1.本技术涉及触觉刺激装置领域,尤其涉及用于触觉刺激的柔性镀膜微针阵列电极、制备方法及应用。
背景技术:
2.人体皮肤表皮主要由角质层和死亡表皮细胞组成,角质层的阻抗很大,保护人体的同时也会阻碍电流进入人体,如阻碍需要给予人电刺激的电流,如果皮肤阻抗大,就需要提高电流幅值,会造成刺痛,发热灼伤皮肤等不好的体验。临床上对生物触觉电刺激主要是传统的凝胶电极和需要浸润生理盐水的海绵电极等,不仅体积大,而且佩戴不舒适,凝胶电极粘贴久了还可能会出现过敏反应。有时需要对被试的刺激区域进行降阻处理,主要操作为先用磨砂膏去除目标区域的皮肤角质层,增加皮肤的导电性,对于被试的测试体验非常不友好。
3.触觉是皮肤上的神经细胞接受来自外界的温度、湿度、疼痛、压力、振动等方面的感觉。多数动物的触觉器是遍布全身的,例如人的皮肤位于人的体表。触觉作为人的五感体验之一,是人类感知外界环境信息最重要的渠道。人体触觉感受器遍布全身,能强烈区分自我与外界的刺激,触觉的形成并不是单个细胞或感受器对外界刺激的响应就可以完成的,皮肤的方寸之间,高度密集地分布了各种触觉感受器和神经末梢。这些感受器组成团簇分别包埋在皮肤内,分工明确,共同协作,完成人体与环境的触觉信息交互。而目前市场上触觉设备很少有能同时满足响应快、体积小、电流小、高精度的要求。如气动膜片式刺激的刺激仪,单点刺激面积可达直径1厘米,不适用于对身体任意一个局部小位置的高精度研究;有的使用空气风箱或喷嘴,但因其各喷嘴需要与刺激位置保持固定,且无法保证与皮肤同样的距离,因而无法保证刺激精度;而一般的机械刺激通常需要加速的机械部件,例如,振动马达,并且刺激参数(强度和频率)不可以独立地调节,功耗大且与电刺激比有延时等问题;而市面出售的凝胶电极,通常体积偏大,不能满足高精度的触觉刺激,且电极-皮肤界面具有可变和不稳定的高阻抗(例如,出汗),导致刺激不稳定。
技术实现要素:
4.本技术目的在于提供了一种用于触觉刺激装置的柔性镀膜微针阵列电极加工及其应用,以解决上述背景技术提出的目前市场上传统触觉刺激装置触觉刺激面积大导致精度不够高,设备功耗大,电流大、体积大,提供的持续刺激不稳定,电流大发热灼伤皮肤等问题。
5.为实现上述目的,本技术提供了用于触觉刺激的柔性镀膜微针阵列电极,其特征在于,包括:柔性导电衬底和微针电极阵列组成;所述微针电极阵列安装在所述柔性导电衬底上方。
6.优选的,所述微针阵列电极包括:针柱和针尖;
7.所述针柱与所述柔性导电衬底为一体成型,且说是针柱上镀有绝缘层膜光刻胶;
8.所述针尖不镀绝缘层,具有导电性。
9.优选的,多个所述柔性导电衬底可以进行串联,数量根据触觉刺激的部位增加而增加。
10.本技术还提供了用于触觉刺激的柔性镀膜微针的制备方法,用于制备前述的柔性镀膜微针,步骤包括:
11.确定阳模具;
12.基于所述阳模具制备阴模具;
13.基于所述阴模具将所述针柱与所述柔性导电衬底进行一体成型,得到柔性不导电微针电极;
14.将所述柔性不导电微针电极进行处理,得到所述柔性镀膜微针阵列电极。
15.优选的,制备所述阴模具的方法包括:
16.利用聚二甲基硅氧烷和固化剂进行搅拌混合,得到制备材料;
17.将所述制备材料放进真空腔体,进行负压去气泡处理,得到处理后材料;
18.倒膜,将所述处理后材料放入容器中,浇筑聚二甲基硅氧烷,并再次进行抽真空去气泡处理,得到样品;
19.将所述样品放入烘箱烘干,得到烘干后样品;
20.对所述烘干后样品做脱模处理,得到所述阴模具。
21.优选的,得到所述柔性不导电微针电极的方法包括:
22.将聚二甲基硅氧烷与固化剂按质量进行比例混合后,加热至熔融温度以上,倒入所述阴模具中,一体成型,得到聚合物;
23.在所述聚合物冷固后,将所述聚合物从得到阴模具中剥离出来,得到所述柔性不导电微针电极。
24.优选的,得到所述柔性镀膜微针电极阵列的方法包括:
25.将所述柔性不导电微针电极进行裁剪和打磨,去除多余的边角料;
26.在每个所述柔性不导电微针电极表面进行导电材料的覆盖,得到柔性微针电极阵列;
27.将所述柔性微针电极阵列整体浸入光刻胶中;
28.将涂覆光刻胶的所述针尖和所述柔性导电衬底进行曝光处理;得到所述柔性镀膜微针阵列电极。
29.本技术还提供了用于触觉刺激的柔性镀膜微针的操作方法,用于控制前述的柔性镀膜微针,步骤包括:
30.将所述柔性镀膜微针阵列电极的正负电极压入皮肤穿过角质层接近真皮层附近并固定好所述微针电极阵列,根据模拟触觉的需要进行刺激波形以及电流大小的选择。
31.与现有技术相比,本技术的有益效果如下:
32.本技术的电极柔软舒适,阻抗低,便携性好,适于长期佩戴,柔性微针电极可穿过高阻抗的皮肤角质层,使用微安级小电流即可,仅通过导电的微针针尖放电可以起到精确控制触觉刺激点,实现直接点对点刺激的效果,实现响应快、小体积、小电流、高精度的要求。此外,本技术电极制备方法中提供的微注射成型的模具,除尺寸明显小于传统模具尺寸外,还具有以下特点:产品外观尺寸精度高;更容易控制模温的稳定,符合精密成型要求,也
节约了模具加热/冷却所需的能量;模具成本低,开发周期短;此类加工方还具有多功能性,高再现性,模具可重复使用,适合大批量生产。
附图说明
33.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
34.图1为本技术实施例一装置的主视图;
35.图2为本技术实施例一装置的左视图;
36.图3为本技术实施例一装置的俯视图;
37.图4为本技术实施例一装置的轴测图
38.图5本技术实施例一通过导线扩展图;
39.图6本技术实施例二中结合电刺激设备使用示意图。
40.附图标记说明:1、微针电极针尖;2、微针电极针柱;3、微针电极基底;4、微针电极;5、柔性衬底;6、导线;7、刺激正极;8、刺激负极。
具体实施方式
41.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
42.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本技术作进一步详细的说明。
43.实施例一
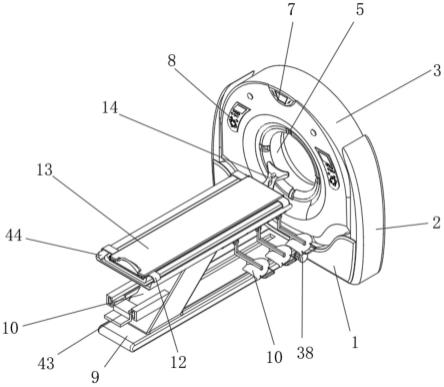
44.如图1-图4所示,为实施例的系统结构示意图,包括:导电柔性衬底(5)和衬底上方的微针电极阵列,其中,微针电极(4)包括镀有绝缘层的微针电极针柱(2)和导电的微针电极针尖(1);微针电极(4)与导电柔性衬底(5)是一体成型的;微针电极针柱(2)上镀有绝缘层膜光刻胶,针柱外表面不导电,仅内部导电;微针电极针尖(1)不镀绝缘层,具有导电性;微针电极的柔性衬底(5)不镀绝缘层,具有导电性。
45.在本实施例中,可根据需要调节模具进而调节微针参数,微针的针体露出柔性导电衬底的高度为150um~800um,针尖直径10~100um,微针底座直径40~350um,微针间间距160~2000um以及微针面积0.2
×
0.2cm~2
×
2cm大小。实际使用时,特别由于刺激点的需要可根据需要调节模具进而调节微针电极面积大小,可做到按需求生产。
46.此外,在本实施例中,柔性导电衬底可以通过导线(6)和另一个镀膜柔性微针电极阵列衬底串联,如图5所示;且数量可根据需要触觉刺激的部位增加而增加。在实际模拟触觉的时候,可能需要同时刺激多个位置,只需通过连接导线的方法串联多个电极,也可保证刺激的同步性。
47.实施例二
48.下面结合本实施例来说明本技术柔性镀膜微针阵列电极的制备方法。
49.确定阳模具,取适量配比的聚二甲基硅氧烷以及固化剂进行搅拌混合,得到制备材料;
50.将上面配好的制备材料放进真空腔体,进行负压去气泡处理,得到处理后的材料;
51.倒模,将处理后的材料放入容器中,浇筑聚二甲基硅氧烷,并再次进行抽真空去气泡处理,得到样品;
52.把样品放入烘箱烘干约半小时,得到烘干后样品;
53.对烘干后样品做脱模处理,得到制作微针的阴模具;
54.将微针材料聚二甲基硅氧烷与固化剂按质量进行一定比列混合后,加热至熔融温度以上,倒入阴模具,一体成型,得到聚合物;
55.等聚合物冷固后将聚合物柔性不导电的微针阵列电极从阴模中剥离出来;
56.将从阴模中取出的不导电微针阵列电极进行裁剪和打磨,去除多余的边角料;
57.在每个柔性不导电的微针阵列电极表面进行钛、金材料的覆盖,得到柔性微针电极阵列;
58.将覆盖了导电材料的柔性微针电极阵列整体浸入光刻胶中;
59.将涂覆光刻胶的柔性微针电极针尖和柔性衬底进行曝光处理,针柱部分不做曝光处理,表面留下绝缘层光刻胶,制成最终的用于触觉刺激装置的柔性镀膜微针阵列电极。
60.相对于其他微针电极,本技术在针柱处镀上绝缘层,在微针穿过角质层后,只有微针的针尖放电,由于人的皮肤方寸之间,高度密集地分布了各种触觉感受器和神经末梢,相对于其他电刺激类的电极的一片区域放电,本技术的针尖放电模拟触觉精度更高,实现点对点放电。由于微针电极穿过了高电阻的角质层,所需电流更小,达到微安级别。
61.实施例三
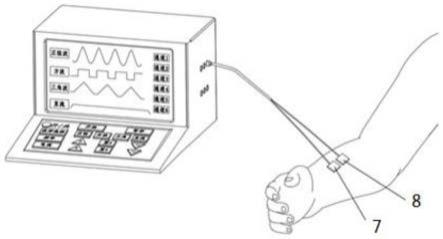
62.如图6所示,为申请结合电刺激设备使用示意图,使用该触觉刺激装置的柔性镀膜微针阵列电极,将微针电极一端接入市售的电刺激设备,另一端接上本技术的两个柔性微针阵列电极,分别是正极(7)和负极(8),将正负电极压入皮肤穿过角质层接近真皮层附近并固定好微针阵列电极,然后根据模拟触觉的需要进行刺激波形以及电流大小的选择。
63.需要说明的是,在本技术的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
64.以上所述的实施例仅是对本技术优选方式进行的描述,并非对本技术的范围进行限定,在不脱离本技术设计精神的前提下,本领域普通技术人员对本技术的技术方案做出的各种变形和改进,均应落入本技术权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。