1.本发明涉及机器人控制领域,具体地说,是一种爬壁机器人子母控制系统。
背景技术:
2.爬壁机器人是可以在垂直墙壁上攀爬并完成作业的自动化机器人。爬壁机器人又称为壁面移动机器人,可以替代人力在垂直壁面作业,降低减少人力在高空作业的危险性,提高作业效率。但是爬壁机器人一般由工人现场操作,电控系统复杂时,会提高学习成本,提高出错几率,而且爬壁机器人上还架设有用于清洗的清洗装置,其控制系统往往与机器人本身的行进系统整合于一起,增加了控制单元的运算压力。
3.中国专利申请cn113798251a公开了一种清洗机器人及用于清洗机器人的控制系统,其中清洗机器人包括行进装置、伸展装置和喷洒装置,且喷洒装置装配在所述伸展装置上,所述控制系统包括:主控制器,用于发出控制所述清洗机器人的控制指令;行进驱动机构,与所述主控制器连接,用于根据所述主控制器的控制指令驱动所述行进装置;伸展驱动机构,与所述主控制器连接,用于根据所述主控制器的控制指令驱动所述伸展装置执行伸展动作;喷洒驱动结构,与所述主控制器连接,用于根据所述主控制器的控制指令,在所述伸展装置展开时控制所述喷洒装置执行喷洒动作。该专利所提供的技术方案可以解决清洗机器人不能在猪舍内自由行进的问题,但是,如上所述,其通过主控制器同时处理行进驱动机构、伸展驱动机构、喷洒驱动机构的控制信号,大大的提升了对主控制器性能的要求,同时,应理解的是,处理信号的增多,会降低主控制器的反应速度。
4.综上所述,亟需一种既能够降低电控系统的复杂程度,又能降低操作人员的学习成本,可靠、灵活的爬壁机器人子母控制系统。
技术实现要素:
5.本发明的目的是,提供一种既能够降低电控系统的复杂程度,又能降低操作人员的学习成本,可靠、灵活的爬壁机器人子母控制系统。
6.为实现上述目的,本发明采取的技术方案是:
7.一种爬壁机器人子母控制系统,包括主机系统、从机系统;所述主机系统用于接收并处理遥控指令;所述从机系统用于接收处理所述主机控制模块发出的指令;其中,所述主机系统还用于控制外围设备的驱动,所述从机系统用于控制行进模块的驱动;所述爬壁机器人子母控制系统执行下述控制方法:主机系统获取遥控指令,其中,所述遥控指令包括手动遥控指令、半自动遥控指令、全自动遥控指令;输出控制指令,其中,所述控制指令包括从机控制指令、外围驱动控制指令;从机系统获取所述从机控制指令;从机系统执行所述从机控制指令。
8.作为一种优选的技术方案,包括遥控终端,所述遥控终端用于输出遥控指令。
9.作为一种优选的技术方案,所述遥控终端包括运行模式开关、运行状态开关;其中所述运行模式开关用于提供手动遥控指令、半自动遥控指令或全自动遥控指令;所述运行
状态开关用于提供控制指令。
10.作为一种优选的技术方案,所述运行状态开关包括方向控制开关、速度控制开关。
11.作为一种优选的技术方案,所述外围设备与所述主机系统电连接。
12.本发明优点在于:
13.1、本发明所述爬壁机器人子母控制系统,包括主机系统、从机系统;所述主机系统用于接收并处理遥控指令;所述从机系统用于接收处理所述主机控制模块发出的指令;其中,所述主机系统还用于控制外围设备的驱动,所述从机系统用于控制行进模块的驱动;主机系统与从机系统的主从设置,将行进系统与外围模块的控制端分离,降低了单一运算模块的运算处理难度。
14.2、本发明所述爬壁机器人子母控制系统执行下述控制方法:主机系统获取遥控指令,其中,所述遥控指令包括手动遥控指令、半自动遥控指令、全自动遥控指令;输出控制指令,其中,所述控制指令包括从机控制指令、外围驱动控制指令;从机系统获取所述从机控制指令;从机系统执行所述从机控制指令;其指令简单,逻辑清晰,配合手动遥控指令、半自动遥控指令、全自动遥控指令可根据实际情况实现多方式控制,降低人工操作学习成本。
附图说明
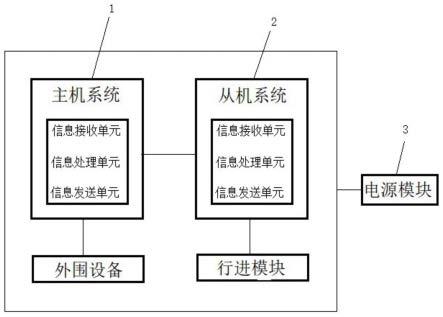
15.附图1是本发明一种爬壁机器人子母控制系统模块图。
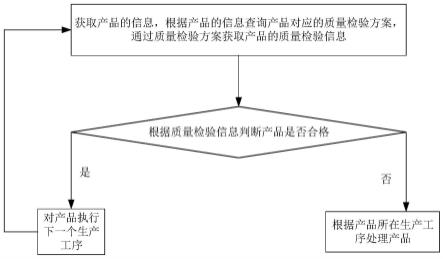
16.附图2是本发明一种爬壁机器人子母控制系统流程图。
17.附图3是本发明一种爬壁机器人子母控制系统执行步骤图。
具体实施方式
18.下面结合具体实施方式,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明记载的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
19.附图中涉及的附图标记和组成部分如下所示:
20.1.主机系统2.从机系统3.电源模块
21.实施例1
22.请参见附图1,附图1是本发明一种爬壁机器人子母控制系统模块图。一种爬壁机器人子母控制系统,包括主机系统1、从机系统2,以及用于供电的电源模块3,还包括用于提供遥控指令的遥控终端;具体的,爬壁机器人包括从机系统控制的行进模块,即左右驱动轮,与主机系统控制的外围设备,应理解的是,所述外围设备可以为可拆卸式模块,其通过相应的接口进行连接固定及保持稳定的电连接;所述主机系统通过接收遥控终端发出的遥控指令,作为状态机状态跃迁的事件,以改变相应的状态,进而为从机系统发送控制指令并驱动外围设备;所述从机系统用于获取主机输出的控制指令,并完成对行进模块的控制;
23.应理解的是,所述主机系统及从机系统包括用于解析处理的信息处理单元、用于接收信息的信息接收单元、用于发送信息的信息发送单元,以与其相连的模块形成交互;
24.请参见附图2,附图2是本发明一种爬壁机器人子母控制系统流程图。具体的,所述爬壁机器人子母控制系统至少执行如下述步骤s10-s40:
25.步骤s10:主机系统获取遥控指令,其中,所述遥控指令包括手动遥控指令、半自动遥控指令、全自动遥控指令;
26.对应的,所述遥控终端上设有运行模式开关,所述运行模式开关对应着控制着手动遥控指令、半自动遥控指令、全自动遥控指令;所述遥控终端上还设有运行状态开关,所述运行状态开关包括方向控制开关、速度控制开关,所述方向控制开关为可以前后左右四向移动的遥杆,所述速度控制开关为控制加减速的按钮,应理解的是,速度控制与方向控制的按键可整合在一起,如通过摇杆摇动的深度来控制速度的大小等,其皆为现有技术。
27.步骤s20:输出控制指令,其中,所述控制指令包括从机控制指令、外围驱动控制指令;
28.当所述运行模式开关处于手动遥控指令时,操作人员操作遥杆控制爬壁机器人的运行方向,并通过速度控制指令控制行进的速度,所述遥控终端将信号发出,所述主机系统将控制信号进行运算解析,生成控制指令并输出,即输出控制爬壁机器人运行的指令;
29.当所述运行模式开关处于半自动遥控指令时,爬壁机器人行进的方向为定向移动,操作人员通过速度控制指令控制行进的速度,如使用加速或减速按键等,所述遥控终端将速度信号发出;由主机系统接收并处理;
30.当所述运行模式开关处于全自动遥控指令时,爬壁机器人进入自动行驶状态;
31.需要说明的是,为了通过合适的路径更完整的清理仓壁,所述主机系统内还可进行状态预设,即规划相应的行径路径,使得爬壁机器人按相关路径自行移动。
32.在一些实施例中,所述外围设备的位置亦可以操作,如,当清洗盘固定于爬壁机器人一侧时,还需清洗系统的开关,当清洗盘活动连接于爬壁机器人上时,连接清洗盘的机械臂即具有相应的自由度,因此,所述遥控终端上还应该包括控制外围设备的操控组件,如控制机械臂转动的遥感、控制清洗盘工作开关的按钮等;
33.需要说明的是,所述外围设备由所述主机系统进行驱动控制,所述主机系统接收到遥控指令,对其进行分析处理,将行进指令即从机控制指令发送给从机系统处理并执行,将外围驱动控制指令解析并执行,用于控制外围设备的运行;
34.步骤s30:从机系统获取所述从机控制指令;
35.所述从机系统接收所述主机系统传来的从机控制指令,对其进行解析,实现对步进电机的运转控制,从而控制爬壁机器人的行进。
36.需要说明的是:本发明所述爬壁机器人子母控制系统,包括主机系统、从机系统;所述主机系统用于接收并处理遥控指令;所述从机系统用于接收处理所述主机控制模块发出的指令;其中,所述主机系统还用于控制外围设备的驱动,所述从机系统用于控制行进模块的驱动;主机系统与从机系统的主从设置,将行进系统与外围模块的控制端分离,降低了单一运算模块的运算处理难度;主机系统获取遥控指令,其中,所述遥控指令包括手动遥控指令、半自动遥控指令、全自动遥控指令;输出控制指令,其中,所述控制指令包括从机控制指令、外围驱动控制指令;从机系统获取所述从机控制指令;从机系统执行所述从机控制指令;其指令简单,逻辑清晰,配合手动遥控指令、半自动遥控指令、全自动遥控指令可根据实际情况实现多方式控制,降低人工操作学习成本。
37.实施例2
38.请参见附图3,附图3是本发明一种爬壁机器人子母控制系统执行步骤图。本实施
例结合具体的实施方式对本技术的操作步骤进行说明:
39.步骤一:开机状态,获取急停保护状态,若开启则关机,若关闭则执行步骤二;
40.步骤二:获取运行开关状态,若运行开关关,则处于停止模式,并执行步骤一;否则执行步骤三;
41.步骤三:获取判断手动开关是否开启,若是则获取操控装置的状态进行执行相应信息;若否,则执行步骤四;
42.步骤四:获取判断半自动开关是否开启,若是则获取操控装置的状态进行执行相应信息,应理解的是,半自动状态下,相比于手动状态,可以少操作一组参数,如速度一定控制方向等;若否,则全自动开关为开启状态,执行步骤五;
43.步骤五:读取预设动作并运行,具体的,如设定相应的路径供自动执行等。
44.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和补充,这些改进和补充也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。