技术特征:
1.一种驾驶辅助装置,具备:驱动装置,其构成为通过对与车辆所具备的方向盘连结的转向轴提供转矩来对作为所述车辆的转向轮的角度的转向角进行变更;和控制单元,其构成为在预定的开始条件成立的情况下,执行避免车道偏离控制,所述避免车道偏离控制是对所述驱动装置进行控制以使得为了避免所述车辆从所述车辆正在行驶的行驶车道偏离而变更所述转向角的控制,所述控制单元构成为:以使得转向角速度的大小在所述开始条件的成立时间点保持位置不满足预定的特定条件的情况下比在所述成立时间点所述保持位置满足所述特定条件的情况下小的方式执行所述避免车道偏离控制,所述保持位置表示所述车辆的驾驶员的保持所述方向盘的手的位置,所述转向角速度是所述转向角的每单位时间的变化量。2.根据权利要求1所述的驾驶辅助装置,所述控制单元构成为:在所述保持位置不满足所述特定条件的情况下,与所述保持位置满足所述特定条件的情况相比,通过使所述开始条件的成立定时提前来延长所述避免车道偏离控制的执行时间。3.根据权利要求1所述的驾驶辅助装置,所述控制单元构成为:在从所述车辆的预定的基准点到在所述行驶车道的宽度方向上设定的避免位置为止的所述行驶车道的宽度方向上的宽度方向距离与必要距离一致的情况下,判定为所述开始条件成立,所述必要距离是用于使横向车速在经过了预定的控制时间时成为零所需要的距离,所述横向车速是所述车辆的车宽方向上的车速。4.根据权利要求3所述的驾驶辅助装置,所述控制单元构成为:在所述保持位置不满足所述特定条件的情况下,在所述宽度方向距离与所述必要距离一致之前判定为所述开始条件成立。5.根据权利要求3所述的驾驶辅助装置,所述控制单元构成为:在所述保持位置不满足所述特定条件的情况下,将所述避免位置设定为向与朝向所述宽度方向上的所述行驶车道的中央的方向相反的方向离开了预定距离的位置,使所述控制时间比所述保持位置满足所述特定条件的情况下的该控制时间长。6.根据权利要求1所述的驾驶辅助装置,所述控制单元构成为:在所述成立时间点所述保持位置不满足所述特定条件的情况下,在从所述成立时间点起到经过预定时间为止的初始期间中,使所述转向角速度的大小比假定为在所述成立时间点所述保持位置满足所述特定条件时的所述转向角速度的大小小,在从所述成立时间点经过了所述初始期间的时间点以后,将所述转向角速度的大小增大与在所述初始期间中使所述转向角速度的大小减小了的量相当的量。7.根据权利要求1所述的驾驶辅助装置,所述控制单元构成为:在所述避免车道偏离控制中,对所述驱动装置进行控制以使得所述转向角速度的大小不会变为比预定的保护值大,在所述成立时间点所述保持位置不满足所述特定条件的情况下,使用比在所述成立时间点所述保持位置满足所述特定条件的情况下小的保护值来执行所述避免车道偏离控制。
8.根据权利要求1~7中任一项所述的驾驶辅助装置,所述控制单元构成为:在所述驾驶员用双手保持着所述方向盘、且所述驾驶员保持所述方向盘的双手的位置相对于将所述方向盘处于中立位置时的正上的点和正下的点相连接的假想的基准线为线对称的情况下,判定为所述保持位置满足了所述特定条件。
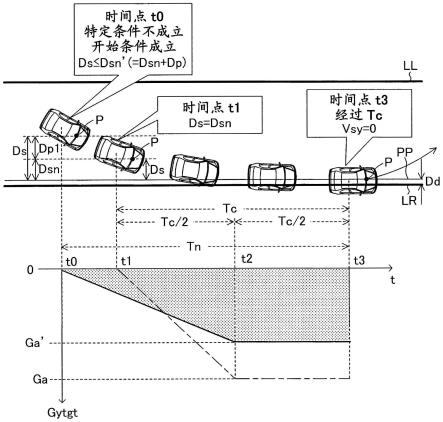
技术总结
驾驶辅助装置具备:驱动装置,其构成为通过对与车辆所具备的方向盘连结的转向轴提供转矩来对作为车辆的转向轮的角度的转向角进行变更;和控制单元。控制单元构成为在开始条件成立的情况下,执行避免车道偏离控制,该避免车道偏离控制是对驱动装置进行控制以使得为了避免车辆从行驶车道偏离而变更转向角的控制。控制单元构成为:在开始条件的成立时间点,在驾驶员的方向盘的保持位置不满足预定的特定条件的情况下,以使得转向角速度的大小比在成立时间点保持位置满足所述特定条件的情况下的该转向角速度的大小小的方式执行避免车道偏离控制,所述转向角速度是转向角的每单位时间的变化量。位时间的变化量。位时间的变化量。
技术研发人员:板摺一贵
受保护的技术使用者:丰田自动车株式会社
技术研发日:2022.08.05
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。