1.本技术涉及工程机械数据处理技术领域,具体涉及一种隧道装备臂架系统的分析方法。
背景技术:
2.在当今隧道工程领域,cae(计算机辅助工程)目前应用已得到广泛应用,成为隧道装备开发、解决问题,支持产品开发的一种有效工具,其中有限元在结构应力、变形、疲劳、拓扑减重、屈曲等方面可以获得较高的精度,能解决工程开发、降低成本多方面的问题。
3.有限元分析的基础是变分原理和加权余量法,其基本的求解思想是将结构离散成有限个互不重叠的单元,并在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各个变量或其导数的节点值与所选用的插值函数组合成的线性表达式,对微分方程进行离散求解,所以结构的离散效果和边界处理(有限元模型)是影响有限元精度的重要因素,但有限元分析软件对从业人员的专业性要求较强,给从事隧道装备的技术人员造成了一定障碍。
4.目前对于隧道装备的臂架系统的结构计算方法通常采用解析计算法。解析法是基于材料力学、理论力学公式及国家标准和厂家技术规范和行业规范,经过多年发展而形成的计算方法,其主要的特点是将臂架系统分解成各个子系统,如:臂架主体、伸缩系统、变幅机构、转向机构等,其中对于臂架主体简化成理想的梁结构,并根据力学理论及相关标准给出的经验公式,对臂架结构的最大应力去进行应力校核,对其他部分则按照力的平衡原则推导公式,但实际计算过程中,解析法存在如下问题:(1)当臂架较长、臂架的节数较多时,臂架系统由于装配和变形等因素,臂架将发生显著挠变,此时臂架自重及外部载荷产生的力臂发生线性弹性变法,因此无法计算臂架大变形下产生的几何非线性效应,且解析法无法分析机构的运动特性;(2)解析法对于伸缩系统、变幅系统结构件和油缸的计算,需手工转换和推导公式,推导过程繁琐,计算量大;(3)解析法无法计算臂架和臂架滑块搭接处、油缸支座等关键部位的应力,但此处容易发生应力集中,导致臂架发生破坏。
5.臂架系统作为隧道装备的关键零部件,其主要作用是承载隧道装备工作时所受到的负载,以保证设备能正常工作,但实际隧道内的工况往往复杂又恶劣,对臂架系统进行分析是隧道装备开发很重要的一项工作。
技术实现要素:
6.有鉴于此,本发明提供一种隧道装备臂架系统的分析方法,旨在解决现有分析方法精准度低且难以应用于复杂工况的技术问题。
7.为解决以上技术问题,本发明的技术方案为提供一种隧道装备臂架系统的分析方法,包括:
建立臂架系统的三维模型,并对所述三维模型进行运动特性分析;基于所述运动特性分析的结果,对所述三维模型进行多刚体动力学分析;对所述三维模型进行预处理,并划分有限元网格;基于所述多刚体动力学分析的结果,确定边界条件,得到所述臂架系统的有限元模型;对所述有限元模型求解计算,得到臂架系统的分析结果。
8.本发明的原理在于采用运动特性分析、多刚体动力学和非线性静力学进行联合仿真,通过运动特性分析求解出臂架系统的工作范围,分析机构运动特性,确保臂架系统不会发生干涉及其工作范围是否满足设计需求,并为刚体动力学研究提供基础理论依据,进而利用多刚体动力学确定静力学分析的边界条件,以减少静力学分析的计算量,降低有限元分析的时间。
9.可选的,所述对所述三维模型进行运动特性分析,包括:建立臂架系统各工作杆件及杆件与末端部件之间的位置姿态关系,求解出所述臂架系统的工作范围,并分析机构运动特性。
10.可选的,所述基于所述运动特性分析的结果,对所述三维模型进行多刚体动力学分析,包括:将所述三维模型进行分组;基于运动特性分析的结果,进行顺序动作仿真;输入臂架系统的外部负载,提取所述三维模型各关节点的受力曲线图,得到多刚体动力学分析结果。
11.可选的,对所述三维模型进行预处理,并划分有限元网格,包括:对所述三维模型进行局部细节处理,包括但不限于删掉不影响计算的零件、处理剖口、圆角;利用网格划分模块对所述三维模型进行有限元网格划分。对除臂架以外的部套均不需要带入到静力学分析中,从而简化静力学计算量。
12.可选的,所述利用网格划分模块对所述三维模型进行有限元网格划分,包括:确定网格划分的风险区域,并对所述风险区域的网格进行加密处理。
13.可选的,所述对所述风险区域的网格进行加密处理,包括:采用六面体实体单元对所述风险区域的厚度方向填充至少三层网格。
14.可选的,所述基于所述多刚体动力学分析的结果,确定边界条件,得到所述臂架系统的有限元模型,包括:基于所述多刚体动力学分析结果,确定各关节的载荷;对滑块与臂架采用摩擦接触,并将所述关节的载荷加载到铰点处;集合臂架系统的自重,得到所述臂架系统的有限元模型。
15.可选的,所述对滑块与臂架采用摩擦接触,包括:对基本臂头部滑块与二节臂臂筒进行摩擦接触、二节臂尾部滑块与基本臂臂筒进行摩擦接触、二节臂头部滑块与三节臂臂筒进行摩擦接触、三节臂尾部滑块与二节臂臂筒进行摩擦接触。
16.可选的,将所述关节的载荷加载到铰点处,包括:
对俯仰油缸的两个铰点采用固定约束。
17.可选的,对所述有限元模型求解计算,得到臂架系统的分析结果之后,还包括:对分析结果显示不符合要求的元素,进行设计修改和结构优化。
18.本发明提供一种隧道装备臂架系统的分析方法,通过建立臂架系统的三维模型,并对三维模型进行运动特性分析;基于运动特性分析的结果,对三维模型进行多刚体动力学分析;对三维模型进行预处理,并划分有限元网格;基于多刚体动力学分析的结果,确定边界条件,得到臂架系统的有限元模型;对有限元模型求解计算,得到臂架系统的分析结果。通过本发明的分析方法能够更准确的模拟隧道装备臂架系统在工作时,臂架系统的运动特性,确保臂架系统不会发生干涉及其工作范围是否满足设计需求,并在进行多刚体动力学顺序动作仿真过程中,可以提取油缸的轴向力、各个铰点的关节力,以此来指导除臂架以外的部套设计,如:油缸、销轴等,且在静力学分析时,除臂架以外的模型都不需带入到分析中,有便于减少静力学计算量,降低有限元分析的时间,缩短产品开发周期,相比传统的分析方式,在确保安全的前提下,降低安全系数,简化并最大程度优化臂架系统的结构,降低臂架系统的设计和制造成本。
附图说明
19.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图做简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。
20.图1是本技术一实施例提供的一种隧道装备臂架系统的分析方法的步骤示意图;图2是本技术一实施例提供的臂架系统运动特性分析的坐标系示意图;图3是本技术一实施例提供的刚体复合变换示意图;图4是本技术一实施例提供的d-h连杆坐标系示意图;图5是本技术一实施例提供的臂架的工作机构整体的转换坐标系示意图;图6是本技术一实施例提供的一种臂架总成结构示意图;图7是本技术一实施例提供的三节伸缩臂关节示意图;图8是本技术一实施例提供的c1关节力随时间变化曲线示意图;图9是本技术一实施例提供的c1力矩随时间变化曲线示意图;图10是本技术一实施例提供的 c2关节力随时间变化曲线示意图;图11是本技术一实施例提供的 c2力矩随时间变化曲线示意图;图12是本技术一实施例提供的 c3关节力随时间变化曲线示意图;图13是本技术一实施例提供的c3力矩随时间变化曲线示意图;图14是本技术一实施例提供的 c4关节力随时间变化曲线示意图;图15是本技术一实施例提供的 c4力矩随时间变化曲线示意图;图16是本技术一实施例提供的 c5关节力随时间变化曲线示意图;图17是本技术一实施例提供的 c5力矩随时间变化曲线示意图;图18是本技术一实施例提供的 c6关节力随时间变化曲线示意图;图19是本技术一实施例提供的 c6力矩随时间变化曲线示意图;
图20是本技术一实施例提供的一种隧道装备臂架系统的分析方法的流程示意图。
具体实施方式
21.为了使本领域技术人员更好的理解本发明实施例,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.参照图1,是本技术一实施例提供的一种隧道装备臂架系统的分析方法的步骤示意图。
23.s11、建立臂架系统的三维模型,并对三维模型进行运动特性分析。
24.运动学分析主要针对各结构杆件的位置、速度和加速度等运动学参数进行研究,将臂架工作机构整体作为由一系列杆是通过串联连接多个旋转关节(rotary joint)或移动接头(prismatic joint),形成开环链空间连杆机构,开环链的一端由底座固定,末端部件作为执行器的可以挠变在一定的空间范围内自由运动,中间由工作臂杆件通过转动关节和移动关节串联而成,关节的相对运动导致杆件运动,臂架工作机构的运动学分析目的在于有效建立各工作杆件及杆件与末端部件之间的位置姿态关系,求解出臂架系统的工作范围,分析机构运动特性。
25.具体的,如图2所示,是臂架系统运动特性分析的参考坐标系和杆件坐标系示意图,其中{a}为参考坐标系,{b}为杆件坐标系。坐标系{b}的xb、yb、zb轴的单位主矢量相对于坐标系{a}的方向余弦组成的3
×
3的矩阵抓表示即可表达b杆在坐标系{a}中的方位,表达式为:,此矩阵也称为b杆在坐标系{a}中的旋转矩阵(方位矩阵)。方位矩阵的每列分量分别对应坐标系{b}的x、y、z轴的单位主矢量相对于坐标系{a}的方向余弦。
[0026]4×
4的齐次矩阵表示坐标系的位置姿态:,其中,列向量中三个元素分别对应、、分别对应坐标系{b}的原点o在坐标系{a}中沿x、y、z三向的分量。
[0027]
进一步的,如图3所示的刚体复合变换示意图,以矢量描述坐标系{b}原点在坐标系{a}中的位置,而坐标系{b}相对坐标系{a}的旋转矩阵已知为,则可认为坐标系{b}是坐标系{a}先沿平移至点,再旋转变换而得到。下图存在一点p,其在坐标系
{b}中的位置以矢量描述,对应该点在坐标系{a}中的位置矢量以描述。
[0028]
其中,齐次向量,转换为四维列向量,其中,那么,。
[0029]
本实施例主要以正向运动学对臂架系统进行验证,推导建立并验证机构的运动学方程,对工作空间进行求解并对运动特性进行分析。顺序运动学是已知各杆件的结构参数以及关节变量,求解末端执行器所能达到的位置和姿态。
[0030]
对于具有n个关节的系统,如果各个关节有且仅有一个自由度(旋转或移动),可将此系统视为n个连杆串联而成的开放链,以固定于底座的连杆作为链的始端,末端执行器与末端连杆连接,为准确描述各连杆位置,将各自固定一个坐标系至各个连杆。其中,点位置矢量为,末端连杆上的坐标系相对于基础坐标系的总坐标转换矩阵为:,末端执行器相对于基础坐标系空间坐标:。
[0031]
本实施例对臂架系统的运动学问题采用d-h方法进行,如图4所示,为d-h连杆坐标系的示意图,具体参数定义为:(1)参数名称:连杆长度ai,其参数定义为沿轴,从移动到的距离;(2)参数名称:连杆转角αi,其参数定义为绕轴,从旋转到的角度;(3)参数名称:连杆偏距di,其参数定义为沿轴,从移动到的距离;(4)参数名称:关节转角θi,其参数定义为绕轴,从旋转到的角度。
[0032]
根据d-h参数确定转换矩阵:,其中,;矩阵计算表达式为:。
[0033]
根据臂架系统结构示意图,d-h方法,对系统内的各个工作臂建立相对应的杆件坐标系,最终得到系统内整体的转换坐标系(如图5所示),代入d-h参数依据原理建立各级齐次变换矩阵,具体涉及10个相邻杆件转换描述对应矩阵为:
、、、、、、、、、。
[0034]
进一步的,对于末端组件相对于基础坐标系的位置关系,即系统始末端总体齐次变换矩阵表达式为:,将上式进一步展开可以得到末端组件坐标系与基座基础坐标系的位置描述矩阵:,位置描述矩阵[nx,ny,nz]t所组成的向量即表示末端组件坐标系x轴在基础坐标系的旋转向量表示。同理[ox ,oy,oz]t与[ax,ay,az]t所组成的向量分别表示为末端组件坐标系y轴和z轴在基础坐标系额旋转向量表示,[px,py,pz]t则表示末端组件相对于基础坐标系的平移向量表示。
[0035]
为验证建立的臂架系统的运动学方程是否正确,选取臂架系统在某些特殊位置下的状态,将其量化,并通过图解法得到各个关节的旋转量或平移量,并计算出此姿态下,末端部件相对于基础坐标系的向量表达,再与运动学方程计算值相比较,求解出臂架系统的工作范围,分析机构运动特性,并提供工作机构运动控制的理论基础,以及确保臂架系统不会发生干涉及其工作范围是否满足设计需求,从而确定运动学仿真建立的正确性,并为多刚体动力学研究提供基础理论依据,从而确定多刚体运动学仿真建立的正确性。
[0036]
s12、基于运动特性分析的结果,对三维模型进行多刚体动力学分析。
[0037]
首先将三维模型导入为有限元分析软件(ansys dm)可识别的格式,并利用该软件将模型依次分组,再导入ansys软件的rigid dynamics(刚体动力学分析模块)进行多刚体动力学分析。
[0038]
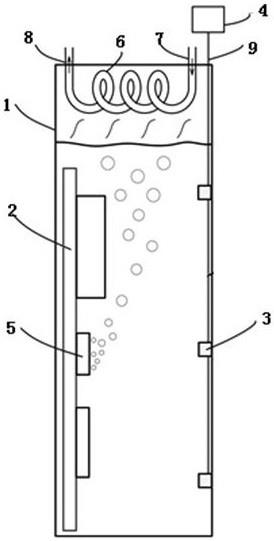
具体的,本实施例以隧道装备的臂架系统为例,如图6所示,其臂架结构总成包括:
转台1、基本节臂2、二节臂总成3、三节臂总成4、抓手总成5、吊篮总成6。油缸总成包括:主俯仰油缸7、一二节臂伸缩油缸8、二三节臂伸缩油缸9、平衡油缸10、抓手俯仰油缸11。
[0039]
本实施例涉及的部套为三节伸缩臂,所有的液压油缸将从初始未伸出状态开始,驱动函数的建立将通过ansys rigid dynamics中的step函数建立。
[0040]
整个臂架的关节驱动均由液压缸驱动,如图7所示,分为c1-c6关节,各缸运动速度均较缓慢,在油缸运动期间,均可视为匀速运动。因此将各个液压缸的位置量通过step函数进行驱动设置,驱动类型选为“displacement(位移驱动)”。机械手抓手抓取1500kg重量的三榀预制式拱架。根据驱动设置表完成各个主动油缸的驱动设置,并设定整体仿真分为6个步骤,步骤1:主俯仰油缸从初始状态伸出直到臂架水平,步骤2:一二节臂伸缩油缸从初始状态直到全部伸出,步骤3:二三节臂伸缩油缸从初始状态直到全部伸出,步骤4:抓手从初始状态通过抓手俯仰油缸回缩至地面抓起三榀预制式拱架,步骤5:抓手抓起三榀预制式拱架,抓手俯仰油缸伸出直到拱架与隧道掌子面垂直,步骤6:主俯仰油缸伸出使臂架从水平直到俯仰至合适角度,在主俯仰油缸抬升过程中吊篮需要和地面保存平行,顺序动作步长取为0.1s,从而得到各个关节受力与时间关系曲线图,各关节力矩与时间关系曲线图,如图8、图9所示的c1关节力和力矩随时间的变化曲线;图10、图11所示的c2关节力和力矩随时间的变化曲线;图12、图13所示的c3关节力和力矩随时间的变化曲线;图14、图15所示的c4关节力和力矩随时间的变化曲线;图16、图17所示的c5关节力和力矩随时间的变化曲线;图18、图19所示的c6关节力和力矩随时间的变化曲线,其中,x表示空间坐标系中x方向的关节力或力矩,y表示空间坐标系中y方向的关节力或力矩,z表示空间坐标系中z方向的关节力或力矩,k表示x、y、z三个方向的合力。
[0041]
臂架的动作驱动设置具体为:步骤1:动作油缸为主俯仰油缸,开始时间设置为0,结束时间设置为10s,动作设置为伸长222mm,其step函数设置为step(1,0,10,222);步骤2:动作油缸为主俯仰油缸,开始时间设置为50s,结束时间设置为60s,动作设置为伸长628mm, 其step函数设置为step(6,50,60,628);步骤3:动作油缸为一二节臂伸缩油缸,开始时间设置为10s,结束时间设置为20s, 动作设置为伸长2350mm, 其step函数设置为step(2,10,20,2350);步骤4: 动作油缸为二三节臂伸缩油缸, 开始时间设置为20s,结束时间设置为30s, 动作设置为伸长2350mm, 其step函数设置为step(3,20,30,2350);步骤5: 动作油缸为抓手俯仰油缸, 开始时间设置为30s,结束时间设置为40s, 动作设置为回缩330mm, 其step函数设置为step(4,30,40,-330);步骤6: 动作油缸为抓手俯仰油缸, 开始时间设置为40s,结束时间设置为50s, 动作设置为回缩330mm, 其step函数设置为step(5,40,50,330)。
[0042]
根据臂架系统的顺序动作得到的关节力和力矩,可以得到在30-60s也就是臂架水平全伸时,臂架系统的各关节点受力发生明显改变,故选取30-60s顺序动作内臂架系统c1-c6关节的力和力矩作为非线性静力学分析的输入条件。
[0043]
s13、对三维模型进行预处理,并划分有限元网格。
[0044]
利用ansys spaceclaim软件对模型进行局部细节处理,比如删掉不影响计算的零件,处理剖口,及圆角等小特征,为有限元网格划分做充足准备,然后利用ansys workbench
软件中的meshing模块划分臂架有限元网格。
[0045]
需要说明的是,在进行有限元网格划分之前,还需要预估可能存在的风险区域,风险区域一般在摩擦接触,结构突变,加强筋等处,本实施例中网格划分采用六面体实体单元网格,对于风险区域的网格需要进行网格加密处理,在厚度方向需填充三层以上,以满足分析需求。
[0046]
s14、基于多刚体动力学分析的结果,确定边界条件,得到臂架系统的有限元模型。
[0047]
对滑块与臂架采用摩擦接触,具体为基本臂头部滑块与二节臂臂筒进行摩擦接触,二节臂尾部滑块与基本臂臂筒进行摩擦接触,二节臂头部滑块与三节臂臂筒进行摩擦接触,三节臂尾部滑块与二节臂臂筒进行摩擦接触,再将多刚体动力学得到的关节载荷,加载到各关节点处,对俯仰油缸的两个铰接点采用固定约束,作为臂架的边界条件。
[0048]
此时,在对三维模型进行了预处理、网格划分、边界条件施加后,得到了臂架系统的有限元模型。
[0049]
s15、对有限元模型求解计算,得到臂架系统的分析结果。
[0050]
将得到的有限元模型,通过ansys apdl进行求解,得到臂架的静态强度、变形,臂架接触面特性结果。
[0051]
需要说明的是,在得到臂架系统的分析结果之后,如其中某项不符合要求,则需分析造成该结果的主要影响因素,并采取相应的优化措施,对不满足设计要求的,需对结构进行合理优化所述对结构进行优化,对于静态强度或变形大小不满足要求设计要求时,通过增加加强板或增大臂架截面等方式,优化结构强度使其满足设计需求,直到满足技术要求为止。
[0052]
可以理解的是,本实施例通过各种有限元软件进行相关建模、处理、网格划分、求解计算、分析等方式并不特指实施例提出的某一种方式方法,所有可以实现本技术相关操作的方式方法均处于本技术的保护范围之内。
[0053]
本实施例提供一种隧道装备臂架系统的分析方法,通过建立臂架系统的三维模型,并对三维模型进行运动特性分析;基于运动特性分析的结果,对三维模型进行多刚体动力学分析;对三维模型进行预处理,并划分有限元网格;基于多刚体动力学分析的结果,确定边界条件,得到臂架系统的有限元模型;对有限元模型求解计算,得到臂架系统的分析结果。通过本实施例的分析方法能够更准确的模拟隧道装备臂架系统在工作时,臂架系统的运动特性,确保臂架系统不会发生干涉及其运动的合理性是否满足设计需求,并在进行多刚体动力学顺序动作仿真过程中,可以提取油缸的轴向力、各个铰点的关节力,以此来指导除臂架以外的部套设计,如:油缸、销轴等,且在静力学分析时,除臂架以外的模型都不需带入到分析中,有便于减少静力学计算量,降低有限元分析的时间,缩短产品开发周期,相比传统的分析方式,在确保安全的前提下,降低安全系数,简化并最大程度优化臂架系统的结构,降低臂架系统的设计和制造成本。
[0054]
为更好的理解本技术所提出的一种隧道装备臂架系统的分析方法,如图20所示,为本技术一实施例的流程示意图。
[0055]
具体为,步骤一:建立几何模型;步骤二:对几何模型进行运动特性分析,并确定是否符合设计要求,若不满足则进
行设计修改、优化结构,回到步骤一,若满足则进行步骤三;步骤三:对几何模型进行多刚体动力学分析;步骤四:确定边界条件,建立有限元模型;步骤五:进行非线性静力学分析;步骤六:根据分析结果,首先确定是否满足静态强度、变形的要求,若不满足,则行设计修改、优化结构,回到步骤一,若满足则进行步骤七;步骤七:根据分析结果,确定强度理论是否满足要求,若不满足,则行设计修改、优化结构,回到步骤一,若满足则进行步骤八;步骤八:根据分析结果,确定安全系数是否满足要求,若不满足,则行设计修改、优化结构,回到步骤一,若满足则分析完成。
[0056]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0057]
以上仅是本发明的优选实施方式,应当指出的是,上述优选实施方式不应视为对本发明的限制,本发明的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本发明的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。