1.本发明涉及码垛装置技术领域,具体为一种基于机器视觉的工业机器人自动堆叠码垛装置。
背景技术:
2.经检索,中国专利号cn202022007313.3,公开了一种基于物流仓储用码垛装置,包括码垛装置本体,所述码垛装置本体正面包括把手和受力杆,所述把手设有控制开关,所述受力杆包括橡胶垫和受力轮,所述码垛装置本体两侧下端安装受力块和旋转轮,所述码垛装置本体内部包括隔离网、链条、货叉和电机,所述电机内部包括齿轮和蓄电池。
3.上述装置的有益效果为:该基于物流仓储用码垛装置,通过码垛装置本体构造简单底部安装电机,且电机内部设有蓄电池,达到了该装置简易构造,扩大了使用者人群,非专业的人员也可操作使用的有益效果,利用码垛装置本体内部包括受力杆、旋转轮、隔离网、货叉、电机等简易构造达到了不占空间,且便于移动等有益效果。
4.但在实际应用过程中,现有的码垛装置有很多采用夹持固定的方式,对货物进行移动和堆叠码垛,但现有的夹具在对货物进行夹持时,无法根据货物的大小或造型进行很好的适用,并且当货物码垛一定数量后,后续放入的货物外侧会存在其他货物,导致夹具无法稳定的将货物放下堆叠,为此,我们提出一种基于机器视觉的工业机器人自动堆叠码垛装置。
技术实现要素:
5.本发明的目的在于提供一种基于机器视觉的工业机器人自动堆叠码垛装置,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种基于机器视觉的工业机器人自动堆叠码垛装置,包括行走控制架,所述行走控制架上安装有两组独立运行的码垛夹持机构,所述行走控制架的下端安装有自行机构,所述码垛夹持机构包括安装在行走控制架上的液压缸,所述液压缸的活塞杆下端连接有升降台,所述升降台的内部连接有转向控制电机,所述转向控制电机的输出轴和固定夹板固定连接,所述固定夹板的两侧均设置有调节槽,所述调节槽内通过轴铰接有转动台,所述固定夹板的上端表面连接有转动控制电机,所述转动控制电机的输出轴和安装转动台的轴传动连接,所述转动台的内部设置有安装槽,所述安装槽内连接有辅助夹板控制电机,所述辅助夹板控制电机的输出轴和可调辅助夹板传动连接。
7.优选的,所述可调辅助夹板的表面设置有等距离线性分布的固定槽,每组所述固定槽内均安装有气囊,所述可调辅助夹板的背面安装有充放气设备,所述气囊均通过连通管一和充放气设备连通。
8.优选的,所述固定夹板的背面连接有两组对称分布的密封柱筒,两组所述密封柱筒内均设置有加压槽,所述加压槽内插设有可滑动的密封滑块,所述密封滑块的背面连接
有密封垫,所述密封垫和加压槽相适配,所述固定夹板的背面连接有加压设备,所述加压设备通过连通管二和加压槽内相连通,所述密封滑块的表面连接有吸盘。
9.优选的,所述固定夹板的背面设置有凸块,所述凸块的表面连接有摄像头调节电机,所述摄像头调节电机的输出轴上连接有固定杆,所述固定杆的下端连接有视觉摄像头。
10.优选的,所述行走控制架包括安装在多组自行机构上的垂直架,多组所述垂直架横向之间通过上方的横延架连接,两组所述横延架的侧面连接有两组纵延架,所述行走控制架整体为矩形框架结构。
11.优选的,两组所述横延架的中心位置插设有纵向丝杆,两组所述横延架的两侧插设有两组纵向限位杆,所述纵向丝杆和两组纵向限位杆呈平行分布,所述纵向丝杆和两组纵向限位杆之间均安装有纵向滑块,两组所述纵延架位于两组纵向限位杆的下方,一组所述横延架的表面连接有纵向控制电机,所述纵向控制电机的输出轴和纵向丝杆传动连接,所述纵向丝杆上的纵向滑块内部设置有螺纹孔与之相适配。
12.优选的,三组所述纵向滑块内分别插设有横向丝杆和横向限位杆,所述纵向限位杆上安装的纵向滑块表面连接有横向控制电机,所述横向控制电机的输出轴和横向丝杆传动连接,所述横向丝杆和横向限位杆的表面安装有两组相适配的横向滑块,两组所述横向滑块的型号相同。
13.优选的,两组所述横向滑块之间均插设有半截的间距调节丝杆和间隙限位杆,两组所述横向滑块上均安装有间距调节电机并且间距调节电机的输出轴和间距调节丝杆传动连接,两组所述横向滑块上安装的间距调节丝杆、间隙限位杆和间距调节电机呈镜像分布,一组所述横向滑块上的间距调节丝杆和间隙限位杆分别和另一组横向滑块上的间隙限位杆和间距调节丝杆对齐,位于所述纵向丝杆上安装的纵向滑块下方表面连接有两组安装座,两组所述安装座内均插设有连接器,呈同心圆分布的两组所述间距调节丝杆和间隙限位杆均连接在连接器内且通过连接器固定连接可同步转动,所述间距调节丝杆和间隙限位杆上套有两组移动平台,两组所述移动平台内的螺纹孔尺寸相反。
14.优选的,两组所述移动平台上分别安装有两组码垛夹持机构。
15.优选的,所述自行机构包括驱动机构和可转向调节的车轮用于控制行走控制架在码垛过程中实现移动。
16.与现有技术相比,本发明的有益效果是:
17.1、本方案通过将两组码垛夹持机构安装在行走控制架下方,使得码垛夹持机构可以在行走控制架上进行横向或纵向的移动,使得码垛夹持机构可以将行走控制架下方的货物移动到任意位置进行码垛,并且行走控制架安装在自行机构上,通过自行机构对行走控制架的驱动,使得行走控制架可以在码垛过程中实现移动,从而连续性进行货物的堆叠码垛;
18.2、本方案通过码垛夹持机构可以进行独立的高度调节、角度朝向调节或间距调节,使得两组码垛夹持机构可以对不同大小的或形状的货物进行夹持固定,并移动到目标位置进行堆叠码垛;
19.3、本方案通过码垛夹持机构的结构设置,使得两组码垛夹持机构可以调节成不同造型,从而对不同的货物进行夹持固定,并且可调辅助夹板可以进行角度调节,使得码垛夹持机构对货物进行夹持的同时可以从下方托起,提高稳定性,同时通过气囊的充放气设置,
使得码垛夹持机构对异型货物进行夹持搬运时,可以通过气囊充气后膨胀填充货物和可调辅助夹板之间的缝隙,使得可调辅助夹板可以更好的抵触在货物表面进行夹持;
20.4、本方案通过两组码垛夹持机构的设置,使得两组码垛夹持机构可以对货物夹持固定后,从而不同位置将夹持的货物放下,并且通过码垛夹持机构的结构调节运行,使得货物放下时即使外侧有其他货物阻挡,也可以稳定的将货物缓缓插入其他货物之间,并且保证货物间缝隙较小,提高空间利用率。
附图说明
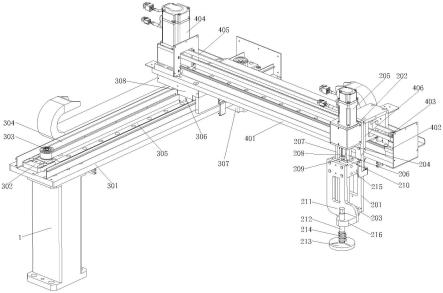
21.图1为本发明结构示意图;
22.图2为本发明结构正视示意图;
23.图3为本发明结构俯视示意图;
24.图4为本发明行走控制架结构示意图;
25.图5为本发明图4中a处结构放大示意图;
26.图6为本发明图4中b处结构放大示意图;
27.图7为本发明码垛夹持机构结构示意图;
28.图8为本发明码垛夹持机构结构后视示意图;
29.图9为本发明码垛夹持机构结构爆炸示意图。
30.图中:1、行走控制架;101、垂直架;102、横延架;103、纵延架;104、纵向丝杆;105、纵向限位杆;106、纵向控制电机;107、纵向滑块;108、横向丝杆;109、横向限位杆;110、横向控制电机;111、横向滑块;112、间距调节丝杆;113、间隙限位杆;114、间距调节电机;115、安装座;116、连接器;117、移动平台;2、码垛夹持机构;201、液压缸;202、升降台;203、转向控制电机;204、固定夹板;205、调节槽;206、转动台;207、转动控制电机;208、安装槽;209、辅助夹板控制电机;210、可调辅助夹板;211、固定槽;212、气囊;213、充放气设备;214、连通管一;215、密封柱筒;216、加压槽;217、密封滑块;218、密封垫;219、吸盘;220、加压设备;221、连通管二;222、凸块;223、摄像头调节电机;224、固定杆;225、视觉摄像头;3、自行机构。
具体实施方式
31.实施例一
32.请参阅图1-9,本发明提供一种技术方案:
33.一种基于机器视觉的工业机器人自动堆叠码垛装置,行走控制架1上安装有两组可以同步横向或纵向移动的码垛夹持机构2,使得两组码垛夹持机构2可以在行走控制架1上移动到行走控制架1下方的任意位置,从而对行走控制架1覆盖区域内的货物进行夹持固定,并转移到任意位置;
34.同时两组码垛夹持机构2可以进行独立的高度调节、角度朝向调节或间距调节,使得两组码垛夹持机构2可以对不同大小的或形状的货物进行夹持固定,并移动到目标位置进行堆叠码垛;
35.行走控制架1包括多组下方安装有自行机构3的垂直架101,并且多组垂直架101横向之间通过上方的横延架102连接,而通过两组平行分布的横延架102可以连接多组垂直架101,同时两组横延架102的侧面连接有两组纵延架103,使得行走控制架1整体形成一个矩
形框架结构,而自行机构3包括驱动机构和可转向调节的车轮,使得行走控制架1可以在码垛过程中实现移动,从而连续性进行货物的堆叠码垛;
36.两组横延架102的中心位置插设有纵向丝杆104,而两组横延架102的两侧插设有两组纵向限位杆105,并且纵向丝杆104和两组纵向限位杆105呈平行分布,同时纵向丝杆104和两组纵向限位杆105之间均安装有纵向滑块107,而两组纵延架103位于两组纵向限位杆105的下方,使得两组纵向限位杆105上安装的纵向滑块107通过纵延架103进行支撑,提高结构的稳定性,同时一组横延架102的表面连接有纵向控制电机106,纵向控制电机106的输出轴和纵向丝杆104传动连接,纵向丝杆104上的纵向滑块107内部设置有螺纹孔与之相适配,使得纵向控制电机106驱动纵向丝杆104在纵向滑块107内转动时,可以控制三组纵向滑块107进行纵向移动,并且随着纵向控制电机106控制纵向丝杆104的转动方向调节,使得三组纵向滑块107可以实现纵向的往复运动;
37.三组纵向滑块107内分别插设有横向丝杆108和横向限位杆109,同时纵向限位杆105上安装的纵向滑块107表面连接有横向控制电机110,横向控制电机110的输出轴和横向丝杆108传动连接,并且横向丝杆108和横向限位杆109的表面安装有两组相适配的横向滑块111,同时两组横向滑块111的型号相同,使得横向控制电机110驱动横向丝杆108在两组横向滑块111内转动时,可以控制两组横向滑块111进行横向的往复运动,并且两组横向滑块111横向运动同步,进一步可以对两组横向滑块111进行横向位置调节;
38.而两组横向滑块111之间均插设有半截的间距调节丝杆112和间隙限位杆113,两组横向滑块111上均安装有间距调节电机114并且间距调节电机114的输出轴和间距调节丝杆112传动连接,同时两组横向滑块111上安装的间距调节丝杆112、间隙限位杆113和间距调节电机114呈镜像分布,使得一组横向滑块111上的间距调节丝杆112和间隙限位杆113分别和另一组横向滑块111上的间隙限位杆113和间距调节丝杆112对齐,同时位于纵向丝杆104上安装的纵向滑块107下方表面连接有两组安装座115,并且两组安装座115内均插设有连接器116,而呈同心圆分布的两组间距调节丝杆112和间隙限位杆113均连接在连接器116内,并且通过连接器116固定连接可同步转动,使得两组横向滑块111上的间距调节电机114可以驱动两组间距调节丝杆112独立转动且互不影响;
39.而间距调节丝杆112和间隙限位杆113上套有两组移动平台117,并且两组移动平台117位于纵向丝杆104上的纵向滑块107两侧,使得两组纵向滑块107可以被分开,同时两组移动平台117内的螺纹孔尺寸相反,使得两组间距调节电机114同步驱动间距调节丝杆112转动时,两组移动平台117的移动方向相反,进一步使得两组移动平台117的间距可以进行调节;
40.两组码垛夹持机构2分别安装在两组移动平台117上,通过行走控制架1的结构运行,可以对两组码垛夹持机构2在行走控制架1上方的横向位置或纵向位置进行任意调节,进一步使得两组码垛夹持机构2的间距也可以进行调节,从而对不同位置或不同大小的货物进行搬运。
41.码垛夹持机构2包括连接在移动平台117上的液压缸201,液压缸201的活塞杆向下贯穿移动平台117连接有升降台202,通过液压缸201驱动升降台202进行上升,可以改变固定夹板204的高度,升降台202的内部连接有转向控制电机203,转向控制电机203的输出轴和固定夹板204固定连接,使得转向控制电机203驱动固定夹板204转动时,可以改变码垛夹
持机构2的朝向;
42.固定夹板204的两侧均设置有调节槽205,并且调节槽205内通过轴铰接有转动台206,而固定夹板204的上端表面连接有转动控制电机207,转动控制电机207的输出轴和安装转动台206的轴传动连接,使得转动控制电机207可以驱动转动台206在固定夹板204上转动,而可调辅助夹板210安装在转动台206上,通过转动台206的角度调节,使得可调辅助夹板210和固定夹板204之间可以进行角度调节,并且两组可调辅助夹板210在固定夹板204上均可独立调节,使得固定夹板204上方安装的两组可调辅助夹板210和固定夹板204可以形成任意形状,如“u”型、“l”型或直线型等,进一步使得一组码垛夹持机构2可以根据搬运的货物形状,进行相适配的调节,使得固定夹板204和可调辅助夹板210均可抵触在货物的表面,实现更好的接触,从而通过两组码垛夹持机构2可以更好的对不同形状或大小的货物进行夹持固定;
43.转动台206的内部设置有安装槽208,并且安装槽208内连接有辅助夹板控制电机209,辅助夹板控制电机209的输出轴和可调辅助夹板210传动连接,使得可调辅助夹板210相对固定夹板204进行角度调节的过程中,可以对可调辅助夹板210自身倾斜的进行调节,从而使得可调辅助夹板210可以更好的叠合货物的表面,如货物的侧面为向下的斜面,通过可调辅助夹板210由上往下倾斜,使得码垛夹持机构2对货物进行夹持的过程中,除了外侧的夹力还有下方的支撑,可以避免货物在夹持过程中发生脱落;
44.并且通过两组可调辅助夹板210的独立调节,进一步使得码垛夹持机构2对货物夹持的方式具有多样性,从而提高适用性;
45.并且可调辅助夹板210的表面设置有等距离线性分布的固定槽211,每组固定槽211内均安装有气囊212,同时可调辅助夹板210的背面安装有充放气设备213,气囊212均通过连通管一214和充放气设备213连通,使得充放气设备213可以对气囊212内进行充气,使得可调辅助夹板210的表面具有多个气囊212凸起,进一步使得码垛夹持机构2对货物进行夹持时,可调辅助夹板210可以提高夹持时的摩擦力,使得货物可以更好的进行夹持,并且通过气囊212的充放气设置,使得码垛夹持机构2对异型货物进行夹持搬运时,可以通过气囊212充气后膨胀填充货物和可调辅助夹板210之间的缝隙,使得可调辅助夹板210可以更好的抵触在货物表面进行夹持;
46.固定夹板204的背面连接有两组对称分布的密封柱筒215,并且两组密封柱筒215内均设置有加压槽216,加压槽216内插设有可滑动的密封滑块217,并且密封滑块217的背面连接有密封垫218,密封垫218和加压槽216相适配,使得密封垫218可以对加压槽216内进行密封,同时固定夹板204的背面连接有加压设备220,加压设备220通过连通管二221和加压槽216内相连通,当加压设备220未开启时密封滑块217缩入加压槽216内,当加压设备220开启后会向加压槽216内加压,使得压力推动密封垫218滑动,进一步使得密封滑块217从加压槽216内伸出,使得密封滑块217表面的吸盘219伸出抵触在货物的表面;
47.当码垛夹持机构2对货物进行堆叠码垛时,随着货物码垛的数量,使得货物堆叠后外侧可能会存在其他货物,导致货物的外侧面均有阻挡,而码垛夹持机构2对货物进行夹持时,必然在货物的外侧凸出,无法将货物稳定的插入码垛中,若直接方向会产生较大的摔落,容易对货物发生损坏,为此本装置可以可以码垛的进程进行不同的设置,具体如下:
48.当码垛点没有其他货物,通过码垛夹持机构2对货物进行夹持后,行走控制架1对
码垛夹持机构2进行驱动移动,使得码垛夹持机构2移动到目标点,再通过液压缸201驱动固定夹板204下降,使得两组码垛夹持机构2同步运行可以将货物稳定放下;
49.当码垛点有一个货物,通过码垛夹持机构2对货物进行夹持后需要货物放在此货物一侧时,通过两组码垛夹持机构2中的转向控制电机203同步运行,可以对两组固定夹板204的朝向进行调节,进一步使得码垛夹持机构2可以将货物暴露的一面朝向以存在的货物一面,使得码垛夹持机构2不位于两组货物之间,进一步使得两组货物之间间隙较小,提高空间利用率,再通过码垛夹持机构2运行可以将货物稳放下;
50.当码垛点有俩个货物时,通过码垛夹持机构2对货物进行夹持后需要货物放在两组货物之间时,可采用上述方法;
51.当码垛点有俩个货物时,且俩个货物不相邻,通过码垛夹持机构2对货物进行夹持后需要货物放在两组货物之间,且同时和两组货物接触形成“l”状时,可先通过两组码垛夹持机构2进行转动,在通过两组码垛夹持机构2调节呈“v”状,使得两组码垛夹持机构2可以从侧边将货物移动到目标上方,再缓缓转动可调辅助夹板210减少倾斜度,使得货物被缓缓落下,并且在放下时一组码垛夹持机构2下方存在货物,无法完全放下,可加压设备220相加压槽216内加压,使得吸盘219伸出抵触在货物表面,进行吸附固定,使得货物在下滑时速度被缓减,结合另一组码垛夹持机构2对货物的夹持,使得货物可以稳定放下;
52.当码垛点有三个或四个货物时,需要将码垛夹持机构2夹持的货物放在多个货物之间时,可采用上述方法。
53.固定夹板204的背面设置有凸块222,凸块222的表面连接有摄像头调节电机223,摄像头调节电机223的输出轴上连接有固定杆224,固定杆224的下端连接有视觉摄像头225,通过摄像头调节电机223驱动固定杆224转动,使得视觉摄像头225可以从固定夹板204的下端伸出,当码垛夹持机构2对货物进行夹持时,可先通过视觉摄像头225对货物进行定位,从而是码垛夹持机构2可以从更好的角度或状态对不同现状或大小的货物进行夹持固定,提高夹持时的稳定性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。