1.本发明属于直升机航电调试领域,一种用于直升机舵机位移检测装置及方法。
背景技术:
2.在地面调试某型号直升机飞控系统时,需要检查联动轴舵机的伸缩极性,直升机联动轴舵机的伸缩极性决定了直升机飞控系统的稳定性,是影响飞行安全的重要因素之一。传统检测方法只能通过目测来判断舵机伸缩极性,当舵机伸缩量较小时,目测已无法准确判断舵机伸缩极性,错判、误判风险较高,对直升机飞行安全造成极大隐患。
技术实现要素:
3.针对传统的直升机联动轴舵机位移伸缩极性测量方法的缺点,本发明提供一种精确测量直升机联动轴舵机位移伸缩极性的装置。通过简单的安装舵机激光位移传感器,即可通过液晶屏实时显示当前舵机位移量,然后通过判断位移量的变化情况即得出舵机位移伸缩极性。
4.技术方案
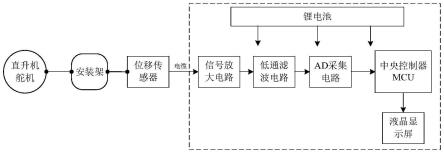
5.一种用于直升机舵机位移测量的装置,包括中央控制器mcu、液晶显示屏、低通滤波电路、信号放大电路、ad采集电路和锂电池;锂电池分别给低通滤波电路、信号放大电路、ad采集电路、中央控制器mcu、液晶显示屏供电。
6.信号放大电路将位移传感器输出的小电流信号放大后传输至低通滤波电路,低通滤波电路将信号中高于1khz的杂波信号滤除,然后将干净的位移信号传输至ad采集电路,ad采集电路将模拟信号转换成数字信号传输至中央控制器mcu;中央控制器mcu经过计算后将计算结果显示在液晶显示屏上。
7.进一步的,信号放大电路包括位移传感器输入接口和以lm358为核心的电流检测及放大电路。
8.进一步的,lm358的引脚8连接dc 5v,同时连接100nf电容c27到agnd,lm358的引脚4连接agnd,lm358的引脚1连接50kω电阻r25的1脚,同时该连接100ω电阻r27,r25的2脚连接agnd,r272脚连接22nf电容c33的1脚,同时连接三极管t1的基极,c33的2脚连接dc 5v,lm358的引脚2连接三极管t1的发射极,同时连接100ω电阻r26的1脚,r26的2脚连接3kω电阻r31的1脚,同时连接15nf电容c28和c31的相连端,r31的2脚连接agnd;lm358的引脚3连接100kω电阻r15的1脚,同时连接68.1kω电阻r16的1脚,r152脚接agnd,r16的2脚连接c28的2脚,同时接100pf电容c30的1脚,同时与位移传感器输入接口的2脚、3脚、4脚、5脚短接至dc 5v;c30的2脚、c31的2脚与位移传感器输入接口的1脚短接,同时连接至三极管t1的集电极,同时连接10uh电感l10的1脚,l10的2脚连接二极管d8的阳极,d8的阴极作为信号放大电路的输出端连接至低通滤波电路的输入端。
9.进一步的,三极管t1型号为s9013。
10.进一步的,低通滤波电路是以lm358为核心搭建截止频率为1khz的低通滤波器,可
将1khz以上的杂波信号滤除;
11.进一步的,lm358的引脚6连接50kω电阻r32的1脚,r322脚连接lm358的引脚7,r32两端并联20pf的电容c34,lm358的引脚6与c34、r32的公共节点连接到3kω电阻r30的1脚,r30的2脚链接到agnd,lm358的引脚7连接1kω电阻r33的1脚,r33另外1脚作为低通滤波电路的输出口连接到ad采集输入端,lm358的引脚5连接20pf电容到agnd,同时引脚5连接100kω电阻r35的1脚,该节点继续连接300kω电阻r34的1脚,r352脚连接二极管d12的阳极,d12的阴极接agnd,r34的2脚连接100nf电容c37,该节点作为低通滤波电路的输入端连接到信号放大电路的输出端,c372脚连接dc 5v。
12.进一步的,ad采集电路包括16位a/d转换器ltc1864和4.096v的电压基准芯片ref3140。
13.进一步的,ref3140引脚1连接dc 5v,引脚3连接agnd,引脚2与引脚3之间并联一个100nf电容c36,引脚2同时与ltc1864的引脚1连接;ltc1864引脚1连接100nf电容c42到agnd,引脚2连接10nf电容c2到agnd,同时引脚2连接100ω的电阻r3的1脚,r32脚连接二极管d3的阳极并且连接至低通滤波电路r33的输出引脚,二极管d3的阴极接dc 5v,ltc1864的引脚3与引脚4短接并接入agnd,ltc1864的引脚5作为ad sdi功能连接stm32l151rc的23引脚,引脚6作为ad sdo功能连接stm32l151rc的22引脚,引脚7作为ad sck功能连接stm32l151rc的21引脚,ltc1864的引脚8连接100nf电容c43到agnd,同时连接dc 5v。
14.进一步的,中央控制器mcu型号是32位单片机stm32l151rc。
15.一种用于直升机舵机位移检测方法,包括如下步骤:
16.1、将位移传感器使用2个螺钉固定在安装架上面,然后将安装架通过卡口固定在直升机舵机前方的轴体上,使位移传感器测量面中心正对舵机位移面中心,然后使用电缆将位移传感器与舵机位移测量装置连接,打开舵机位移测量装置的电源开关;
17.2、位移传感器将位移传感器测量面与舵机位移面的距离x转换成频率为0-1khz、电流值为4ma-10ma的交流信号,并将交流信号通过电缆传输至舵机位移测量装置内部的信号放大电路;
18.3、信号放大电路将频率为0-1khz、电流值为4ma-10ma的交流电流信号转换成频率为0-1khz、电压为10v-20v的交流电压信号,并将交流电压信号及电路中的高频杂波一起传输至低通滤波电路;
19.4、低通滤波电路将1khz以上的高频杂波滤除,通过1kω的限流电阻r33将频率为0-1khz、电压为10v-20v的交流电压信号转换成频率为0-1khz、电压为2v-5v的交流电压信号,并将该信号传输至ad采集电路;
20.5、ad采集电路将位移交流电压信号转换成数字信号,并将数字信号传输至中央控制器mcu;
21.6、中央控制器mcu将数字信号计算得出位移传感器测量面与舵机位移面的距离x,中央处理器mcu将当前时刻计算得到的距离值减去上一时刻计算得到的距离值,若结果为正,则输出舵机位移伸缩极性为正向;若结果为负,则输出舵位移伸缩极性为反向。同时将位移数据和舵机伸缩极性通过串口发送至液晶显示屏,并以文字的形式进行显示。
22.技术效果
23.本发明提供一种精确测量直升机联动轴舵机位移伸缩极性的装置。通过简单的安
装舵机激光位移传感器,即可通过液晶屏实时显示当前舵机位移量,然后通过判断位移量的变化情况即得出舵机位移伸缩极性。装置安装方式简单、可靠,检测结果准确、精度较高,装置便携、易于操作、使用。
附图说明
24.图1系统框图;
25.图2激光位移传感器支架正视图、侧视图;
26.图3安装俯视图;
27.图4ad采集电路;
28.图5低通滤波电路;
29.图6信号放大电路。
具体实施方式
30.下面结合实施例对本发明作进一步描述。以下所述仅为本发明一部分实施例,非全部实施例。基于本发明实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.具体实施时,将激光位移传感器通过安装支架(图2所示)固定在直升机舵机输出轴上,确保激光位移传感器端面与直升机舵机端面保持水平,开启装置的电源开关,液晶显示屏即可实时显示激光位移传感器端面与直升机舵机端面的距离,即图3安装俯视图中的x,精度为
±
0.01mm,当舵机移动时,即可显示出舵机位移方向(正向或反向)。
32.用于直升机舵机位移测量的装置,包括中央控制器mcu、液晶显示屏、低通滤波电路、信号放大电路、ad采集电路和锂电池;锂电池分别给低通滤波电路、信号放大电路、ad采集电路、中央控制器mcu、液晶显示屏供电。
33.信号放大电路将位移传感器输出的小电流信号放大后传输至低通滤波电路,低通滤波电路将信号中高于1khz的杂波信号滤除,然后将干净的位移信号传输至ad采集电路,ad采集电路将模拟信号转换成数字信号传输至中央控制器mcu;中央控制器mcu经过计算后将计算结果显示在液晶显示屏上。
34.信号放大电路包括位移传感器输入接口和以lm358为核心的电流检测及放大电路,lm358的引脚8连接dc 5v,同时连接100nf电容c27到agnd,lm358的引脚4连接agnd,lm358的引脚1连接50kω电阻r25的1脚,同时该连接100ω电阻r27,r25的2脚连接agnd,r272脚连接22nf电容c33的1脚,同时连接三极管t1(型号为s9013)的基极,c33的2脚连接dc 5v,lm358的引脚2连接三极管t1的发射极,同时连接100ω电阻r26的1脚,r26的2脚连接3kω电阻r31的1脚,同时连接15nf电容c28和c31的相连端,r31的2脚连接agnd;lm358的引脚3连接100kω电阻r15的1脚,同时连接68.1kω电阻r16的1脚,r152脚接agnd,r16的2脚连接c28的2脚,同时接100pf电容c30的1脚,同时与位移传感器输入接口的2脚、3脚、4脚、5脚短接至dc 5v;c30的2脚、c31的2脚与位移传感器输入接口的1脚短接,同时连接至三极管t1的集电极,同时连接10uh电感l10的1脚,l10的2脚连接二极管d8的阳极(型号为1n4148),d8的阴极作为信号放大电路的输出端连接至低通滤波电路的输入端。
35.低通滤波电路是以lm358为核心搭建截止频率为1khz的低通滤波器,可以将1khz
以上的杂波信号滤除;lm358的引脚6连接50kω电阻r32的1脚,r322脚连接lm358的引脚7,r32两端并联20pf的电容c34,lm358的引脚6与c34、r32的公共节点连接到3kω电阻r30的1脚,r30的2脚链接到agnd,lm358的引脚7连接1kω电阻r33的1脚,r33另外1脚作为低通滤波电路的输出口连接到ad采集输入端,lm358的引脚5连接20pf电容到agnd,同时引脚5连接100kω电阻r35的1脚,该节点继续连接300kω电阻r34的1脚,r352脚连接二极管d12(型号为1n4148)的阳极,d12的阴极接agnd,r34的2脚连接100nf电容c37,该节点作为低通滤波电路的输入端连接到信号放大电路的输出端,c372脚连接dc 5v。
36.ad采集电路包括16位a/d转换器ltc1864(图4中的u14)和4.096v的电压基准芯片ref3140(图4中的u8),ref3140引脚1连接dc 5v,引脚3连接agnd,引脚2与引脚3之间并联一个100nf电容c36,引脚2同时与ltc1864的引脚1连接;ltc1864引脚1连接100nf电容c42到agnd,引脚2连接10nf电容c2到agnd,同时引脚2连接100ω的电阻r3的1脚,r32脚连接二极管d3(型号为1n5819)的阳极并且连接至低通滤波电路r33的输出引脚,二极管d3的阴极接dc 5v,ltc1864的引脚3与引脚4短接并接入agnd,ltc1864的引脚5作为ad sdi功能连接stm32l151rc的23引脚,引脚6作为ad sdo功能连接stm32l151rc的22引脚,引脚7作为ad sck功能连接stm32l151rc的21引脚,ltc1864的引脚8连接100nf电容c43到agnd,同时连接dc 5v。
37.中央控制器mcu型号是32位单片机stm32l151rc。
38.一种用于直升机舵机位移检测方法,包括如下步骤:
39.1、将位移传感器使用2个螺钉固定在安装架上面,然后将安装架通过卡口固定在直升机舵机前方的轴体上,使位移传感器测量面中心正对舵机位移面中心,然后使用电缆将位移传感器与舵机位移测量装置连接,打开舵机位移测量装置的电源开关;
40.2、位移传感器将位移传感器测量面与舵机位移面的距离x(图3所示)转换成频率为0-1khz、电流值为4ma-10ma的交流信号,并将交流信号通过电缆传输至舵机位移测量装置内部的信号放大电路;
41.3、信号放大电路将频率为0-1khz、电流值为4ma-10ma的交流电流信号转换成频率为0-1khz、电压为10v-20v的交流电压信号,并将交流电压信号及电路中的高频杂波一起传输至低通滤波电路;
42.4、低通滤波电路将1khz以上的高频杂波滤除,通过1kω的限流电阻r33(图5所示)将频率为0-1khz、电压为10v-20v的交流电压信号转换成频率为0-1khz、电压为2v-5v的交流电压信号,并将该信号传输至ad采集电路;
43.5、ad采集电路将位移交流电压信号转换成数字信号,并将数字信号传输至中央控制器mcu;
44.6、中央控制器mcu将数字信号计算得出位移传感器测量面与舵机位移面的距离x(图3所示),中央处理器mcu将当前时刻计算得到的距离值减去上一时刻计算得到的距离值,若结果为正,则输出舵机位移伸缩极性为正向;若结果为负,则输出舵位移伸缩极性为反向。同时将位移数据和舵机伸缩极性通过串口发送至液晶显示屏,并以文字的形式进行显示。
45.本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还
应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。