1.本发明公开一种适用于智慧大棚生产管理的智能优化方法,属于智慧农林的技术领域。
背景技术:
2.中国设施园艺机械化基础薄弱,与智能化相距甚远,传统大棚种植采取经验式生产管理模式,大棚中的种植管理为粗放型,较容易造成劳作堆积、收获堆积,并且在日常生产中或多或少会存在一些资源的浪费。随着科技的发展、技术的进步,应用现代自动化控制、电子信息和计算机技术建设的智慧大棚,实现环境控制数据的精准和实时控制,随之对作物生长规律研究深入,作物种植进入精细管理,不同生长阶段各种参数精准量化。
3.针对上述改观,实现作物生命全周期过程工业化管理,实现全生命周期智慧大棚与工业智能化的实现历程相仿,其中实现全程机械化是基础,设施园艺机械化、自动化是智能化的基础条件。工厂化育苗对产业的节点带动作用显著,在育苗生产中,不同环节的经济效率杠杆作用差异很大,差异源于劳动力的使用及人工作业对质量的影响。
4.为使大棚中生产任务产生合理调度,优化作物生产周期,本技术领域中将基于全生命周期的智慧大棚将改进后的算法应用优化生产管理中。
技术实现要素:
5.针对现有技术的不足,本发明公开一种适用于智慧大棚生产管理的智能优化方法。
6.本发明详细的技术方案如下:
7.一种适用于智慧大棚生产管理的智能优化方法,其特征在于,包括:
8.(1)选定初始参数:
9.大棚生产种植中存在多作物和作物多阶段生长过程,将大棚按照区域ri进行划分,每个区域ri中含有确定的作物生长阶段数ci,认为区域是最小操作单位且区域内的作物生长处于同一时期,不同区域内的植物生长周期可能不同,不同区域内的作物之间无相互影响关系,作物由工人m进行劳作,区域内的作物从当前生长阶段到下一生长阶段是需时间进行成长,故将作物生长阶段间的生长时间称为生长间隙pi;
10.作物一旦被劳作就不能中断,区域i内作物的第j个生长阶段o
ij
的完工时间为作物劳作开始时间和作物劳作处理时间之和;s
ijk
、h
ijk
、e
ijk
分别表示生长阶段o
ij
在工人k上加工的开始时间、加工时间和完工时间:
11.e
ijk
=s
ijk
h
ijk
ꢀꢀꢀ
(ⅰ)
12.工人劳作完后处于空闲状态,工人空闲开始时间为工人劳作完后的结束时间,mk为工人k的空闲时间开始时间点:
13.mk=e
ijk
ꢀꢀꢀ
(ⅱ)
14.作物劳作的开始加工时间由前一道作物劳作结束的完工时间和作物当前生长阶
段的生长间隙之和与所选人工的空闲时间决定,e
i(j-1)k`
表示生长阶段o
i(j-1)
在机器k`上的完工时间,p
i(j-1)
表示作物的生长间隙:
15.s
ijk
=max{e
i(j-1)k`
p
i(j-1)
,mk}
ꢀꢀꢀ
(ⅲ)
16.同一时间一个人只能劳作一个区域内的作物:
17.e
tk-e
xk
inf(1-p
xtk
)≥h
tk
ꢀꢀꢀ
(ⅳ)
18.x,t=1,2,
……
,n;k=1,2,
……
,m
19.e
tk
表示工人k在t区域内劳作的结束时间,e
xk
表示工人k在x区域内劳作的结束时间;h
tk
表示工人k在t区域内劳作时间;n和m分别表示作业和机器数,inf表示正无穷,p
xtk
表示作业x和作业t的优先级,当作业x先于作业t被工人k劳作则p
xtk
=1,否则为0;
20.区域间不存在劳作顺序约束,但同一区域的所属作物生长阶段存在严格的顺序约束:
21.s
ijk
≥e
i(j-1)k`
ꢀꢀ
(
ⅴ
)
22.所有作业都在零时刻处理:
23.s
ijk
≥0
ꢀꢀ
(ⅵ)
24.e
ijk
≥0
ꢀꢀ
(ⅶ)
25.同一时刻同一作物只能选择一个人进行劳作,w
ijk
表示区域i的第j个作物生长阶段是否是人工k进行劳作:
[0026][0027]
以最小最大完工时间为目标建立目标函数:
[0028]
f=min(makespan)=min(max
1≤k≤m
mk)
ꢀꢀ
(
ⅸ
)
[0029][0030]
其中,mk是最后一个工人工作结束的时间节点;makespan表示各工人的最大完成时间,是衡量加工效率的主要指标;
[0031]
(2)建立优化算法模型:
[0032]
对大棚中的生产劳作进行合理排序使整体劳作时间最短,即以大棚中人工劳作的最小最大完工时间为优化目标,将基于天牛须改进的樽海鞘群算法应用到求解所述目标函数中:
[0033]
随机初始化种群生成位置向量,个体均是由上下限范围内的小数构成,长度与作物生长阶段数量相同,将个体位置向量里的随机数按照rov(ranked order value)规则为每个随机数赋予唯一的rov值,按照rov值与作物生长阶段的对应关系为每个随机数赋予作物生长阶段编码,具体解释如图3所示,生成的作物生长阶段排序则是界限内连续值对应的调度计划,此时个体位置向量已经解码出其实际含义,将得到的作物生长阶段排序按照从左到右依次为其安排工人劳作,在选择工人时按照最近空闲时间选择,一个完整的调度计划生成后计算其完工时间,并按照上述约束将种群中的全部个体进行计算,选出种群内的最优,进行食物源更新,至此一个完整的位置向量到调度计划的解码完成;
[0034]
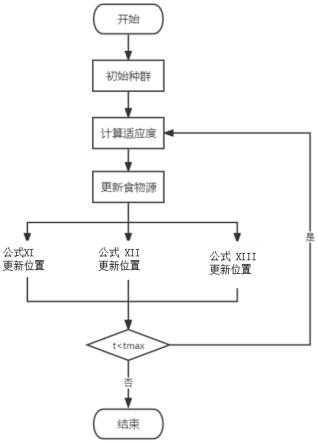
初始化生成的位置向量进行位置更新,在第t次迭代时樽海鞘群领导者的位置更新公式为:
[0035][0036]
其中,fm是m维空间中的食物源位置,t为当前迭代次数,t为最大迭代次数,c2、c3是[0,1]上的随机数,ub为个体位置上限,lb为个体位置的下限;
[0037]
追随者的位置更新公式为:
[0038][0039]
其中,表示m维空间第t-1个追随者的位置;
[0040]
在第t次迭代时天牛须的位置更新公式为:
[0041][0042][0043][0044][0045]
其中,δ
t
为步长因子,x
l
、xr为天牛须的左右位置,为随机位置,sign为符号函数,f(x)为适应度函数,l表示天牛质心与触须的距离;
[0046]
其中,樽海鞘群的更新方式面对的是整个种群的更新,天牛须面对的食物源的位置更新;
[0047]
(3)确定食物源位置
[0048]
当两种方式将位置更新完毕后,按照f(x)计算更新后的适应度,选取适应度最优的个体位置作为食物源位置,适应度最优为目标函数的最优值,在本专利中是对调度计划的整体劳作时间进行优化,时间最小即为适应度最优。
[0049]
根据本发明优选的,所述优化方法,还包括:待满足初期设置的循环条件后跳出约束,此时食物源位置是找到的最优位置,将食物源位置进行解码输出后即为一个完整的调度计划,其中t表示当前迭代次数,tmax表示最大迭代次数。
[0050]
本发明的技术优势:
[0051]
本发明所述优化方法通过采样改进后的算法在寻优能力、寻优精度上都有提高很多,将改进后的算法应用到智慧大棚的智能优化生产管理中求解调度计划,既保证了调度计划的优越性也大大缩短了求解一个完整调度计划所耗费的时间,由该优化方法产生的调度计划可以使一个生产计划以最小时间单位完成,缩短空闲时间,保证生产效率。
[0052]
与现有技术相比,本发明具有以下有效效果:
[0053]
(1)本发明将改进的算法应用于智慧大棚的智能优化生产管理中,具有快速的全局寻优能力,能够快速跳出局部极值,进而改善了其他算法中存在早熟和搜索性能差的问题。采用本发明的方法进行大棚的智能优化生产管理,可以提升种群的多样性和解集精度,同时提升企业生产效率,保证企业的经济效益。
[0054]
(2)完整的寻优方案还可以移植到其他单目标寻优应用场景中,具有一定的通用性,且易于推广。
附图说明
[0055]
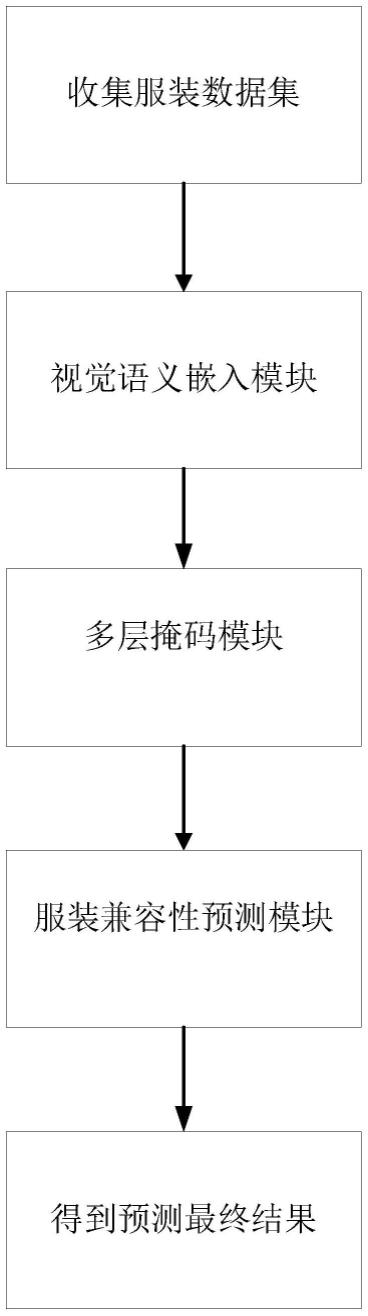
图1是本发明所述优化方法的流程示意图,在图1中,所述t
max
为最大迭代次数由管理人员自动设置;
[0056]
图2是作物生长阶段的排序示意图;
[0057]
图3是位置向量与作物生长阶段排序的转换示意图;
[0058]
图4是本发明所述优化方法所得到的调度计划示意图;
[0059]
图5是本发明只进行樽海鞘群算法应用得到的调度计划示意图。
具体实施方式
[0060]
下面结合实施例和说明书附图对本发明做详细的说明,但不限于此。
[0061]
实施例1、
[0062]
一种适用于智慧大棚生产管理的智能优化方法,包括:
[0063]
(1)选定初始参数:
[0064]
大棚生产种植中存在多作物和作物多阶段生长过程,将大棚按照区域ri进行划分,每个区域ri中含有确定的作物生长阶段数ci,认为区域是最小操作单位且区域内的作物生长处于同一时期,不同区域内的植物生长周期可能不同,不同区域内的作物之间无相互影响关系,作物由工人m进行劳作,区域内的作物从当前生长阶段到下一生长阶段是需时间进行成长,故将作物生长阶段间的生长时间称为生长间隙pi;
[0065]
作物一旦被劳作就不能中断,区域i内作物的第j个生长阶段o
ij
的完工时间为作物劳作开始时间和作物劳作处理时间之和;s
ijk
、h
ijk
、e
ijk
分别表示生长阶段o
ij
在工人k上加工的开始时间、加工时间和完工时间:
[0066]eijk
=s
ijk
h
ijk
ꢀꢀꢀ
(ⅰ)
[0067]
工人劳作完后处于空闲状态,工人空闲开始时间为工人劳作完后的结束时间,mk为工人k的空闲时间开始时间点:
[0068]
mk=e
ijk
ꢀꢀ
(ⅱ)
[0069]
作物劳作的开始加工时间由前一道作物劳作结束的完工时间和作物当前生长阶段的生长间隙之和与所选人工的空闲时间决定,e
i(j-1)k`
表示生长阶段o
i(j-1)
在机器k`上的完工时间,p
i(j-1)
表示作物的生长间隙:
[0070]sijk
=max{e
i(j-1)k`
p
i(j-1)
,mk}
ꢀꢀ
(ⅲ)
[0071]
同一时间一个人只能劳作一个区域内的作物:
[0072]etk-e
xk
inf(1-p
xtk
)≥h
tk
ꢀꢀ
(ⅳ)
[0073]
x,t=1,2,
……
,n;k=1,2,
……
,m
[0074]etk
表示工人k在t区域内劳作的结束时间,e
xk
表示工人k在x区域内劳作的结束时间;h
tk
表示工人k在t区域内劳作时间;n和m分别表示作业和机器数,inf表示正无穷,p
xtk
表示作业x和作业t的优先级,当作业x先于作业t被工人k劳作则p
xtk
=1,否则为0;
[0075]
区域间不存在劳作顺序约束,但同一区域的所属作物生长阶段存在严格的顺序约束:
[0076]sijk
≥e
i(j-1)k`
ꢀꢀ
(
ⅴ
)
[0077]
所有作业都在零时刻处理:
[0078]sijk
≥0
ꢀꢀ
(ⅵ)
[0079]eijk
≥0
ꢀꢀ
(ⅶ)
[0080]
同一时刻同一作物只能选择一个人进行劳作,w
ijk
表示区域i的第j个作物生长阶段是否是人工k进行劳作:
[0081][0082]
以最小最大完工时间为目标建立目标函数:
[0083]
f=min(makespan)=min(max
1≤k≤m
mk)
ꢀꢀ
(
ⅸ
)
[0084][0085]
其中,mk是最后一个工人工作结束的时间节点;makespan表示各工人的最大完成时间,是衡量加工效率的主要指标;
[0086]
(2)建立优化算法模型:
[0087]
对大棚中的生产劳作进行合理排序使整体劳作时间最短,即以大棚中人工劳作的最小最大完工时间为优化目标,将基于天牛须改进的樽海鞘群算法应用到求解所述目标函数中:
[0088]
随机初始化种群生成位置向量,个体均是由上下限范围内的小数构成,长度与作物生长阶段数量相同,将个体位置向量里的随机数按照rov(ranked order value)规则为每个随机数赋予唯一的rov值,按照rov值与作物生长阶段的对应关系为每个随机数赋予作物生长阶段编码,具体解释如图3所示,生成的作物生长阶段排序则是界限内连续值对应的调度计划,此时个体位置向量已经解码出其实际含义,将得到的作物生长阶段排序按照从左到右依次为其安排工人劳作,在选择工人时按照最近空闲时间选择,一个完整的调度计划生成后计算其完工时间,并按照上述约束将种群中的全部个体进行计算,选出种群内的最优,进行食物源更新,至此一个完整的位置向量到调度计划的解码完成;
[0089]
初始化生成的位置向量进行位置更新,在第t次迭代时樽海鞘群领导者的位置更新公式为:
[0090][0091]
其中,fm是m维空间中的食物源位置,t为当前迭代次数,t为最大迭代次数,c2、c3是[0,1]上的随机数,ub为个体位置上限,lb为个体位置的下限;
[0092]
追随者的位置更新公式为:
[0093][0094]
其中,表示m维空间第t-1个追随者的位置;
[0095]
在第t次迭代时天牛须的位置更新公式为:
[0096][0097][0098]
[0099][0100]
其中,δ
t
为步长因子,x
l
、xr为天牛须的左右位置,为随机位置,sign为符号函数,f(x)为适应度函数,l表示天牛质心与触须的距离;
[0101]
其中,樽海鞘群的更新方式面对的是整个种群的更新,天牛须面对的食物源的位置更新;
[0102]
(3)确定食物源位置
[0103]
当两种方式将位置更新完毕后,按照f(x)计算更新后的适应度,选取适应度最优的个体位置作为食物源位置,适应度最优为目标函数的最优值,在本专利中是对调度计划的整体劳作时间进行优化,时间最小即为适应度最优。
[0104]
根据本发明优选的,所述优化方法,还包括:待满足初期设置的循环条件后跳出约束,此时食物源位置是找到的最优位置,将食物源位置进行解码输出后即为一个完整的调度计划,其中t表示当前迭代次数,tmax表示最大迭代次数。
[0105]
在具体实施时的步骤如下:
[0106]
首先,在本发明所述优化方法中输入以下参数,将温室大棚精细化生产过程整理成表格形式,在优化作物生产周期问题中输入的数据为大棚的基本信息,如:共有多少区域,每个区域作物都有哪些生长阶段,每个生长阶段的处理时间是多少且相邻生长阶段之间的间隙时间是多少,根据输入的大棚信息产生合理的调度计划。
[0107]
表1:大棚的基本信息
[0108]
[0109][0110]
其次,对输入数据进行处理:采取唯一编码的形式即只对作物生长阶段进行编码,作物生长阶段排序中基因位代表了区域号,在排序中出现的位置表示当前区域作物内所处的第几个生长阶段,如:一条作物生长阶段排序编码为[3,3,2,3,2,1,1,2,1],则第一个3表示第三个区域的第一个阶段,第三个2表示第二个区域的第三个阶段;位置向量解码到作物生长阶段排序过程如图2所示,一个位置向量即可解释为一个完整的调度计划。
[0111]
随机初始化种群,当前个体均是由上下限范围内的小数构成,长度与作物生长阶段数量相同,将个体位置向量里的随机数按照rov(ranked order value)规则为每个随机数赋予唯一的rov值,按照rov值与作物生长阶段的对应关系为每个随机数赋予作物生长阶段编码,生成的作物生长阶段排序则是界限内连续值对应的调度计划。
[0112]
此时个体位置向量由小数已经解码出其实际含义,将得到的作物生长阶段排序按照从左到右依次为其安排工人劳作,在选择工人时按照最近空闲时间选择,一个完整的调度计划生成后计算其完工时间,并按照上述约束将种群中的全部个体进行计算,选出种群内的最优,进行食物源更新,至此一个完整的位置向量到调度计划的解码完成。
[0113]
在利用本实施例步骤(2)和(3)进行处理。
[0114]
最后,处理结果的输出:输出的是一个完整的调度计划如下图4所示,图示表示最小最大完工时间为36,同样颜色表示同一个区域作物,如:“4,2=2”表示4区域作物的第2阶段的加工时间为2,按照所述调度计划为工人进行任务安排即可。图5的内容解析和图4的内容解析方法一致,但图5并未经历本发明的优化过程,因此,由图可知,图5所需的劳作时间比图4所需的劳作时间长。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。