1.本发明涉及生态环境研究技术领域,尤其涉及基于高光谱及机器学习的植被等效水厚度估算方法。
背景技术:
2.叶片含水量的变化改变植被的氮、碳利用率,影响植被碳循环和能收支的平衡,引起叶片及冠层光谱反射率变化,故在生态环境质量评价需充分考虑植被水分对模型估算精度的影响。等效水厚度作为表征植被叶片含水分布的重要参数,其已被广泛应用于表征植被功能和生态系统过程。因此,实现ewt的快速、准确的估算对植被健康情况,保护生态环境具有重要的指导意义。
3.早期的ewt估算以实地观测为主,该方法具有较高的精度,但具破坏性强、成本高、时效性差等缺点。遥感技术的应用弥补了实地观测方法的不足,并具有监测范围广、数据更新快等优势,是一种大规模、非接触式、动态的观测方法,可获取植被覆盖区光谱辐射强度、面积变化和纹理等信息,为提取植被生化参数提供了有效的信息源。其中,高光谱遥感技术以其高效、无损、多尺度等特点在植被监测中得到了广泛的应用。例如:马岩川等建立基于高光谱遥感数据的棉花冠层ewt快速无损监测估算模型,取得了较好的结果。然而,高光谱数据在进行植被水分监测评述时,因高光谱数据频带数和数据量大等的限制,导致数据实用性降低,易出现像元过饱和现像。因此,在进行植被ewt的研究中,需充分考虑数据属性带来的局限性。
4.基于遥感数据的ewt估算方法已得到了长足的发展,常用的方法有辐射传输模型反演法、植被指数法等。其中,li等提出了3种新的光谱吸收指数,适用于各种植物类型的ewt估算;潘庆梅等分析高光谱数据的光谱指数与叶片水分状况之间的定量关系,筛选出最适合估算核桃叶片含水量的光谱指数,构建核桃叶片含水量估算模型,实现核桃叶片含水量的快速、准确监测。然而,在地形、地势复杂区域内,受地貌、气候、遥感模型参数等因素的影响,以往的估算方法难以满足更多区域的实际应用需求。高光谱技术的应用有效的降低了基于传统遥感技术的植被水分估算的不确定性,但高光谱技术属于近地观测方法,传统辐射传输模型并不适应于近距离地面光谱学。
技术实现要素:
5.1.要解决的技术问题
6.本发明的目的是为了解决现有技术中在地形、地势复杂区域内,受地貌、气候、遥感模型参数等因素的影响,现有的反演、估算方法难以满足局地尺度的实际应用需求的问题,而提出的基于不同高光谱数据分辨率和机器学习算法的提升植被等效水厚度估算模型精度方法。
7.2.技术方案
8.为了实现上述目的,本发明采用了如下技术方案:
9.基于高光谱及机器学习的植被等效水厚度估算方法,包括以下步骤:
10.步骤1:实地观测数据获取,首先,在研究区内,随机选择151棵冠层上方未被遮挡可直接拍摄的树木进行采样,每棵树采集3片新鲜树叶。其次,采用无人机对研究区域航拍,获取包含多个光谱通道的影像数据,并对数据进行预处理得到研究区域的无人机高光谱反射率数据;
11.步骤2:实测等效水厚度的计算,首先,在采集新鲜树叶时,对树叶的表面积及鲜重数据进行统计。其次,将获取的鲜叶于室内烘箱烘至恒重后再次称重,得到叶片干重。最终,实测的等效水厚度值由获取的鲜重,干重和叶面积三个参数计算得到,等效水厚度计算公式为:
[0012][0013]
式中,ewt为叶片等效水厚度,单位为g cm-2
;fw为叶片鲜重,单位为g;dw为叶片干重,单位为g;a为叶片叶面积,单位为cm-2
;
[0014]
步骤3:选择敏感波段,将实地测量数据中的等效水厚度划分为多个范围区间,进而利用多种方法对光谱曲线进行光谱特征分析,突出不同等级等效水厚度与高光谱数据光谱曲线间的光谱特征,获取对植被等效水厚度变化敏感的波段。
[0015]
步骤4:计算特征指数,根据已有经验公式,计算得到经验指数,同时结合选取的敏感波段,计算得到基于敏感波段的植被特征指数;
[0016]
步骤5:构建机器学习模型,首先,本研究将上文得到的特征指数据及原始波段分别重采样后0.5m、1m、2m,利用实测数据的坐标信息提取以上数据建立训练数据集。其次,根据xgboost模型的变量重要性排序结果对模型输入变量进行选择,同时结合rf和xgboost两种机器学习算法,构建6种估算ewt机器学习模型,并使用十折交叉验证法对所有模型进行精度验证。最终,对比分析了不同分辨率、不同模型的ewt估算模型差异及成因。
[0017]
优选地,所述步骤1中无人机为大疆经纬m600多旋翼无人机,且在无人机上搭载nano-hyperspec微型高光谱成像仪。
[0018]
优选地,所述步骤1对数据预处理包括反射率校准、辐射定标、大气校正和拼接。
[0019]
优选地,所述步骤2中以冠层上方未被遮挡可直接拍摄的树木为采样准则。在野外采样过程中,实地称重叶片,并利用万深植物图像分析仪进行扫描获取叶面积。鲜叶在室内烘干至恒重后,根据经验公式计算得到高精度的实测等效水厚度。
[0020]
优选地,所述步骤3中实测等效水厚度划分为0.001-0.01,0.01-0.015,0.015-0.02及0.02g cm-2
以上4个范围区间。并在envi5.3使用一阶导数、二阶导数、包络线去除法,突出不同等级等效水厚度与高光谱数据光谱曲线间的光谱特征,消除光谱曲线相似情况的影响。
[0021]
优选地,所述步骤4中选择了37个植被特征指数,还选取均值、方差、相关性、协同性、相异性、对比度、信息熵与二阶矩8个纹理特征作为模型输入变量参数,避免植被指数可能存在饱和现象;纹理特征选灰度级设置为32,窗口大小为5
×
5,方向为(0,1)。本发明使用的指数主要包括:经验指数,纹理指数和敏感波段指数,共计45个特征指数。
[0022]
优选地,所述步骤4中验证方法是将数据分成10份,每份数据具有几乎相同的样本数,留下一份作为测试数据,轮流取另外9份作为训练集,总共建立十个模型,取其平均预测
精度为最终精度,将决定系数r2(式2)与均方根误差rmse(式3)作为不同分辨率模型的精度评价标准;
[0023][0024][0025]
式中,为预测值;为均值;yi为实测值;n为样本个数。
[0026]
3.有益效果
[0027]
相比于现有技术,本发明的优点在于:
[0028]
(1)本发明中,根据野外调查数据计算得到样点的关键植被参数(ewt),同时,利用一阶导数、二阶导数、包络线去除法等分析光谱曲线的光谱特征,识别敏感波段,计算多种植被指数和纹理指数,进而得到不同分辨率的环境变量栅格数据。在此基础上,对从不同空间分辨率的数据进行提取,得到含有原始光谱信息、植被指数、纹理指数等环境变量数据的训练数据集,进而实现不同空间分辨率数据变量的机器学习模型构建。
[0029]
(2)本发明中,充分挖掘了不同空间分辨率的高光谱遥感数据图谱特征,构建了适宜于研究区的多空间分辨率特征指数,进而对比分析了不同空间分辨率模型的差异,证明了空间分辨率的转换对模型估算精度产生着重要影响,对未来类似研究的工作具有重要的借鉴意义。
附图说明
[0030]
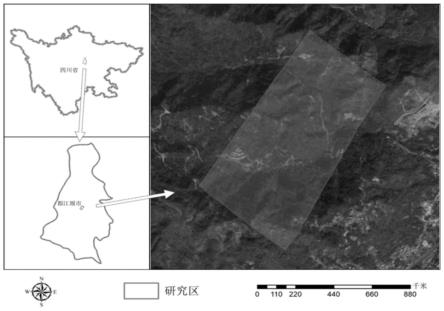
图1为本发明实施例1中的研究区区位图;
[0031]
图2为本发明实施例2中的实地观测的等效水厚度数据密度分布曲线图;
[0032]
图3为本发明实施例2中的光谱特征选择图。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0034]
实施例1:
[0035]
参照图1,本研究区(103
°
37
′
29
″‑
103
°
38
′
36
″
e,31
°1′
25
″‑
31
°2′
39
″
n)位于成都市都江堰市区北部、岷江出口东侧、川西龙门山东南,总面积约1.88km2。区内具有西南高、东北低的地势特征,地形以山地丘陵为主,海拔812-1157m,相对高差为345m。年均气温15.2℃,无霜期247-269d,雨量528.7-1332.2mm,日照1693.9-1042.2h。
[0036]
区内主要包含自然林地、人工林、经济作物、人工种植景观、居民区、道路等多种用地类型,地类复杂多样且受人为扰动明显。其中:自然林地的物种包含五角枫(acer pictum thunb.)、松树(pinus)等;人工林的物种包含樟树(cinnamomum camphora(l.)presl)、竹林(bamboo),银杏(ginkgo biloba l.)等;经济作物的物种包含猕猴桃(actinidia chinensis planch.)、茶树(camellia sinensis(l.)o.ktze.)等;人工种植景观的物种包含桂花树(osmanthus fragrans(thunb.)lour.)、松树(pinus linn)等。
[0037]
基于高光谱及机器学习的植被等效水厚度估算方法,包括以下步骤:
[0038]
步骤1:高光谱数据的获取,采用的高光谱数据主要是基于大疆经纬m600多旋翼无人机搭载nano-hyperspec微型高光谱成像仪进行观测得到的。无人机航拍历时3天(2021.07.01-2021.07.03),共飞行6架次,真高300m(含),获取了包含270个光谱通道的影像数据,该数据进行反射率校准、辐射定标、大气校正、拼接等预处理后,得到研究区域的无人机高光谱反射率数据,见表1:
[0039]
表1原始波段信息
[0040][0041][0042]
步骤2:实测等效水厚计算,野外实地观测数据主要以冠层上方未被遮挡可直接拍摄的树木为采样准则,共选取样树151棵,收集鲜叶440片。在野外采样过程中,实地称重叶片鲜重,并利用万深植物图像分析仪进行扫描获取叶面积。获取的鲜叶于室内烘箱烘至恒重后再次称重,得到叶片干重,其中等效水厚指标由以获取的鲜重,干重和叶面积三个参数计算得到,等效水厚度计算公式为:
[0043]
[0044]
式中,ewt为叶片等效水厚度,单位为g cm-2
;fw为叶片鲜重,单位为g;dw为叶片干重,单位为g;a为叶片叶面积,单位为cm-2
;
[0045]
步骤3:敏感波段获取,将实地测量数据中的等效水厚度划分为0.001-0.01,0.01-0.015,0.015-0.02及0.02g cm-2
以上4个范围区间,进而利用多种方法对光谱曲线进行光谱特征分析,突出不同等级等效水厚度与高光谱数据光谱曲线间的光谱特征,获取对植被等效水厚度变化敏感的波段。该部分操作在envi5.3中实现;
[0046]
步骤4:特征指数计算,利用现有指数方程计算得到植被特征指数。同时,根据经验公式,计算获取相对应的植被指数。本研究还选取均值(mean)、方差(var)、相关性(cor)、协同性(hom)、相异性(dis)、对比度(con)、信息熵(ent)与二阶矩(sec)8个纹理特征(见表3)作为模型输入变量参数,以避免植被指数可能存在饱和现象。纹理特征选灰度级设置为32,窗口大小为5
×
5,方向为(0,1)。本文使用的指数主要包括:经验指数,纹理指数和敏感波段指数,共计45个特征指数。见表2-3:
[0047]
表2植被指数
[0048]
[0049]
[0050]
[0051][0052]
注:表中,ri表示i nm处的反射率;字母 数字指直接使用原文已有的公式计算得到的植被指数,即经验指数;字母 _ 数字指由敏感波段计算得到的指数,即敏感波段指数;使用的植被指数计算公式主要来源于c.t.de almeida等人的研究。
[0053]
表3纹理指数
[0054]
[0055][0056]
步骤5:机器学习模型的构建,首先,本研究将上文计算的特征指及高光谱原始波段分别重采样至0.5m、1m、2m后,利用实测数据的坐标信息提取以上数据建立训练数据集。其次,根据xgboost模型的变量重要性排序结果对模型输入变量进行选择,同时结合rf和xgboost两种机器学习算法,构建6种估算ewt机器学习模型。最后,使用十折交叉验证法对所有模型进行精度验证。
[0057]
验证方法是将数据分成10份,每份数据具有几乎相同的样本数,留下一份作为测试数据,轮流取另外9份作为训练集,总共建立十个模型,取其平均预测精度为最终精度,将决定系数r2(式2)与均方根误差rmse(式3)作为模型精度评价标准;
[0058][0059][0060]
式中,为预测值;为均值;yi为实测值;n为样本个数。
[0061]
本发明中,本研究根据野外调查数据计算得到样点的关键植被参数(ewt),同时,
根据实测样地的地理坐标提取高光谱数据的光谱信息,进而利用一阶导数、二阶导数、包络线去除等方法对光谱曲线进行光谱特征分析,识别敏感波段,并计算特征指数,获取不同分辨率的环境变量数据,实现不同空间分辨率数据变量的机器学习模型构建。
[0062]
本发明中,充分挖掘了不同空间分辨率的高光谱遥感数据图谱特征,构建了适宜于研究区的多空间分辨率机器学习估算模型,对未来类似研究的工作具有重要的借鉴意义。
[0063]
实施例2:
[0064]
结果与分析主要包括:
[0065]
1.实测等效水厚度:通过对观测数据进行统计,得到研究区ewt平均值为0.014g cm-2
;ewt最大值为0.027g cm-2
;ewt最小值为0.002g cm-2
。ewt密度曲线结果表明,实测数据呈现出近正态分布特征(见图2),且分布区间较大,满足建模需求。
[0066]
2.敏感波段:计算了植被增强指数、归一化植被指数、植被水分指数等多个特征指数。将实测数据划分为四类后,数据的原始波段在770nm和904nm处能较好区分不同范围ewt值的特征(见图3)。经包络线去除后,光谱在533nm处的波峰、504nm与680nm处的波谷处均表现出明显的差异。通过对原始光谱与包络线去除进行光谱分析,最终选择504nm、533nm、680nm、770nm与904nm即b48、b61、b127、b167和b227作为能突出不同ewt植被光谱特征的敏感波段。
[0067]
3.特征变量:基于xgboost算法对不同空间分辨率数据的输入变量(原始波段,植被指数,纹理特征指数)进行重要性排序,来确定参与建模的最优变量(见表4),为突出不同模型间的差异性,相同分辨率的两种模型输入相同的变量。其中,0.5m空间分辨率的特征指数作为输入变量时,敏感波段构建的各类指数对模型的贡献度并不大;1m空间分辨率模型表明,敏感波段(770nm、904nm)构建的vog_1指数参与了建模;在2m空间分辨率输入变量中,敏感波段构建的rep_1,cor(b167)指数对模型贡献明显增加。由此可见,随着空间分辨率的降低,近红外770nm、904nm波段构建的指数对模型训练的贡献增大。
[0068]
4.模型精度:根据rf与xgboost模型的训练结果显示(见表4),rf(r2=0.49,rmse=0.0032g cm-2
)与xgboost(r2=0.41,rmse=0.0034g cm-2
)都在2m空间分辨率下具有最高的精度。由此可见,模型精度随空间分辨率降低而提高,当空间分辨率达到2m时,模拟精度达到最高。通过对比同一分辨率下的两种模型精度,发现rf较xgboost具有更高的精度。另外,在1m、2m空间分辨率中,由敏感波段构建的rep_1,cor(b167),和vog_1指数提升模型精度明显。机器学习模型随输入数据分辨率的降低,参与建模的特征指数量增加。
[0069]
表4不同空间分辨率变量输入的模型精度
[0070][0071][0072]
本发明中,无人机获取的高空间分辨率数据存在“椒盐效应”,使得不同树种冠层结构复杂、空间异质性大,因此选择合适的数据源有利于植被关键参数的估算。通过对比分析了不同空间分辨率输入变量的rf和xgboost模型在都江堰地区的植被ewt估算中的模型效率。研究结果发现输入变量的空间分辨率影响模型精度,2m空间分辨率的数据得到了最高的模型精度。另外,ewt实测数据范围在0.009-0.027g cm-2
,2m空间分辨率的rf模型估算的ewt分布于0.006-0.023g cm-2
之间,两者可有效地反映植被叶片水分的变化。由此可见,模型输入变量的最优空间分辨率为2米。
[0073]
本发明中,还发现在对植被ewt的估算过程中,当输入变量空间分辨率从0.5m降低到2m时,rf模型的精度从0.21提升到0.49,这表明选取合适的空间分辨率对估算ewt具有重要的作用。高空间分辨率数据中的植被冠层由多个像元构成,增加了冠层像元的空间异质性,在此情况下,同类植被的冠层的光谱特征和空间纹理特征并不能被单个像元所表征。因为高光谱遥感影像数据具有高纬度、高空间分辨率、信息冗余等特点,其单个像元与周边像元的波谱相关性和空间相关性较大。在样本量一定的情况下,数据波段的增加,会使模型的精度呈现出“先增后减”的hughes现象。
[0074]
本发明中,这种现象的存在使得0.5m空间分辨率下模型效率降低,分析其形成原因主要因该模型的输入变量为高光谱数据的原始波段,且各波段较为接近,不能准确的响应地表植被水分。基于敏感波段的特征指数法可有效实现高光谱数据的降维,该过程主要结合了地物的光谱特征,运用了波段计算突出与植被水分相关的敏感特征,促进模型精度的提升。例如,基于特征指数法构建的1m、2m空间分辨率的植被特征指数有助于模型精度升高。
[0075]
本发明中,进一步发现改变输入数据的空间分辨率,可更精准的表征植被冠层信息,构建的特征指数更有效。同一植被冠层内的像元数量随着空间分辨率的升高而增加,由于像元的空间相关性的存在,植被冠层像元应存在着高度相似性。然而,受地形、坡向、观测时间和角度的影响,不同空间分辨率的植被冠层像元存在明显的空间异质性,同物异谱、同谱异物现象普遍存在。空间分辨率的升高引起数据的图像噪声增加,使得图像光谱“失真”,降低了估算模型精度。数据的这种“失真”,可通过分辨率的降低来抑制。在观测区域内,土地利用类型多为林地、果园、茶树园等,植被冠层的大小虽有差异,但植被冠幅与本研究的2m最佳空间尺度相近。因此,不同研究区的空间分辨率应根据当地植被的冠层冠幅大小确定。
[0076]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。