1.本发明涉及喷墨头的驱动控制方法以及喷墨记录装置。
背景技术:
2.在从喷嘴排出墨液滴而在介质上形成所希望的图像、结构、薄膜等的喷墨记录装置中,存在如下技术:通过使连续地排出的多个墨液滴在中途合一或者分别喷落在同一像素范围内,从而使各像素范围的浓度灰度变化。在喷墨记录装置中,在各喷嘴间存在墨排出特性所涉及的偏差。特别是,在使多个墨液滴持续排出的情况下,由于之前的排出动作的影响容易波及到之后的排出动作,因此,偏差大且容易变得复杂。
3.为了降低该偏差的影响,存在针对每个驱动元件而分别调整使对喷嘴内的墨赋予压力变动的驱动元件驱动的电信号(驱动脉冲)的技术。在专利文献1中,还公开了通过对各驱动元件的驱动脉冲中的驱动波形的下降定时进行调整,从而使墨的液滴量与喷落定时一致的技术。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2017-226201号公报
技术实现要素:
7.发明要解决的课题
8.但是,以往,墨排出特性存在基准以上的偏差的喷墨头作为非标准品被处理。根据喷嘴数的增大、对墨排出特性的要求的提高,存在喷墨头的成品率降低、导致成本增大等的课题。
9.本发明的目的在于提供一种喷墨头的驱动控制方法以及喷墨记录装置,能够得到更广泛地降低排出特性的偏差而能够利用的喷墨头。
10.用于解决课题的方案
11.为了实现上述目的,技术方案1所述的发明为,
12.一种喷墨头的驱动控制方法,所述喷墨头具备多个记录元件,所述记录元件包括排出墨的喷嘴和根据所施加的驱动脉冲而对向所述喷嘴供给的墨赋予压力变动的驱动元件,其中,
13.根据施加于所述驱动元件的驱动脉冲而由所述记录元件的每一个排出的墨液滴所涉及的规定的特性值相对于所述驱动脉冲的脉冲宽度的变化而成为极大的所述驱动脉冲的基准脉冲宽度具有规定的基准以上的偏差,
14.所述喷墨头的驱动控制方法包括脉冲宽度设定步骤,在所述脉冲宽度设定步骤中,在使根据2个以上的规定数量的所述驱动脉冲而分别被排出的该规定数量的墨液滴喷落在同一像素范围内的情况下,针对所述多个记录元件的每一个,将脉冲宽度比所述基准脉冲宽度长的第一驱动脉冲和脉冲宽度比所述基准脉冲宽度短的第二驱动脉冲组合所述
规定数量个,并向所述多个记录元件的每一个输出。
15.另外,技术方案2所述的发明在技术方案1所述的驱动控制方法中,
16.在所述脉冲宽度设定步骤中,确定脉冲宽度比所述多个记录元件各自所涉及的所述基准脉冲宽度的任一个都长的所述第一驱动脉冲和脉冲宽度比所述基准脉冲宽度的任一个都短的所述第二驱动脉冲。
17.另外,技术方案3所述的发明在技术方案2所述的驱动控制方法中,
18.在所述脉冲宽度设定步骤中,所述第一驱动脉冲的脉冲宽度和所述第二驱动脉冲的脉冲宽度针对所述多个记录元件被共同确定。
19.另外,技术方案4所述的发明在技术方案1~3中任一项所述的驱动控制方法中,
20.在所述脉冲宽度设定步骤中,所述第一驱动脉冲和所述第二驱动脉冲的顺序被确定为,更接近与所述多个记录元件所涉及的所述极大的所述特性值中的最小的特性值相应的所述基准脉冲宽度的脉冲宽度成为最后的驱动脉冲。
21.另外,技术方案5所述的发明在技术方案1~4中任一项所述的驱动控制方法中,所述规定的特性值是被排出的墨的液滴速度。
22.另外,技术方案6所述的发明在技术方案1~4中任一项所述的驱动控制方法中,所述规定的特性值是被排出的墨的液滴量。
23.另外,技术方案7所述的发明在技术方案1~6中任一项所述的驱动控制方法中,所述偏差所涉及的所述规定的基准为3%。
24.另外,技术方案8所述的发明在技术方案1~7中任一项所述的驱动控制方法中,
25.所述规定数量是偶数,
26.在所述脉冲宽度设定步骤中,确定为交替地输出所述第一驱动脉冲和所述第二驱动脉冲。
27.另外,技术方案9所述的发明如下:
28.一种喷墨记录装置,其中,所述喷墨记录装置具备:
29.喷墨头,所述喷墨头具有多个记录元件,所述记录元件包括排出墨的喷嘴和根据所施加的驱动脉冲而对向所述喷嘴供给的墨赋予压力变动的驱动元件;以及
30.控制部,所述控制部控制对所述驱动元件施加的所述驱动脉冲向所述记录元件的输出,
31.根据施加于所述驱动元件的驱动脉冲而由所述记录元件的每一个排出的墨液滴所涉及的规定的特性值相对于所述驱动脉冲的脉冲宽度的变化而成为极大的所述驱动脉冲的基准脉冲宽度具有规定的基准以上的偏差,
32.在使根据2个以上的规定数量的所述驱动脉冲而分别被排出的该规定数量的墨液滴喷落在同一像素范围内的情况下,所述控制部针对所述多个记录元件的每一个,将脉冲宽度比所述基准脉冲宽度长的第一驱动脉冲和脉冲宽度比所述基准脉冲宽度短的第二驱动脉冲组合所述规定数量个,并向所述多个记录元件的每一个输出。
33.根据施加于所述驱动元件的驱动脉冲而由所述记录元件的每一个排出的墨液滴所涉及的规定的特性值相对于所述驱动脉冲的脉冲宽度的变化而成为极大的所述驱动脉冲的基准脉冲宽度具有规定的基准以上的偏差,发明的效果
34.根据本发明,具有能够更容易地降低喷嘴间的排出特性的偏差的效果。
semiconductor:互补金属氧化物半导体)摄像元件在宽度方向上排列的线传感器,与介质m向输送方向的移动组合而能够进行介质m上的二维拍摄。
58.图2是表示头单元21的与输送带12相向的面(底面)的仰视图。需要说明的是,由于头单元21c、21m、21y、21k具有相同的结构,因此,在此对任一个进行说明。
59.头单元21固定于滑架210。在头单元21的底面,头单元21分别具有的16个喷墨头211的喷嘴面露出。在喷嘴面上分别排列有多个喷嘴的开口27a。开口27a在宽度方向上以规定的间隔(喷嘴间距)排列,并使被排出的墨喷落在被输送的介质m上的宽度方向上的各位置。
60.图3是表示喷墨记录装置1的功能结构的框图。
61.喷墨记录装置1除了具备上述的输送部10、记录动作部20、控制部40以及拍摄部50以外,还具备驱动波形信号生成部29、存储部30、通信部70、操作受理部81、显示部82以及电力供给部90等。
62.输送部10如上所述具备输送电机14,通过向该输送电机14输出适当的驱动信号而使输送电机14进行旋转动作。
63.记录动作部20具备头驱动部25和压电元件26(驱动元件)等。头驱动部25对所选择的压电元件26施加驱动信号(驱动脉冲)而使压电元件26进行变形动作。由此,压电元件26对被供给到喷嘴27的墨施加与驱动脉冲相应的压力变动并使其从喷嘴27射出,从而记录图像。由压电元件26和喷嘴27构成本实施方式的记录元件200。记录动作部20具有与喷嘴27的数量相应的多个记录元件200。
64.驱动波形信号生成部29生成头驱动部25向记录元件200输出的驱动脉冲。驱动波形信号生成部29虽然没有特别限定,但对表示预先确定的驱动波形的数字数据进行模拟转换,并将对电压以及电流进行放大后的信号作为驱动脉冲输出到头驱动部25。
65.控制部40具备cpu41(central processing unit:中央处理单元)和ram42(random access memory:随机存取存储器),是综合控制喷墨记录装置1的各种动作的处理器。cpu41进行各种运算处理来执行控制动作。ram42向cpu41提供作业用的存储空间,临时存储数据。控制部40基于记录对象的图像数据、图像的记录所涉及的设定数据等,控制喷墨头211中的墨排出动作所涉及的驱动脉冲向记录元件200的输出。
66.存储部30存储记录对象的图像数据,并且存储各种程序、设定数据。存储部30至少具有非易失性存储器,也可以具有易失性存储器(ram)。图像数据也可以存储于ram。在设定数据中包含al(acoustic length:声学长度)测量数据31和波形设定数据32。非易失性存储器例如是闪存等,也可以在此基础上或取而代之地具有hdd(hard disk drive:硬盘驱动器)等。
67.al测量数据31存储各喷嘴27内(包括与喷嘴27连通的墨流路)的墨所涉及的实际的al(基准脉冲宽度)的测量值。al是在喷嘴27内的墨(流体)产生的压力振动的共振周期(声音共振周期)的一半。该al依赖于喷嘴27等的结构、即长度、宽度等。另外,由于喷嘴以及墨流路在更上游与共用的墨供给路连通,因此,有时会从理论上正确的值稍微偏移。并且,在制造上结构具有微小的偏差,al也根据该偏差而稍微产生偏差。al测量数据31也可以不包含所有的喷嘴27的al,只要存储以规定的间隔等进行采样取得、另外根据需要局部地缩小间隔而取得的al即可。
68.波形设定数据32存储向各记录元件200输出的驱动脉冲的波形图案数据。在此存储的波形图案数据特别包含连续地进行多次墨排出的情况下的与各墨排出分别相应的驱动脉冲的开始定时、脉冲宽度以及电压振幅的信息。这些可以是成为由驱动波形信号生成部29生成的驱动脉冲的基础的数字数据。
69.通信部70执行控制与外部设备之间的通信。通信部70例如能够基于tcp/ip等通信标准与外部的计算机连接,取得包含记录对象的图像数据在内的作业数据,另外,输出基于作业数据的图像记录动作的状态。另外,通信部70也可以通过usb(universal serial bus:通用串行总线)等与周边设备直接连接来进行数据的收发。
70.操作受理部81受理用户等的输入操作,将受理的内容作为输入信号输出到控制部40。操作受理部81例如具备触摸面板、按钮开关等。触摸面板也可以位于与显示部82的显示画面重叠的位置,与向显示画面的显示内容同步地确定操作内容。
71.显示部82对用户等进行表示状态、选择菜单等的显示。显示部82例如具有显示画面和指示器(灯)等。显示部82例如具有液晶显示器等,能够在显示画面上点阵显示各种文字、图形。指示器例如也可以在通过led灯等表示电力供给的有无、动作异常的有无等的情况下利用。
72.电力供给部90供给与喷墨记录装置1的各部分相应的电压的电力。向记录动作部20的驱动基板212输出与各驱动波形的峰值电压相应的电压。或者,也可以仅输出最大峰值电压,在驱动基板212中生成多个电压信号。
73.除了上述各结构以外,喷墨记录装置1也可以具有测量来自各喷嘴27的墨的排出速度的测量部。或者,也可以具有相对于喷墨记录装置1以外设的方式安装并测定来自各喷嘴27的墨排出速度的测量装置的安装部。需要说明的是,排出速度也可以不直接测量墨的飞行速度,而基于拍摄部50的拍摄数据根据喷落位置来确定。
74.接着,对本实施方式的喷墨记录装置1中的墨排出动作所涉及的驱动设定进行说明。
75.图4a以及图4b是对排出脉冲进行说明的图。
76.如图4a所示,在此,通过对压电元件26施加梯形波(或矩形波)的驱动脉冲而使向喷嘴27供给的墨在喷嘴27跟前的墨流路(墨室)中临时压缩或膨胀、之后返回的动作,对墨赋予压力变动,从而进行墨排出动作。需要说明的是,在此为了便于说明,以容易理解的长度表示梯形波的电压从初始电压的上升以及向初始电压的下降,但与驱动电压的维持期间相比的上升时间以及下降时间也可以适当地确定。
77.来自喷嘴27的墨排出在先压缩墨的推压的情况下,压缩墨流路而从开口27a挤出的墨与通过墨流路的容积复原的动作而被拉回的墨流路内的墨分离,从而飞行。在先使墨膨胀的拉动的情况下,扩张墨流路而从喷嘴27的开口27a向流路的里侧拉回的墨通过墨流路的容积复原的动作而猛烈地向喷嘴27的开口27a的方向返回,由此,前端部分的墨的一部分从开口27a飞出而分离并飞行。
78.在该压力变动中,在墨中,与上述的al相应的周期的振动成分变大。通过施加脉冲宽度(在此,将梯形驱动波中的驱动脉冲的从上升开始到下降开始的时间设为脉冲宽度pw)为al的驱动脉冲,能够从驱动脉冲高效地得到墨的动能。
79.如图4b所示,根据所施加的脉冲宽度,特别是,脉冲宽度从喷嘴27所涉及的实际的
al越大幅偏移,则排出速度(特性值)越降低(变化)。排出速度相对于脉冲宽度从实际的al偏移的偏移量,例如可以用2次曲线~3次曲线(或更高次的函数)近似。根据多个喷嘴27间的al的偏移(在此,以粗线和细线例示两种),在近似曲线的位置也产生偏移。通常,如果规定的代表值pw0下的墨的排出速度在喷嘴27间不产生基准以上的偏移,则能够利用具有该喷嘴27的喷墨头211。作为代表值pw0,例如选择在喷嘴27的排列中位于中央的喷嘴的al。
80.图5a以及图5b是表示连续多次排出墨的情况下的驱动波形的例子的图。
81.如图5a所示,在喷墨记录装置1中,通过使连续多次(2以上的规定数量)排出的墨(多滴的墨)在飞行中合一,或使其分别喷落在介质m上的规定的像素范围内,从而多阶段地确定各像素范围的墨浓度(灰度)。在脉冲宽度pw1与al相等的情况下,当以其2倍的排出周期pe1进行多次排出动作时,在第二次以后的排出时,由于之前的排出动作所涉及的墨的振幅的回响而使得振动被放大(共振),从而排出速度上升。另一方面,在脉冲宽度pw1与al不相等的情况下,或排出周期pe1不是脉冲宽度pw1或al的2倍的情况下,也存在如下情况:第二次以后的排出速度不上升,进而振动减弱而排出速度降低。即,与单次排出的情况相比,在多次的连续排出中,能够根据所设定的脉冲宽度与各喷嘴的实际的al之间的关系而增大排出速度的偏差。
82.在本实施方式的喷墨记录装置1中,例如,也能够利用墨的液滴速度(墨液滴所涉及的规定的特性值)相对于脉冲宽度的变化而取极大值的基准脉冲宽度(实际的al)的偏差、即实际的al下的墨的液滴速度(墨液滴所涉及的规定的特性值)大到在图像品质上无法忽视的程度(与图像品质相应的规定的基准以上)的情况下的喷墨头211。另外,也可以简便地使用脉冲宽度为上述代表值pw0(中央的喷嘴的al)的驱动脉冲下的液滴排出速度增大规定的基准以上的情况这样的基准。在喷墨记录装置1中,在对同一像素范围连续多次(特别是偶数次)排出、喷落的情况下(也包括在中途合一的情况),如图5b所示,使第一次的脉冲宽度pw1与第二次的脉冲宽度pw2不同。由排出速度的偏差引起的图像品质上的问题例如表现为墨的喷落位置的偏移、由墨速度过低引起的墨液滴的飞行的不稳定性以及喷落时的墨向介质m的浸透、扩散以及定影情况的偏差等。由于墨的喷落位置的偏移量也依赖于飞行中的介质m的移动速度(输送速度)等,因此,规定的基准并不一律被确定,但例如也可以基于能够由喷墨记录装置1执行的最大的介质m的移动速度而被确定。作为这样的喷落位置(液滴速度)的偏移量的基准,在当前的喷墨记录装置1中,例如可以确定为3%等。另外,在根据连续的排出的次数、输送速度等(统一为动作状况)而可能混合存在满足规定的基准的情况和不满足规定的基准的情况的情况下,在至少任一个条件下不满足规定的基准的情况下,喷墨头211可以确定为无论动作状况如何都一律进行使第一次的脉冲宽度pw1与第二次的脉冲宽度pw2不同的控制。即,不需要根据动作状况来切换各个驱动脉冲的设定。
83.如上所述,在所施加的驱动脉冲的脉冲宽度存在从实际的al大幅偏移的脉冲宽度的情况下,在先的排出所涉及的振动容易减弱下一次的排出所涉及的振动,在该情况下,排出速度显著降低。如果后发的排出墨比先发的排出墨慢,则可能产生应该合一的墨液滴在飞行中不合一的情况。另外,在速度差过大的情况下,不仅墨的喷落位置的偏移,墨液滴的形状、喷落时的形态也可能产生问题(即,可能使图像品质等劣化),因此,多个墨液滴需要在适当的速度范围内。
84.在本实施方式的喷墨记录装置1中,组合接着进行的2次驱动脉冲来进行脉冲宽度
等的设定。在此,2次驱动脉冲中的一方设为比调整对象的一个头单元21中的所有的喷嘴的al(包括排出墨的喷嘴自身的al)长的脉冲宽度pw1的驱动脉冲(第一驱动脉冲),另一方设为比该头单元21中的所有的喷嘴的al(包括排出墨的喷嘴自身的al)短的脉冲宽度pw2的驱动脉冲(第二驱动脉冲)。即,所有的驱动脉冲不设定为比任意的喷嘴所涉及的al相同程度的长度。另一方面,通过使2次的长度长短不同,不会产生被供给与al的长度之差小的2次脉冲的喷嘴和被供给与al的长度之差大的2次脉冲的喷嘴。该驱动脉冲的组合可以作为所有的喷嘴所涉及的驱动脉冲而被共同确定。
85.图6a以及图6b是表示喷墨头211中的多个喷嘴(在此为100喷嘴量)的排出速度的分布的例子的图。以下,排出速度表示多次连续排出的墨液滴合一后的速度,但在基于拍摄部50的拍摄结果来计算速度的情况下,也可以求出从任一个墨液滴(例如,最后发)的排出定时到喷落于介质m为止的平均速度。
86.如图6a的线lk1所示,在固定为某脉冲宽度pwm(例如,比代表值pw0短8.6%)而进行了一个像素量的排出动作(在此为2次排出)的情况下,在喷嘴编号为55以后的喷嘴中排出速度(多个液滴合一后)大,在喷嘴编号为45以前的喷嘴中排出速度小。另一方面,如线lk2所示,在固定为某脉冲宽度pwp(》pwm,例如比代表值pw0长8.6%)而进行了同样的排出动作的情况下,在喷嘴编号为45以前的喷嘴中,与脉冲宽度pwm的情况相比排出速度大,在喷嘴编号为55以后的喷嘴中,与脉冲宽度pwm的情况相比排出速度低。即,推测为,对于喷嘴编号为45以前的喷嘴,al接近脉冲宽度pwp,对于喷嘴编号55以后的喷嘴,al接近脉冲宽度pwm。
87.线lj1、lj2分别表示在2次排出动作中的第一次设为比脉冲宽度pwm足够短的脉冲宽度pw1、在第二次设为比脉冲宽度pwp足够长的脉冲宽度pw2的情况下的各喷嘴的排出速度。在此所说的足够是指,分别比所有的喷嘴的al越短则越短,以及比所有的喷嘴的a越长则越长。如果喷嘴没有明确的异常,则即使不一定实际测量、取得所有的喷嘴的al,al的偏差的范围也能够基于一部分的测量结果和制造上的特性而大致设想。因此,只要在比设想的范围的偏差更大的范围(在此,为代表值pw0的
±
15.2%)确定脉冲宽度pw1、pw2即可。脉冲宽度满足pwm pwp=pw1 pw2的关系。另外,在线lj1上,排出周期为脉冲宽度pwm的2倍,在线lj2上,排出周期为脉冲宽度pwp的2倍。在任何情况下,与固定脉冲宽度的情况相比,排出速度的偏差都比各喷嘴的al的偏差小。
88.虽然没有特别限定,但例如排出周期pe1为脉冲宽度pw2的2倍以下,为脉冲宽度pw1的2倍以上。排出周期pe1例如可以是全部喷嘴的平均al的2倍左右的长度,也可以是脉冲宽度pw1或脉冲宽度pw2的2倍。
89.这样的脉冲宽度的组合不限于2次排出的情况,例如也可以是4次排出的情况。在连续进行4次以上的墨排出的情况下,重复2次以上的2次驱动脉冲的设置即可。通过交替地输出长短脉冲宽度的驱动脉冲,对于具有al不同的部分的喷嘴列,整体的排出速度的偏差降低。
90.另外,不仅在对单一的像素范围进行4次以上的连续排出的情况下,在向前一个像素范围的墨排出所涉及的回响没有消失的期间开始向下一个像素范围的墨排出那样的高频排出的情况下也同样地,之前的排出所涉及的墨的振动的影响会影响到之后的排出所涉及的墨的振动,排出速度的偏差容易变大。
91.在图6(b)中,线li1、li2分别表示以脉冲宽度pwc(pwp》pwc》pwm,在此,脉冲宽度pwc比代表值pw0短5.7%)每一个像素进行了4发的墨排出的情况下的第一像素和第十像素的墨排出速度的量。各像素(像素范围)的记录周期为排出周期的约5.22倍。在该情况下,在第十像素的记录时的墨排出速度中接近al的喷嘴(喷嘴编号55以后)中,由于像素之间的波形的回响而减弱,第一像素的墨排出速度降低。即,根据连续动作的状况,排出速度产生变化。
92.线lv1、lv2分别是将脉冲宽度p1a、p2a(p1a(=0.686
×
pw0)《pwc《p2a(=1.286
×
pw0))的波形在第奇数发和第偶数发的排出中交替地切换的情况下的第一像素和第十像素的墨排出速度的分布。可知不仅第一像素中的偏差比线li1所示的偏差小,而且第十像素的排出中的墨排出速度分布与第一像素中的墨排出速度分布之差比固定为脉冲宽度pwc的情况小。这样,组合了长的脉冲宽度和短的脉冲宽度的驱动信号在连续动作时的稳定性方面也有效果。
93.需要说明的是,在相对的排出速度的偏差降低的脉冲宽度的组合中,不一定进行向效率最高的动能(排出速度)的转换。因此,通过对驱动波形的振幅(电压)进行调整,能够得到所希望的排出速度(绝对值)。
94.根据各喷嘴中的al的差值而需要从脉冲宽度的代表值pw0进行调整的情况是如上所述喷嘴间的al的偏差对图像品质造成的影响大到无法忽视的程度的情况,也可以是根据介质m的最快输送速度、最高等级的要求图像品质等,例如排出速度、墨液滴的墨量产生3%以上的偏差的情况。如上所述,脉冲宽度pw1、pw2被设定为与上述排出速度的偏差相应的al的偏差(例如10%左右)的最大值与最小值的间隔以上的间隔。由此,例如,脉冲宽度pw1、pw2可以相对于以往设定的脉冲宽度的代表值pw0增减
±
20%(整体为40%)左右,或者也可以是比其更大的增减。
95.图7a以及图7b是表示使脉冲宽度的变化量不同的情况下的排出速度分布的例子的图。
96.在图7a中,相对于以上述脉冲宽度pwc固定而对一个像素进行了4次排出动作的情况下的排出速度的分布(线lra、lrb),比较将第二次、第四次的脉冲宽度延长了约9%的情况下的排出速度的分布(线laa、lab)。在线lra、laa上,排出周期为脉冲宽度pwc的2倍,在线lrb、lab上,排出周期为第二次、第四次的脉冲宽度的2倍。在该程度的振幅差中,虽然不会成为较大的变化,但与固定脉冲宽度的情况相比,可以看到偏差稍微减少的倾向。
97.在图7b中,使第一次、第三次的脉冲宽度比脉冲宽度pwc缩短约18%,使第二次、第四次的脉冲宽度比脉冲宽度pwc延长约27%。线lba、lbb各自的情况下的排出周期与线laa、lab相同。在这些情况下,可以看到喷嘴间的排出速度的偏差更有效地降低的倾向。
98.在此,进而,在与各喷嘴分别对应的压电元件26中,存在灵敏度的偏差。
99.图8a以及图8b是对喷嘴间的灵敏度的偏差进行说明的图。
100.例如,如图8a所示,存在在脉冲宽度pwa处排出速度成为极大的喷嘴和在脉冲宽度pwb处排出速度成为极大的喷嘴,这些极大的排出速度va、vb不同。即,即使分别施加与实际的al相等的脉冲宽度的驱动脉冲,有时也无法得到相同的排出速度。
101.在图8b所示的例子中,当以脉冲宽度的代表值pw0测量从喷墨头211内的多个喷嘴排出的排出速度时,如线lt所示,在表观上喷嘴编号为0~25号以及50号之后的喷嘴,排出
速度相对变高。但是,当以比代表值pw0短的脉冲宽度pwm测量上述多个喷嘴的排出速度时,如线ls所示,可以看到如下倾向:在喷嘴编号为60以后的喷嘴中排出速度进一步上升,在喷嘴编号为50之前的喷嘴中排出速度减少。另一方面,当以比代表值pw0长的脉冲宽度pwp测量这些多个喷嘴的排出速度时,如线lu所示,在喷嘴编号55以后的喷嘴中,排出速度降低,在喷嘴编号小于50的喷嘴中,排出速度上升。即,可知喷嘴编号为55以后的喷嘴的al比代表值pw0短,喷嘴编号为50之前的喷嘴的al比ps长。但是,在喷嘴编号为25~45的喷嘴中,即使以接近al的脉冲宽度pwp被驱动,作为排出速度,也不会与喷嘴编号为50之后的喷嘴的排出速度产生较大的差。即,可知喷嘴编号为25~45的喷嘴的压电元件26的灵敏度自身较低。
102.在这种情况下,在上述2次设置的驱动脉冲中,以第二次的(最后的)驱动脉冲的脉冲宽度更接近灵敏度低的喷嘴(极大的特性值(排出速度)中的最小的特性值)的al(基准脉冲宽度)的方式确定脉冲宽度的顺序。在原本灵敏度低且速度容易变慢的情况下,通过相对地提高后发的墨的速度,使后发墨追上先发墨,从而整体上容易成为适当的喷落。
103.图9是表示包括灵敏度不同的喷嘴的情况下的与脉冲宽度的顺序相应的排出速度的分布的例子的图。喷嘴编号为50之前的喷嘴(压电元件26)的灵敏度相对较低,喷嘴编号为50之后的喷嘴(压电元件26)的灵敏度相对较高。
104.线lh表示第一次的脉冲宽度更接近喷嘴编号为50之前的喷嘴所涉及的实际的al、第二次的脉冲宽度更接近喷嘴编号为50之后的喷嘴所涉及的实际的al的情况下的排出速度与基准排出速度之差。线ll表示第一次的脉冲宽度更接近喷嘴编号为50之后的喷嘴所涉及的实际的al、第二次的脉冲宽度更接近喷嘴编号为50之后的喷嘴所涉及的实际的al的情况下的排出速度与基准排出速度之差。可知,线ll所示的排出速度之差比线lh所示的排出速度之差小。
105.接着,对本实施方式的喷墨记录装置1中的脉冲宽度设定动作进行说明。
106.如上所述,如果在头单元21内al的偏差足够小,则不需要脉冲宽度的设定,在al的偏差较大的情况下,代替废弃该头单元21而进行脉冲宽度的设定。各喷嘴27中的al偏离理论值,因此,一边使脉冲宽度偏移一边测量排出速度并进行拟合,通过该拟合而确定为与排出速度成为极大的脉冲宽度(基准脉冲宽度)相等的值。如上所述,头单元21(喷墨头211)内的al的分布可以基于规定数量的测量数据来推测。
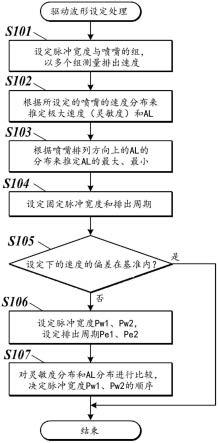
107.图10是表示由本实施方式的喷墨记录装置1执行的驱动波形设定处理的控制部40的控制步骤的流程图。该驱动波形设定处理例如在出厂前的检查时等根据检查者对操作受理部81的输入操作而起动。
108.当开始驱动波形设定处理时,控制部40(cpu41)确定进行墨排出速度的测量的对象的多个(例如3个)脉冲宽度和多个喷嘴27。控制部40设定脉冲宽度与喷嘴位置的全部组合,通过记录动作部20以所设定的喷嘴27以及脉冲宽度进行墨排出,另外,通过测量部进行墨排出速度的测量(步骤s101)。
109.控制部40针对作为墨排出速度的测量对象的各喷嘴27,拟合所得到的速度分布(如上所述,例如,基于2次曲线或3次曲线的拟合),推定最大(极大)速度和该最大(极大)速度下的脉冲宽度(基准脉冲宽度)(步骤s102)。最大(极大)速度能够转换为喷嘴27的压电元件26的灵敏度信息。基准脉冲宽度与该喷嘴27所涉及的al(实际al)相对应。
110.控制部40基于实际al在喷嘴排列方向上的分布,推定实际al的最大值以及最小值
(步骤s103)。最大值以及最小值不需要是精确的值,也可以通过较宽的间隔(增大最大值,减小最小值)来推定。为了进行该推定,控制部40也可以通过追加而取得几个喷嘴27中的上述多个脉冲宽度下的墨排出速度的测量数据。另外,控制部40也可以在最大值以及最小值的推定中使用拟合等。
111.控制部40基于推定出的各喷嘴的al,设定固定脉冲宽度和排出周期pe(步骤s104)。该固定脉冲宽度可以是以往设定的代表值pw0,但并不限于此。排出周期pe也可以是固定脉冲宽度的2倍。
112.控制部40判别所设定的固定脉冲宽度下的全部喷嘴27的墨排出速度的偏差是否收敛在规定的基准内(步骤s105)。控制部40例如计算从距固定脉冲宽度最远的al(上述al的最大值或最小值的任一方。也可以机械地选择双方)的喷嘴27排出墨的墨排出速度相对于al下的墨排出速度变慢何种程度。在判别为收敛在规定的基准内的情况下(在步骤s105中为“是”),控制部40确定所设定的固定脉冲宽度和排出周期pe,结束驱动波形设定处理。
113.在判别为未收纳在规定的基准内的情况下(在步骤s105中为“否”),控制部40基于推定出的al的最大值以及最小值,设定脉冲宽度pw1、pw2以及排出周期pe1、pe2(步骤s106)。脉冲宽度pw1、pw2例如也可以对al的最大值以及最小值的中值(平均值)乘以该值的规定倍(例如,1.2倍以及0.8倍等)而得到。排出周期pe1例如也可以是所得到的脉冲宽度pw1、pw2中的任一个的2倍。排出周期pe2例如也可以与排出周期pe1相同。
114.控制部40对喷嘴27的排列方向(宽度方向)上的灵敏度分布与al的分布进行比较。控制部40决定先输出脉冲宽度pw1、pw2中的哪一个的顺序(步骤s107)。控制部40确定全部喷嘴27中的灵敏度相对较低的范围,并取得该范围内的代表性的al的值。控制部40判别脉冲宽度pw1、pw2中的哪一个接近代表性的al,以接近的一方之后输出的方式决定排出的顺序。步骤s106、s107的处理构成本实施方式的驱动控制方法中的脉冲宽度设定步骤。然后,控制部40结束驱动波形设定处理。
115.如上所述,本实施方式的喷墨头211具备多个记录元件200,该记录元件200包括排出墨的喷嘴27和根据所施加的驱动脉冲而对向喷嘴27供给的墨赋予压力变动的压电元件26。根据对多个压电元件26的每一个施加的驱动脉冲而由记录元件200的每一个排出的墨液滴的液滴速度相对于驱动脉冲的脉冲宽度的变化成为极大的基准脉冲宽度(实际的al)具有规定的基准以上的偏差。本实施方式的这样的喷墨头211的驱动控制方法包括如下的脉冲宽度设定步骤(即,驱动波形设定处理中的步骤s106、s107的处理):在使根据2个以上的规定数量的驱动脉冲而分别被排出的该规定数量的墨液滴喷落在同一像素范围内的情况下,针对多个记录元件200的每一个,将比基准脉冲宽度(实际的al)长的脉冲宽度pw1的第一驱动脉冲和比基准脉冲宽度(实际的al)短的脉冲宽度pw2的第二驱动脉冲合计组合上述规定数量个,并向多个记录元件200的每一个输出。
116.根据这样的驱动控制方法,在连续地排出多发液滴并使其喷落在同一像素范围内的喷墨记录装置1中,即使在喷嘴27间的特性的偏差较大而在多发连续排出中该影响特别大而以往不满足喷墨头211的标准的情况下,也能够更有效地降低偏差的不良影响。因此,也能够使用以往被废弃那样的喷墨头211,能够提高制造上的成品率而削减制造成本。
117.另外,在脉冲宽度设定步骤中,确定比多个记录元件200各自所涉及的基准脉冲宽度的任一个都长的脉冲宽度pw1的第一驱动脉冲和比基准脉冲宽度的任一个都短的脉冲宽
度pw2的第二驱动脉冲。即,对于各个喷嘴,不是设定基于各个基准脉冲宽度的脉冲宽度pw1、pw2,而是对所有的喷嘴的al设定长的一侧的脉冲宽度pw1和短的一侧的脉冲宽度pw2。由此,能够使脉冲宽度pw1、pw2适度地大幅不同,能够稳定地得到各喷嘴的排出速度。
118.另外,在脉冲宽度设定步骤中,脉冲宽度pw1和脉冲宽度pw2针对多个记录元件200被共同确定。通过对所有的喷嘴27共同确定满足条件的脉冲宽度pw1、pw2,能够容易地进行脉冲宽度的设定。另外,由于无需针对每个压电元件26而变更脉冲宽度,因此,驱动动作也较为容易。
119.另外,在脉冲宽度设定步骤中,第一驱动脉冲和第二驱动脉冲的顺序被确定为,更接近与多个记录元件200所涉及的极大的墨排出速度中的最小的墨排出速度相应的基准脉冲宽度(al)的脉冲宽度成为最后的驱动脉冲。即,对于灵敏度低的压电元件26,输出接近al的驱动脉冲,以便在最后的驱动脉冲中尽可能容易得到所需的排出速度。由此,能够在不过度降低排出速度的情况下得到稳定的墨排出和相对于驱动电压的动作效率。
120.另外,规定的特性值是被排出的墨的液滴速度。由于墨的液滴速度容易对图像品质的偏差产生较大影响,因此,通过将其作为特性值而以在喷嘴27之间对齐的方式进行调整,容易降低图像品质的不均。
121.或者,规定的特性值也可以是被排出的墨的液滴量。根据记录对象图像的内容、图像的记录者的要求内容,有时整体上的墨浓度(灰度)的不均比墨的喷落位置更重要,因此,在使用液滴量作为特性值来降低图像品质的偏差的情况下,本发明也是有效的。
122.另外,特性值的偏差的允许范围所涉及的规定的基准为3%。偏差的影响也取决于介质m的输送速度、要求图像品质,但也可以基于一般要求的平均图像品质等唯一地确定适当的值。由此,能够向喷墨记录装置1的用户提供简化检查以及设定的工夫并且能够容易且稳定地得到适当的图像品质的喷墨头211。
123.另外,墨液滴向单一的像素范围的连续排出所涉及的规定数量是偶数,在脉冲宽度设定步骤中,以交替地输出第一驱动脉冲和第二驱动脉冲的方式确定。由此,对于各喷嘴,容易更均衡地得到最终的墨排出速度。
124.另外,本实施方式的喷墨记录装置1具备:喷墨头211,该喷墨头211具有多个记录元件200,该记录元件200包括排出墨的喷嘴27和根据所施加的驱动脉冲而对向喷嘴27供给的墨赋予压力变动的压电元件26;以及控制部40,该控制部40控制对压电元件26施加的驱动脉冲向记录元件200的输出。在该喷墨记录装置1中,根据对多个压电元件26的每一个施加的驱动脉冲而由记录元件200的每一个排出的墨液滴的液滴速度相对于驱动脉冲的脉冲宽度的变化成为极大的基准脉冲宽度(实际的al)具有规定的基准以上的偏差。在使根据2个以上的规定数量的驱动脉冲而分别被排出的该规定数量的墨液滴喷落在同一像素范围内的情况下,控制部40针对多个记录元件200的每一个,将比基准脉冲宽度(al)长的脉冲宽度pw1的第一驱动脉冲和比基准脉冲宽度(al)短的脉冲宽度pw2的第二驱动脉冲合计组合规定数量个,并向多个记录元件200的每一个输出。
125.根据这样的喷墨记录装置1,能够利用以往被废弃的非标准的喷墨头211以稳定的墨排出速度排出墨。因此,喷墨记录装置1能够降低制造/维护的成本并且进行稳定的图像的记录动作。
126.需要说明的是,本发明并不限定于上述实施方式,能够进行各种变更。
127.例如,在上述实施方式中,对喷墨头211的所有的记录元件200输出共同的驱动信号,但也可以分别单独地、或对将喷墨头211内的记录元件200分成几个组的每个该组设定驱动信号。在该情况下,对于输出某驱动信号的记录元件200,可以分别设定比该记录元件200的al的任一个长的脉冲宽度pw1和比任一个短的脉冲宽度pw2。
128.另外,在上述实施方式中,对如下情况进行了说明:在至少任一个动作状况下脉冲宽度为代表值pw0的驱动信号引起的排出速度的偏差超过基准的情况下,针对相应的喷墨头211中的每一个像素2发以上的连续的墨排出,始终输出基于第一驱动脉冲和第二驱动脉冲的组合的驱动信号,但也可以仅在超过基准的条件下,切换为输出基于第一驱动脉冲和第二驱动脉冲的组合的驱动信号的动作。
129.另外,在上述实施方式中,对使用墨液滴的排出速度作为特性值的情况进行了说明,但并不限于此。例如,墨的液滴量等也能够用作特性值。
130.另外,在上述实施方式中,利用2次或3次函数等对以多个脉冲宽度测出的排出速度进行拟合而将极大值作为基准脉冲宽度(al),但也可以在极大值附近以足够窄的间隔进行测量而直接求出。
131.另外,也可以不考虑与压电元件26的灵敏度相应的排出的顺序,也可以始终将较长的驱动脉冲或较短的驱动脉冲的一方设为先而将另一方设为后。
132.此外,在上述实施方式中示出的具体结构、处理动作的内容以及步骤等在不脱离本发明的主旨的范围内能够适当变更。本发明的范围包含权利要求书所记载的发明的范围及其等同的范围。
133.工业实用性
134.本发明能够用于喷墨头的驱动控制方法以及喷墨记录装置。
135.附图标记说明
136.1 喷墨记录装置
137.10 输送部
138.11 驱动辊
139.12 输送带
140.13 从动辊
141.14 输送电机
142.15 辊
143.20 记录动作部
144.21、21c、21m、21y、21k 头单元
145.25 头驱动部
146.26 压电元件
147.27 喷嘴
148.27a 开口
149.29 驱动波形信号生成部
150.30 存储部
151.31 al测量数据
152.32 波形设定数据
153.40 控制部
154.41 cpu
155.42 ram
156.50 拍摄部
157.70 通信部
158.81 操作受理部
159.82 显示部
160.90 电力供给部
161.200 记录元件
162.210 滑架
163.211 喷墨头
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。