1.本发明涉及光纤陀螺技术领域,尤其涉及一种提高光纤陀螺零偏稳定性的方法。
背景技术:
2.光纤陀螺是一种基于sagnac效应的角速率传感器,具有全固态结构、抗冲击振动、动态范围大、频带宽、易于数字化实现等优点。光纤陀螺光源发出的光波经过光纤耦合器和y波导相位调制器后,分成两束光波在光纤环圈中相反的两个方向传输,而后到达y波导相位调制器时发生干涉。当光纤陀螺存在一个旋转角速率时,光纤环圈内相向传输的两束光波经历的光程不同,产生相位差,该相位差的大小与旋转角速率成正比。为实现光纤陀螺闭环工作,必须在光纤环圈中引入大小相等、方向相反的非互易补偿相移,以抵消由于每个光纤环圈转动产生的sagnac相移,使光纤陀螺始终工作在零相位差点附近。在引入补偿相位的同时,即可获得陀螺的输入转速信息。
3.数字闭环光纤陀螺信号处理方案采用方波偏置调制、阶梯波反馈。探测器输出信号先经过滤波、放大,经a/d的采样,由fpga读入并进行同步信号解调。该解调值经数字积分器积分后控制反馈阶梯波的阶梯高度,在fpga内产生的阶梯波经对应的d/a转换运放放大后加到对应的y波导相位调制器上。阶梯波产生的相移随着阶梯高度的变化而变化,在通过闭环系统不断调整后达到平衡状态,此时阶梯波的阶梯高度正比于萨格纳克相移,此阶梯波高度值数据与温度采集数据打包后由一个rs422接口送出,送达导航设备作为转速信息。
4.陀螺精度的提升意味着敏感输入的角速度越来越小,光纤陀螺探测器输出的电压信号也越小。这就要求光路、电路的噪声起码不能超过探测器的输出电压大小。调制解调电路的ad转换器的量化噪声是调制解调电路的主要噪声之一。ad转换器的转换位数越高,其量化噪声越小。但是在实际工程使用中,一方面单个ad转换器的转换位数和转换速度无法持续提高,ad转换器的量化噪声无法持续变小;另一方面即使单个ad转换器的位数和速度持续提高到满足要求,其价格也将指数级增加,工程应用中无法大量使用。
技术实现要素:
5.本发明所要解决的技术问题是提供一种提高光纤陀螺零偏稳定性的方法,通过并联多个ad转换器,有效消除了ad转换器、探测器及前放电路的共模噪声,有效提高了陀螺的零偏稳定性。
6.本发明是通过以下技术方案予以实现:
7.一种提高光纤陀螺零偏稳定性的方法,其包括如下步骤:s1:光源发出的光波经过光纤耦合器及y波导相位调制后,分成两束光波在光纤环圈中沿相反的两个方向传输,而后到达y波导相位调制后发生干涉,再返回到光纤耦合器;s2:探测器探测出光纤耦合器的电压信号分别输出给多个并联的ad转换器;s3:多个ad转换器将收到的电压信号分别转换成数字信号后再经调制解调为角速度信号;
s4:其中一个ad转换器将调制解调后未优化的角速度信号分为两路,一路输出给加法器进行优化,另一路直接将未优化的角速度信号输出给选择开关,其余ad转换器分别将调制解调后的角速度信号输出给加法器,加法器将收到的所有ad转换器的角速度信号进行叠加后再进行幅度调整,得到优化后的角速度信号输出给选择开关,选择开关在未优化的角速度信号与优化后的角速度信号之间选择一路反馈给da转换器,并经da转换器转化成电压信号,再经过运算放大器放大后反馈给y波导形成闭环;进一步,s2中多个并联的ad转换器位数相同。
8.进一步,s4中对叠加后的角速度信号值进行幅度调整时,将叠加后的角速度信号值除以ad转换器的数量,得到优化后的角速度值。
9.进一步,选择开关在未优化的角速度信号与优化后的角速度信号之间选择一路作为光纤陀螺输出信号。
10.发明的有益效果:本发明提供的一种提高光纤陀螺零偏稳定性的方法,通过并联多个ad转换器,可以有效消除ad转换器、探测器及前放电路的共模噪声,能够满足日益增长的陀螺精度需求,并且成本低,采样速度快,具有工程应用价值。
附图说明
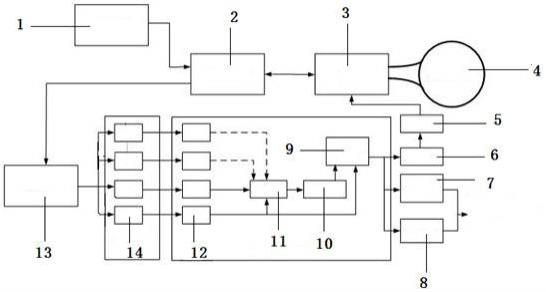
11.图1是本发明系统示意图。
12.图2是本发明未优化的角速度零偏稳定性输出示意图。
13.图3是本发明优化的角速度零偏稳定性输出示意图。
14.图中:1.光源,2.光纤耦合器,3.y波导,4.光纤环圈,5.运算放大器,6.da转换器,7.优化后的角速度信号,8.未优化的角速度信号,9.选择开关,10.幅度调整器,11.加法器,12.调制解调器,13.探测器,14.ad转换器。
具体实施方式
15.一种提高光纤陀螺零偏稳定性的方法,具体原理图如附图1所示,其包括如下步骤:s1:光源1发出的光波经过光纤耦合器2及y波导3相位调制后,分成两束光波在光纤环圈4中沿相反的两个方向传输,而后到达y波导相位调制后发生干涉,再返回到光纤耦合器;s2:探测器13探测出光纤耦合器的电压信号分别输出给多个并联的ad转换器14;s3:多个ad转换器将收到的电压信号分别转换成数字信号后再经调制解调器12解调为角速度信号;s4:其中一个ad转换器将调制解调后未优化的角速度信号分为两路,一路输出给加法器11进行优化,另一路直接将未优化的角速度信号输出给选择开关9,其余ad转换器分别将调制解调后的角速度信号输出给加法器,加法器将收到的所有ad转换器的角速度信号进行叠加后再通过幅度调整器10进行幅度调整,得到优化后的角速度信号输出给选择开关,选择开关在未优化的角速度信号与优化后的角速度信号之间选择一路反馈给da转换器6,并经da转换器转化成电压信号,再经过运算放大器5放大后反馈给y波导形成闭环。
首先,光纤陀螺中探测器输出的电压信号大小可由式(1)进行计算,首先,光纤陀螺中探测器输出的电压信号大小可由式(1)进行计算,(1)
16.式中:为到达探测器的光强;为sanac增益系数,;为探测器转换系数,;为调制深度;为敏感角速率;l为光纤长度;d为环圈等效直径;为波长,c为光速;为光电转换效率;为跨阻抗。
17.若光纤陀螺零偏稳定性要求0.003
°
/h,各个参数,,,,,,,,,将数值代入式(1)中就可以计算出探测器输出的电压信号。根据信号处理理论,单位时间ad内(1s)ad转换器可以分辨的最小噪声可由式(2)计算;(2)
18.其中为ad转换器的参考电压;为ad转换器的位数;为采样频率;为放大器增益;假设ad转换器的设计参数如下:,,,根据需要检测的电压幅度,当=时,将上述参数代入公式(2)计算可以得到ad转换器的位数n;根据计算出的 =10.1位,则要求ad转换器最低转换位数为11位,考虑到量化噪声指标,选取12位ad转换器作为采样芯片。将n=12代入公式(2)可以得到,说明ad转换器能够满足探测器输出的电压信号的要求,即满足陀螺指标要求。
19.上述计算是以陀螺精度要求为0.003
°
/h为前提的,但随着导航精度的提升,对陀
螺的精度要求越来越高,现在已经有0.0005
°
/h,甚至0.0001
°
/h的陀螺要求,ad转换器通过位数的更新已经跟不上陀螺精度的提升要求了。
20.因此引入本技术的技术方案,通过并联多个ad转换器,并将多个ad转换器的角速度信号进行叠加后再进行幅度调整,得到优化后的角速度信号反馈给da转换器形成数字闭环。
21.具体原理如下:多个ad转换器并联后,其量化噪声如式(3)所示;(3)其中是光纤陀螺多个ad转换器转换后的量化噪声;是ad1转换器的量化噪声;是ad2转换器的量化噪声;是adn转换器的量化噪声,n为ad转换器的数量。
22.以n=2为例,当ad1转换器与ad2转换器为同一ad转换器时,根据式(3)可知,陀螺整体ad转换器的量化噪声变为了单个ad转换器的。理想的ad转换器对模拟信号转换时,最大误差为,lsb表示ad转换器的最小输入分辨率,量化噪声可以近似为[-]范围内的随机分布,当经过相加和幅度调整后,量化噪声的范围可以变为, 即陀螺整体的ad转换器的量化噪声变为了单个ad转换器的,有效减少了单个ad转换器的固有噪声,提升了光纤陀螺的信噪比,并且通过增加并联ad转换器的个数,可以满足陀螺精度不断提升的要求,并且成本比较低,无需增加ad转换器的位数,具有工程应用价值。
23.同时系统的转化速度,其中是ad1转换器的转换速度,是ad2转换器的转换速度,是adn转换器的转换速度,由此可见,采用本发明提供的一种提高光纤陀螺零偏稳定性的方法,陀螺整体ad转换器的转换速度成倍增长,并且大大提高了陀螺的采样速率。
24.同时设置选择开关,在未优化的角速度信号与优化后的角速度信号之间选择一路反馈给da转换器,并经da转换器转化成电压信号,再经过运算放大器放大后反馈给y波导形成闭环,可以根据需要对选择两种信号进行选择,并且可以方便将两种结果的陀螺输出进行比较,从而方便验证本技术所取得的有益效果。
25.进一步,s2中多个并联的ad转换器位数相同,方便装配,并且便于后期的幅度调整。
26.进一步,s4中对叠加后的角速度信号值进行幅度调整时,将叠加后的角速度信号
值除以ad转换器的数量,得到优化后的角速度值,计算方法简单快捷,具有工程应用价值。
27.进一步,选择开关在未优化的角速度信号8与优化后的角速度信号7之间选择一路作为光纤陀螺输出信号。这样设置,通过选择开关对两组数据进行选择反馈给da转换器,再由da转换器转换后反馈给y波导形成闭环,并且同时将该组信号进行导出作为陀螺输出,方便对两组数据进行比较,充分验证本发明提供的方法对陀螺零偏稳定性的影响。具体当选择开关选择未优化的角速度信号作为陀螺输出时,其零偏稳定性如附图2所示,选择开关选择优化后的角速度信号作为陀螺输出时,其零偏稳定性如附图3所示,将附图2与附图3进行比较后可知,选择优化后的角速度信号反馈给da转换器,陀螺零偏稳定性明显提升。
28.综上所述,本发明提出的一种提高光纤陀螺零偏稳定性的方法,通过并联多个ad转换器,可以有效消除ad转换器、探测器及前放电路的共模噪声,能够满足日益增长的陀螺精度需求,并且成本低,采样速度快,具有工程应用价值。
29.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。