t2th被设定为使得在执行计时器texe成为了第2时间阈值t2th时、从避免车道偏离控制的开始时间点起的经过时间成为必要时间tn的值。
145.在执行计时器texe的值为第2时间阈值t2th以下的情况下,cpu在步骤855中判定为“是”,进入步骤825,取得与执行计时器texe的值对应的目标横向加速度gytgt。然后,cpu进入步骤830。
146.另一方面,在执行计时器texe的值比第2时间阈值t2th大的情况下,cpu在步骤855中判定为“否”,进入步骤845。
147.<结束判定例程>
148.cpu每当经过预定时间时,执行在图9中由流程图表示的结束判定例程。
149.因此,当成为预定定时时,cpu从图9所示的步骤900开始处理,进入步骤905。在步骤905中,cpu判定执行标志xexe的值是否为“1”。
150.在执行标志xexe的值为“0”的情况下,cpu在步骤905中判定为“否”,进入步骤995,暂且结束本例程。
151.另一方面,在执行标志xexe的值为“1”的情况下,cpu在步骤905中判定为“是”,进入步骤910。在步骤910中,cpu判定特定标志xsp的值是否为“0”。
152.在特定标志xsp的值为“0”的情况下,cpu在步骤910中判定为“是”,进入步骤915。在步骤915中,cpu判定执行计时器texe的值是否比第1时间阈值t1th大。
153.在执行计时器texe的值为第1时间阈值t1th以下的情况下,cpu在步骤915中判定为“否”,进入步骤995,暂且结束本例程。
154.另一方面,在执行计时器texe的值比第1时间阈值t1th大的情况下,cpu在步骤915中判定为“是”,依次执行步骤920~步骤930。
155.步骤920:cpu基于来自摄像头传感器21的图像数据来识别边界线。
156.步骤925:cpu基于边界线来确定结束侧距离des。
157.步骤930:cpu判定结束侧距离des是否为阈值距离dth以下。
158.在结束侧距离des比阈值距离dth大的情况下,cpu在步骤930中判定为“否”,进入步骤995,暂且结束本例程。
159.另一方面,在结束侧距离des为阈值距离dth以下的情况下,cpu在步骤930中判定为“是”,依次执行步骤935和步骤940。
160.步骤935:cpu将执行标志xexe和执行计时器texe的值设定为“0”。
161.步骤940:cpu删除横向加速度映射mapgytgt(t)。
162.然后,cpu进入步骤995,暂且结束本例程。
163.本辅助装置10在特定条件未成立的情况下,通过在比特定条件成立的情况下早的定时开始避免车道偏离控制,增长避免车道偏离控制的执行时间。由此,能够使特定条件未成立的情况下的目标横向加速度gytgt的每单位时间的变化量(倾斜度)比特定条件成立的情况下的该变化量(倾斜度)小。由此,能够使特定条件未成立的情况下的方向盘sw的转速的大小(转向角速度的大小)比特定条件成立的情况下的该方向盘sw的转速的大小(转向角速度的大小)小。因此,能够降低产生方向盘sw的额外转动的可能性,也能够降低驾驶员对于方向盘进行非意图的操作的可能性。
164.本发明不限定于上述实施方式,可以在本发明的范围内采用各种变形例。
165.(第1变形例)
166.参照图10对本变形例的概要进行说明。
167.dsecu20在侧距离ds成为了必要侧距离dsn以下的情况下开始避免车道偏离控制(参照时间点t1)。若在该情况下特定条件未成立,则dsecu20通过使避免位置pp向与朝向行驶车道的宽度方向上的中央的方向相反的方向(纸面下方向)上假想地移动预定距离dp2来取得新的避免位置pp’。
168.dsecu20与上述实施方式的工作例的说明同样地求出必要时间tn。该必要时间tn比控制时间tc长。接着,dsecu20与上述实施方式的工作例的说明同样地求出横向加速度ga’,基于该横向加速度ga’来生成横向加速度映射mapgytgt(t)(参照图10的曲线图。)。
169.此外,在图10所示的横向加速度映射mapgytgt(t)中,在从开始时间点t1起到经过预定时间(tn-tc/2)为止的期间,目标加速度gytgt减少到横向加速度ga’,在从经过了上述预定时间(tn-tc/2)的时间点起到时间点t4为止的期间,目标加速度gytgt被维持为横向加速度ga’。
170.在特定条件未成立的情况下的避免车道偏离控制中,在从开始时间点t1经过了必要时间tn后的时间点t4,车辆va的基准点p到达避免位置pp’,并且,横向车速vsy成为零。
171.根据本变形例,在特定条件未成立的情况下,通过代替避免位置pp而使用避免位置pp’,避免车道偏离控制的执行时间(必要时间tn)变为比特定条件成立的情况下的该执
行时间长。由此,能够使特定条件未成立的情况下的基于避免车道偏离控制的方向盘sw的转速的大小(转向角速度的大小)比特定条件成立的情况下的方向盘sw的转速的大小(转向角速度的大小)小。
172.本变形例的dsecu20的cpu每当经过预定时间时执行图11所示的开始判定例程来代替图6所示的开始判定例程,每当经过预定时间时执行图7~图9所示的例程。在图11中,对进行与图6所示的步骤相同的处理的步骤赋予与在图6中所使用的标号相同的标号而省略说明。
173.cpu当成为预定定时时,从图11所示的步骤1100开始处理,进入图11所示的步骤605。在执行标志xexe的值为“0”的情况下,cpu在图11所示的步骤605中判定为“是”,依次执行图11所示的步骤615~步骤635,进入图11所示的步骤650。在侧距离ds比必要侧距离dsn大的情况下,cpu在图11所示的步骤650中判定为“否”,进入步骤1195,暂且结束本例程。在侧距离ds为必要侧距离dsn以下的情况下,cpu在图11所示的步骤650中判定为“是”,依次执行图11所示的步骤640和步骤645。
174.在特定标志xsp的值为“0”的情况下,cpu在图11所示的步骤645中判定为“是”,依次执行图11所示的步骤655和步骤660,进入步骤1195,暂且结束本例程。
175.在特定标志xsp的值为“1”的情况下,cpu在图11所示的步骤645中判定为“否”,进入步骤1105。在步骤1105中,cpu取得避免位置pp’,进入图11所示的步骤670,取得必要时间tn。然后,cpu依次执行图11所示的步骤655和步骤660,进入步骤1195,暂且结束本例程。
176.(第2变形例)
177.本变形例涉及的dsecu20在避免车道偏离控制的开始时间点、特定条件未成立的情况下,使用比在特定条件成立的情况下的避免车道偏离控制中使用的第1保护值grd1小的第2保护值grd2。由此,在特定条件未成立的情况下的避免车道偏离控制中,差分横向加速度δgy的绝对值(|δgy|)不变为比第2保护值grd2大。因此,能够使特定条件未成立的情况下的避免车道偏离控制的方向盘sw的转速的大小(转向角速度的大小)比特定条件成立的情况下的避免车道偏离控制的方向盘sw的转速的大小(转向角速度的大小)小。
178.本变形例的dsecu20的cpu每当经过预定时间时执行“从图11所示的开始判定例程删除了步骤645、步骤1105以及步骤670的开始判定例程”。
179.进一步,cpu每当经过预定时间时执行图12所示的避免车道偏离控制例程。在图12中,对进行与图8所示的步骤相同的处理的步骤赋予在图8中所使用的标号相同的标号而省略说明。
180.此外,cpu每当经过预定时间时执行图7和图9所示的例程。
181.cpu当成为预定定时时,从图12所示的步骤1200开始处理,进入图12所示的步骤805。在执行标志xexe的值为“0”的情况下,cpu在图12所示的步骤805中判定为“否”,进入步骤1295,暂且结束本例程。
182.在执行标志xexe的值为“1”的情况下,cpu在图12所示的步骤805中判定为“是”,执行图12所示的步骤810和步骤815。在特定标志xsp的值为“0”的情况下,cpu在图12所示的步骤815中判定为“是”,进入图12所示的步骤820。
183.在执行计时器texe的值为第1时间阈值t1th以下的情况下,cpu在图12所示的步骤820中判定为“是”,执行图12所示的步骤825,进入步骤1205。
184.在步骤1205中,cpu判定特定标志xsp的值是否为“0”。
185.在特定标志xsp的值为“0”的情况下,cpu在步骤1205中判定为“是”,进入步骤1210。在步骤1210中,cpu判定差分横向加速度δgy的绝对值(|δgy|)是否为预定的第1保护值grd1以下。
186.在绝对值(|δgy|)为第1保护值grd1以下的情况下,cpu在步骤1210中判定为“是”,进入图12所示的步骤835,发送转向指令。然后,cpu进入步骤1295,暂且结束本例程。
187.另一方面,在绝对值(|δgy|)比第1保护值grd1大的情况下,cpu在步骤1210中判定为“否”,进入步骤1215。在步骤1215中,cpu设定目标横向加速度gytgt以使得上述绝对值(|δgy|)成为第1保护值grd1以下,进入图12所示的步骤835。此外,目标横向加速度gytgt的设定的详细与图8所示的步骤840是同样的,因此,省略说明。
188.在cpu进入到步骤1205时特定标志xsp的值为“1”的情况下,cpu在步骤1205中判定为“否”,进入步骤1220。在步骤1220中,cpu判定上述绝对值(|δgy|)是否为预定的第2保护值grd2以下。此外,第2保护值grd2被预先设定为比第1保护值grd1小的值。
189.在上述绝对值(|δgy|)为第2保护值grd2以下的情况下,cpu在步骤1220中判定为“是”,进入图12所示的步骤835。另一方面,在上述绝对值(|δgy|)比第2保护值grd2大的情况下,cpu在步骤1220中判定为“否”,进入步骤1225。在步骤1225中,cpu设定目标横向加速度gytgt以使得上述绝对值(|δgy|)成为第2保护值grd2以下,进入图12所示的步骤835。
190.如根据以上可理解的那样,在特定条件未成立的情况下的避免车道偏离控制中,使用比第1保护值grd1小的第2保护值grd2。由此,能够防止方向盘sw的转速的大小(转向角速度的大小)变为比与第2保护值grd2对应的值大。因此,能够使特定条件未成立的情况下的避免车道偏离控制的方向盘sw的转速的大小(转向角速度的大小)比特定条件成立的情况下的避免车道偏离控制的方向盘sw的转速的大小(转向角速度的大小)小。
191.(第3变形例)
192.参照图13对第3变形例进行说明。
193.本变形例涉及的dsecu20在避免车道偏离控制的开始时间点(时间点t1)特定条件未成立的情况下,在从开始时间点起到经过预定时间td(<tc/2)为止的初始期间中,使目标横向加速度gytgt的倾斜度的大小比假定为“特定条件在开始时间点(时间点t1)成立的情况下的图13中由虚线表示的目标横向加速度gytgt的倾斜度的大小”小。由此,能够在初始期间中,使特定条件未成立的情况下的避免车道偏离控制的方向盘sw的转速的大小(转向角速度的大小)比特定条件成立的情况下的该大小小。
194.dsecu20以使得“以控制时间tc对特定条件未成立的情况下的目标横向加速度gytgt进行积分而得到的积分值(图13所示的曲线图中进行了填充的部分的面积)”与“以控制时间tc对假定为特定条件成立的情况下的目标横向加速度gytgt进行积分而得到的值(积分值)”一致的方式求出时间点t2以后的预定的横向加速度ga’。在初始期间中,与减小了目标横向加速度gytgt的倾斜度的大小的量相应地,横向加速度ga’的大小变大,横向加速度ga’的大小当然变为比假定为特定条件成立的情况下的横向加速度ga大。
195.当避免车道偏离控制开始时,方向盘sw开始旋转,因此,在避免车道偏离控制刚开始之后产生上述额外转动和上述非意图的操作的可能性高。根据本变形例,特定条件未成立的情况下的上述初始期间中的目标横向加速度gytgt的倾斜度的大小比假定为特定条件
成立的情况下的目标横向加速度gytgt的倾斜度的大小小。由此,能够使特定条件未成立的情况下的初始期间的方向盘sw的转速的大小比特定条件成立的情况下的方向盘sw的转速的大小小。
196.如上所述,以使得特定条件未成立的情况下的积分值与假定为特定条件成立的情况下的积分值一致的方式求出横向加速度ga’。因此,在从开始时间点(时间点t1)经过了控制时间tc后的时间点t3,横向车速vsy切实地成为零。
197.(第4变形例)
198.在上述实施方式中,驾驶员的方向盘sw的保持位置由触摸传感器26进行检测,但保持位置的检测不限定于此。例如,在车辆va具备对驾驶席进行拍摄的驾驶席摄像头,dsecu20也可以基于驾驶席摄像头拍摄到的图像来检测保持位置。
199.(第5变形例)
200.本辅助装置10不仅可以应用于上述发动机汽车,也可以应用于混合动力车(hev:hybrid electric vehicle)、插电式混合动力车(phev:plug-in hybrid electric vehicle)、燃料电池车(fcev:fuel cell electric vehicle)以及电动汽车(bev:battery electric vehicle)。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。