1.本实用新型涉及自动化设备领域,具体涉及一种物料转接装置。
背景技术:
2.目前应用自动化机械自动拆卸和安装港口集装箱的锁钮(集装箱角件处的固定连接件,也作钮锁)代替人工拆装作业,开始逐步普及,但是在拆卸锁钮后或者安装锁钮前,需要对锁钮进行一系列操作,确保拆卸锁钮后锁舌位置能放入物料托盘;安装锁钮前,需要确保锁舌位置能够与锁座正确配合。如果使用拆卸和安装的机器人完成这一系列操作,则在拆卸锁钮后或安装锁钮前,运送集装箱的集卡需要等待一段时间,大大增加整个拆卸作业时间。
技术实现要素:
3.本实用新型的目的,就是为了解决上述问题而提供了一种物料转接装置,能有效地实现物料转接,减少自动化设备间物料转接时间,也可以增加整理机构对需要特定放置存取的物理进行整理。
4.本实用新型的目的是这样实现的:
5.本实用新型的一物料转接装置包括:
6.一可在三维空间内运动的移载机和一安装于该移载机并在其驱动下在三维空间内运动的夹爪机构;
7.夹爪机构包括一夹爪组件和一驱动该夹爪组件开合的夹爪驱动组件。
8.上述的物料转接装置中移载机包括设置于xyz坐标体系中的一x轴滑移机构、一安装于x轴滑移机构上并通过该x轴滑移机构传动的y轴滑移机构和一安装于y轴滑移机构并通过该y轴滑移机构传动的z轴滑移机构,其中夹爪机构安装于z轴滑移机构上并在该z轴滑移机构的驱动下沿z轴方向运动。
9.上述的物料转接装置中x轴滑移机构包括:
10.至少一个平行于xy平面的设置的x向滑轨,每个x向滑轨上对应设置若干滑块和一平行设置于一个x向滑轨一旁的x向驱动组件;
11.上述的物料转接装置中x向滑轨和x向驱动组件都固定安装于一x向底座上,x向底座为矩形框状的板材;和/或,
12.x向驱动组件为通过一x轴向驱动电机传动,x轴向驱动电机的电机转轴与x向驱动组件通过一联轴器连接,x轴向驱动电机和x向驱动组件间还设置一x向电机固定座连接;和/或,
13.x向驱动组件一旁设置有若干x向位置传感器,每个x向位置传感器设置于一x向传感器支架上。
14.上述的物料转接装置中y轴滑移机构包括:
15.一平行于yz平面设置的y向底座,该y向底座固定安装于至少一个x向滑轨的滑块
上,该y向底座通过一连接座与x向驱动组件的传动件连接;
16.沿y轴方向设置并固定于y向底座的一安装面上的至少一个y向滑轨和一y向驱动组件,每个y向滑轨上配套有若干滑块,y向驱动组件设有传动块;以及
17.y向驱动组件通过一y轴向驱动电机传动,该y向驱动组件与y轴向驱动电机间通过一第一减速器传动
18.上述的物料转接装置中z轴滑移机构包括一平行xy平面的z向底座,该z向底座一侧面与两个y轴向滑轨的滑块以及y向驱动组件的传动块连接;
19.z向底座的另一侧面沿z轴方向设置有两个z向滑轨和一z向驱动组件,每个z向滑轨上配套有若干滑块,z向驱动组件设有传动块;
20.z向驱动组件通过一z轴向驱动电机传动,z向驱动组件与z轴向驱动电机间通过一第二减速器传动;
21.上述的物料转接装置中两个z向滑轨或z向驱动组件中的一个的一旁设置有若干z向传感器,每个z向传感器安装于z向传感器支架上并安装于z向底座上。
22.上述的物料转接装置中夹爪组件包括:
23.一平行于xy平面设置的夹爪底板;
24.两个固定安装于夹爪底板的夹爪滑轨;
25.两个相对设置的夹爪,每个夹爪的顶部都滑动安装于两个夹爪滑轨上;
26.两个分别与夹爪连接用以传动夹爪沿夹爪滑轨滑动以实现开合的连杆,夹爪顶部设有耳板,连杆于耳板铰接;
27.一连接块,该连接块可转动地与两个连杆连接;以及
28.一夹爪传感组件,该夹爪传感组件安装于夹爪底板上用以监测一个夹爪的水平滑动状态以获取两个夹爪的开合状态。
29.上述的物料转接装置中夹爪驱动组件包括:
30.一平行于yz平面设置的夹爪驱动安装板;
31.一侧面固定安装于z向滑轨的滑块以及z向驱动组件的传动块上;
32.一沿z轴方向固定安装于夹爪驱动安装板的另一侧面的夹爪驱动滑轨,该夹爪驱动滑轨上配套有若干滑块;
33.一平行夹爪驱动滑轨设置的夹爪驱动丝杠,该夹爪驱动丝杠配套一传动块,夹爪驱动丝杠两端分别通过丝杠支撑座安装于夹爪驱动安装板上;
34.一安装于夹爪驱动安装板上的夹爪驱动电机,该夹爪驱动电机的输出轴与夹爪驱动丝杠之间通过一联轴器连接,连接块的一侧面与夹爪驱动滑轨的滑块以及夹爪驱动丝杠的传动块固定连接。
35.上述的物料转接装置中x轴滑移机构、y轴滑移机构和z轴滑移机构的电气线路通过拖链安装;和/或,
36.x轴滑移机构、y轴滑移机构和z轴滑移机构中的滑轨都设有风琴罩。
37.本实用新型物料转接装置可以提高集装箱卡车拆装锁钮工作过程中物料中转效率,大大提高了港口的经济效益,本实用新型结构简单,可靠性高。
附图说明
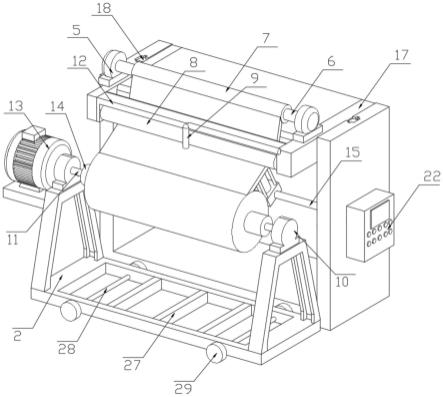
38.图1是本实用新型物料转接装置的结构示意图;
39.图2是本实用新型的x轴滑移机构的结构示意图;
40.图3是本实用新型的y轴滑移机构的结构示意图;
41.图4是本实用新型的z轴滑移机构的结构示意图;
42.图5是本实用新型的夹爪机构的结构示意图。
具体实施方式
43.下面将结合附图,对本实用新型作进一步说明。
44.请参阅图1至图5,图中示出了本实用新型的物料转接装置,其包括一可在三维空间内运动的移载机1和一安装在该移载机1上并在其驱动下在三维空间内运动的夹爪机构2;
45.该夹爪机构2包括:一夹爪组件3和一驱动该夹爪组件3开合的夹爪驱动组件4。
46.本实施例中,移载机1包括分别设置于xyz坐标体系中的x轴滑移机构5、y轴滑移机构6和z轴滑移机构7,其中夹爪机构2安装于z轴滑移机构7上并在该z轴滑移机构7的驱动下沿z轴方向运动;
47.本实施例中,x轴滑移机构5包括:
48.两个平行于xy平面设置的x向滑轨51,每个x向滑轨51上对应设置若干滑块和一平行设置于一个x向滑轨51旁的x向驱动组件52;
49.进一步的,
50.x向滑轨51和x向驱动组件52都固定安装于一x向底座53上,优选的,x向底座53为矩形框状的板材;
51.x向驱动组件52为丝杠组件并通过一x轴向驱动电机54传动,优选的,x轴向驱动电机54的电机转轴通过一联轴器55与x向驱动组件52的丝杠连接;
52.x轴向驱动电机54和x向驱动组件52间通过一x向电机固定座56连接;
53.x向驱动组件52一旁设置有若干x向位置传感器57,每个x向位置传感器57设置于一x向传感器支架58上;
54.x轴滑移机构5的信号和供电线缆(图中未示出)通过拖链固定,拖链设置于一拖链支架59上,进一步的,拖链支架59固定连接在x向底座53上。
55.y轴滑移机构6包括:
56.一平行于yz平面设置的y向底座61,该y向底座61前、后边缘分别固定安装于两个x向滑轨51的滑块上,该y向底座61通过一连接座62与x向驱动组件52的传动件连接;
57.沿y轴方向设置并固定于y向底座61一安装面上的两个y向滑轨63和一y向驱动组件64,每个y向滑轨63上配套有若干滑块,y向驱动组件64设有传动块;
58.进一步的,y向驱动组件64通过一y轴向驱动电机65传动,优选的,y向驱动组件64与y轴向驱动电机65间通过一第一减速器66传动;
59.y轴滑移机构6信号和供电线缆(图中未示出)通过拖链固定;
60.z轴滑移机构7包括:
61.一竖向设置的z向底座71,该z向底座71一侧面与两个y轴向滑轨63上的滑块以及y
向驱动组件64的传动块连接;
62.z向底座71的另一侧面沿z轴方向设置有两个z向滑轨72和一z向驱动组件73,每个z向滑轨72上配套有若干滑块,z向驱动组件73设有传动块;
63.进一步的,z向驱动组件73通过一z轴向驱动电机74传动,优选的,z向驱动组件73与z轴向驱动电机74间通过一第二减速器75传动;
64.z轴滑移机构7信号和供电线缆(图中未示出)通过拖链固定;
65.两个z向滑轨72或z向驱动组件73中的一个的一旁设置有若干z向传感器76,每个z向传感器76安装于z向传感器支架77上并与z向底座71连接;
66.夹爪组件3包括:
67.一平行于xy平面设置的的夹爪底板31;
68.两个固定安装于夹爪底板31的夹爪滑轨32;
69.两个相对设置的夹爪33,每个夹爪33的顶部都滑动安装于两个夹爪滑轨32上;
70.两个分别与夹爪33连接用以传动夹爪33沿夹爪滑轨32滑动以实现开合的连杆34,优选的,夹爪33顶部设有耳板33a,连杆34与耳板33a铰接;
71.一连接块35,该连接块35可转动地与两个连杆34连接,优选的,连接块35底部开设槽形口35a,两个连杆34的上端分别通过铰接方式安装于槽形口35a中;
72.一夹爪传感组件36,该夹爪传感组件36安装于夹爪底板31上用以监测一个夹爪33的水平滑动状态,进而获取两夹爪33的开合状态。
73.夹爪驱动组件4包括:
74.一平行于yz平面设置的夹爪驱动安装板41,该夹爪驱动安装板41的底边与夹爪底板31固定连接,一侧面固定安装于z向滑轨72上的滑块以及z向驱动组件73的传动块;
75.一沿z轴方向固定安装于夹爪驱动安装板41的另一侧面的夹爪驱动滑轨42,该夹爪驱动滑轨42上配套有若干滑块;
76.一平行于夹爪驱动滑轨42设置的夹爪驱动丝杠43,该夹爪驱动丝杠43配套有一传动块,其两端通过丝杠支撑座44安装于夹爪驱动安装板41上;
77.一安装于夹爪驱动安装板41上的夹爪驱动电机45,该夹爪驱动电机45的输出轴与夹爪驱动丝杠43之间通过一联轴器46连接,连接块35一侧面与夹爪驱动滑轨42的滑块以及夹爪驱动丝杠43的传动块固定连接。
78.本实用新型用于集装箱锁钮8的转接流程如下:
79.通过作业现场一视觉定位系统配合对待转接的锁钮8定位并将锁钮8的位置信息传递至一控制系统,该控制系统输出指令至移载机1的x轴滑移机构5、y轴滑移机构6和z轴滑移机构7分别在x轴向驱动电机54、y轴向驱动电机65和z轴向驱动电机74的驱动下将夹爪组件3移动至待转接锁钮8上方,此时夹爪33为打开状态,z轴向驱动电机74继续驱动夹爪组件3移动至夹取工位,夹爪驱动电机45驱动夹爪33合拢以夹住锁钮8的肩部,如果夹取失败,则夹爪驱动电机45驱动夹爪33打开,利用视觉定位系统校正锁钮8的位置后重复上述夹取锁钮8动作。
80.完成锁钮8夹取后,移载机1的x轴滑移机构5、y轴滑移机构6和z轴滑移机构7在控制系统的指令下将锁钮8移动至交接位,可将锁钮8释放存储至一锁钮8存储机构,也可以将锁钮8释放转交一锁钮拆装夹具。
81.本实用新型的视觉定位系统和控制系统可利用原作业现场的现有设备,控制系统的执行程序写入作业现场的机械臂控制器中或者作业现场的集成控制器中。
82.以上实施例仅供说明本实用新型之用,而非对本实用新型的限制,有关技术领域的技术人员,在不脱离本实用新型的精神和范围的情况下,还可以作出各种变换或变型,因此所有等同的技术方案也应该属于本实用新型的范畴,应由各权利要求所限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。