技术特征:
1.一种适用于智慧大棚生产管理的智能优化方法,其特征在于,包括:(1)选定初始参数:大棚生产种植中存在多作物和作物多阶段生长过程,将大棚按照区域r
i
进行划分,每个区域r
i
中含有确定的作物生长阶段数c
i
,区域内的作物从当前生长阶段到下一生长阶段是需时间进行成长,故将作物生长阶段间的生长时间称为生长间隙p
i
;s
ijk
、h
ijk
、e
ijk
分别表示生长阶段o
ij
在工人k上加工的开始时间、加工时间和完工时间:e
ijk
=s
ijk
h
ijk
ꢀꢀꢀꢀ
(ⅰ)m
k
为工人k的空闲时间开始时间点:m
k
=e
ijk
ꢀꢀꢀꢀ
(ⅱ)e
i(j-1)k`
表示生长阶段o
i(j-1)
在机器k`上的完工时间,p
i(j-1)
表示作物的生长间隙:s
ijk
=max{e
i(j-1)k`
p
i(j-1)
,m
k
}
ꢀꢀꢀꢀ
(ⅲ)同一时间一个人只能劳作一个区域内的作物:e
tk-e
xk
inf(1-p
xtk
)≥h
tk
ꢀꢀꢀꢀ
(ⅳ)x,t=1,2,
……
,n;k=1,2,
……
,me
tk
表示工人k在t区域内劳作的结束时间,e
xk
表示工人k在x区域内劳作的结束时间;h
tk
表示工人k在t区域内劳作时间;n和m分别表示作业和机器数,inf表示正无穷,p
xtk
表示作业x和作业t的优先级,当作业x先于作业t被工人k劳作则p
xtk
=1,否则为0;区域间不存在劳作顺序约束,但同一区域的所属作物生长阶段存在严格的顺序约束:s
ijk
≥e
i(j-1)k`
ꢀꢀꢀꢀ
(
ⅴ
)所有作业都在零时刻处理:s
ijk
≥0
ꢀꢀꢀꢀ
(ⅵ)e
ijk
≥0
ꢀꢀꢀꢀ
(ⅶ)同一时刻同一作物只能选择一个人进行劳作,w
ijk
表示区域i的第j个作物生长阶段是否是人工k进行劳作:以最小最大完工时间为目标建立目标函数:f=min(makespan)=min(max
1≤k≤m
m
k
)
ꢀꢀꢀꢀ
(
ⅸ
)其中,m
k
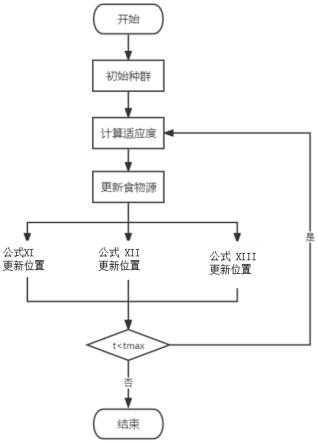
是最后一个工人工作结束的时间节点;makespan表示各工人的最大完成时;(2)建立优化算法模型:将基于天牛须改进的樽海鞘群算法应用到求解所述目标函数中:初始化生成的位置向量进行位置更新,在第t次迭代时樽海鞘群领导者的位置更新公式为:其中,f
m
是m维空间中的食物源位置,t为当前迭代次数,t为最大迭代次数,c2、c3是[0,1]上的随机数,ub为个体位置上限,lb为个体位置的下限;
追随者的位置更新公式为:其中,表示m维空间第t-1个追随者的位置;在第t次迭代时天牛须的位置更新公式为:须的位置更新公式为:须的位置更新公式为:须的位置更新公式为:其中,δ
t
为步长因子,x
l
、x
r
为天牛须的左右位置,为随机位置,sign为符号函数,f(x)为适应度函数,l表示天牛质心与触须的距离;其中,樽海鞘群的更新方式面对的是整个种群的更新,天牛须面对的食物源的位置更新;(3)确定食物源位置当两种方式将位置更新完毕后,按照f(x)计算更新后的适应度,选取适应度最优的个体位置作为食物源位置。2.根据权利要求1所述一种适用于智慧大棚生产管理的智能优化方法,其特征在于,所述优化方法,还包括:待满足初期设置的循环条件后跳出约束,此时食物源位置是找到的最优位置,将食物源位置进行解码输出后即为一个完整的调度计划。
技术总结
一种适用于智慧大棚生产管理的智能优化方法,包括:(1)选定初始参数;(2)建立优化算法模型:其中,樽海鞘群的更新方式面对的是整个种群的更新,天牛须面对的食物源的位置更新;(3)确定食物源位置当两种方式将位置更新完毕后,按照f(x)计算更新后的适应度,选取适应度最优的个体位置作为食物源位置,适应度最优为目标函数的最优值,在本专利中是对调度计划的整体劳作时间进行优化,时间最小即为适应度最优,待满足初期设置的循环条件后跳出约束,此时食物源位置是找到的最优位置,将食物源位置进行解码输出后即为一个完整的调度计划。本发明所述优化方法既保证了调度计划的优越性也大大缩短了求解一个完整调度计划所耗费的时间。间。间。
技术研发人员:张梦 张让勇 白金强 程广河 郝凤琦 顾笑言
受保护的技术使用者:齐鲁工业大学 山东山科智控数字化科技有限公司
技术研发日:2022.10.12
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。