1.本技术涉及蜂窝结构技术领域,尤其涉及一种矩形蜂窝结构面内等效力学性能的弹塑性分析方法。
背景技术:
2.蜂窝结构是由一个个正六边形单房、房口全朝下或朝向一边、背对背对称排列组合而成的一种结构,其结构优美、形状对称,而且具有比强度高、比刚度大的特点,它能以较少的材料承受较大的受力,而其重量却轻70~90%。此外,蜂窝结构还具有隔音、隔热、减震、吸能等诸多优良性能,因而蜂窝结构被广泛应用于建筑、交通、机械工程、航空航天、化学生物工程等各个领域。
3.在此背景下,本发明提出一种矩形蜂窝结构面内等效力学性能的弹塑性分析方法。针对结构的受力方向、实际变形及结构参数,建立反映同一种矩形蜂窝结构本构关系的弹塑性分析方法。最后通过本文提出的分析方法提供一种计算设备和至少一种系统,至少一种可执行指令的定序列表程序。本发明的分析方法建立在求解一系列方程的基础上,相比于传统数值方法和实验方法,具有高效且经济的优点,能为相关行业的企业,提供便捷的设计、优化方案,缩短产品设计周期。
技术实现要素:
4.本发明提出一种矩形蜂窝结构面内等效力学性能的弹塑性分析方法,相比于传统数值方法和实验方法,具有高效且经济的优点,能为相关行业的企业,提供便捷的设计、优化方案,缩短产品设计周期。
5.本发明的上述技术目的是通过如下方案实现的:
6.一种矩形蜂窝结构面内等效力学性能的弹塑性分析方法,包括如下步骤:
7.获取代表胞元;
8.根据所述代表胞元,利用结构对称性确定四分之一简化结构;
9.根据所述简化结构在不同方向的载荷承受情况,对简化结构加以边界约束,确定作用在所述结构壁板上的轴力、剪力以及弯矩方程;
10.根据所述轴力、剪力以及弯矩方程,利用虚功原理及弹塑性理论确定所述四分之一简化结构关键截面不同方向上的位移;
11.根据所述位移,确定简化结构的应变,进而确定代表胞元及整体结构的等效应变及等效应力;
12.根据所述等效应变及等效应力,确定结构的等效杨氏模量及等效泊松比。
13.优选地,当结构处于弹性阶段时且仅受x方向上的力时,其等效泊松及等效杨氏模量比可由式(1)表示:
[0014][0015]
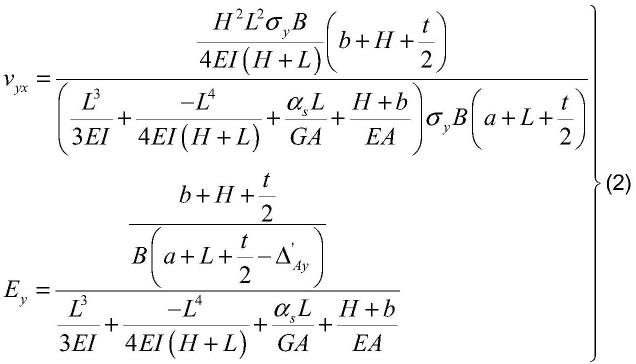
当结构处于弹性阶段时且仅受y方向上的力时,其等效泊松及等效杨氏模量由式(2)表示:
[0016]
。
[0017]
优选地,当结构处于塑性阶段时且仅受x方向上的力时,其等效泊松比及等效杨氏模量可由式(3)表示:
[0018][0019]
当结构处于塑性阶段时且仅受y方向上的力时,其等效泊松比及等效杨氏模量可由式(4)表示:
[0020]
。
[0021]
优选地,结构在其他方向受力时,叠加计算x方向与y方向受力。
[0022]
本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时,实现如权利要求1至4中任一项所述的方法。
[0023]
本发明还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如权利要求1至4中任一项所述的方法。
[0024]
相对于现有技术,本发明具有如下优点:
[0025]
首先,将周期排列的矩形蜂窝结构看作一种各向异性材料,在结构中截取一个代表胞元进行力学分析。在对胞元结构进行力学分析时,可将应力等效为集中力作用在结构对称点处,这样做的好处是方便计算结构面内轴力、剪力及弯矩。其次,利用对称性原理可获得四分之一简化受力结构,此时受力结构为结构力学中的超静定结构,考虑了壁板轴向变形、剪切变形及弯曲变形,运用虚功原理可以求出结构壁板轴力、剪力及弯矩。最后,由卡式第二定理及结构内力可求出四分之一简化结构关键壁板截面的位移,进而获得结构胞元的等效位移。等效位移可以用于求等效应变及等效应力,故可以获得等效杨氏模量和等效泊松比。值得注意的是,本发明提出的一种矩形蜂窝结构面内等效力学性能的弹塑性分析方法,之所以是弹塑性分析方法,其原因在于考虑了结构的屈服极限,对四分之一简化结构进行受力分析时,可以得到结构的塑性点。因此结构变形过程会出现弹性阶段及塑性阶段。利用有限元模型验证本发明方法的有效性,并结合参数分析研究了结构几何参数和结构材料参数对矩形蜂窝结构的面内等效力学性能的影响;通过参数分析可以直观了解结构关键参数对结构弹性-塑性过程的影响。本文通过提出的分析方法提供一种计算设备和至少一种系统,至少一种可执行指令的定序列表程序。本发明的分析方法建立在求解一系列方程的基础上,相比于传统数值方法和实验方法,具有高效且经济的优点,能为相关行业的企业,提供便捷的设计、优化方案,缩短产品设计周期。
附图说明
[0026]
附图用来提供对本技术技术方案的进一步理解,并且构成说明书的一部分,与本技术的实施例一起用于解释本技术的技术方案,并不构成对本技术技术方案的限制。
[0027]
图1为本发明具体实施方式中矩形蜂窝结构示意图;
[0028]
图2为本发明具体实施方式中胞元基本计算参数示意图;
[0029]
图3为本发明具体实施方式中矩形蜂窝结构在x、y方向上承受荷载时的整体受力图示意图;
[0030]
图4为本发明具体实施方式中代表胞元在x、y方向上承受荷载时的整体受力图示意图;
[0031]
图5为本发明具体实施方式中四分之一简化结构在x、y方向上承受荷载时的示意图;
[0032]
图6为本发明具体实施方式中矩形蜂窝结构在其他方向上承受荷载时的整体受力图示意图;
[0033]
图7为本发明具体实施方式中矩形蜂窝结构壁板长度a对面内等效力学参数的影响示意图;
[0034]
图8为本发明具体实施方式中矩形蜂窝结构壁板长度b对面内等效力学参数的影响示意图;
[0035]
图9为本发明具体实施方式中矩形蜂窝结构壁板长度h对面内等效力学参数的影响示意图;
[0036]
图10为本发明具体实施方式中矩形蜂窝结构壁板长度l对面内等效力学参数的影响示意图;
[0037]
图11为本发明具体实施方式中矩形蜂窝结构初始剪切模量g对面内等效力学参数的影响示意图;
[0038]
图12为本发明具体实施方式中矩形蜂窝结构初始弹性模量e对面内等效力学参数的影响示意图;
[0039]
图13为本发明具体实施方式中矩形蜂窝结构屈服强度σs对矩形蜂窝结构应力应变曲线的影响示意图;
[0040]
图14为本发明具体实施方式中矩形蜂窝结构初始弹性模量e对矩形蜂窝结构应力应变曲线的影响示意图;
[0041]
图15为本发明具体实施方式中提供的电子设备的结构示意图。
具体实施方式
[0042]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
[0043]
需要说明的是,虽然在系统示意图中进行了功能模块划分,在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于系统中的模块划分,或流程图中的顺序执行所示出或描述的步骤。说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
[0044]
下面结合附图,对本技术实施例作进一步阐述。
[0045]
实施例一
[0046]
本实施例提供了一种矩形蜂窝结构面内等效力学性能弹塑性的分析方法。
[0047]
如图1所示,将矩形蜂窝结构视为一种具有周期特性的各向异性材料,建立全局直
角坐标系,水平向右为x轴,竖直向上为y轴,垂直平面向外为z轴。
[0048]
如图2所示,从矩形蜂窝结构中截取一个代表性胞元进行受力分析,b、d点位胞元壁板的中点,设h是胞元壁板bc的长度,l是胞元壁板cd的长度,a是胞元壁板ab的长度,b是胞元壁板de的长度,t是胞元壁板的宽度,b是结构的在z轴方向上的深度,e是结构的材料杨氏模量,a是胞元壁板的横截面积,i是结构的极惯性矩。
[0049]
矩形蜂窝结构在水平和垂直受力如图3所示。如图4所示,从蜂窝结构中截取一个代表性胞元进行力学分析。x方向上的有效横截面积ax、总拉伸应力fx表达式如式(5)所示;y方向上的有效横截面积ay、总拉伸应力fy表达式如式(6)所示:
[0050][0051][0052]
如图5所示,根据对称原理可将代表胞元力学等效为四分之一简化结构受力图。其中,利用b点转角为0及单位荷载法可得b点弯矩mb表达式如式(7)所示:
[0053][0054]
对于四分之一胞元,胞元的每一个壁板被看成是受弯曲、剪切和轴向荷载共同作用的梁,胞元壁板bc、cd的轴力方程、剪力方程和弯矩方程表达式如公式(8)所示:
[0055][0056]
由能量法可得,位移求解通式,如式(9)所示。其中,公式(9)中第一项为结构弯矩引起的位移;第二项为轴力引起的位移;第三项为剪力引起的位移。其中e为壁板杨氏模量,g为壁板剪切模量,i为壁板截面极惯性量,a为壁板截面面积。αs为剪切系数,和结构横截面有关,本结构横截面为矩形,取αs=1.2。
[0057][0058]
由此可得,当结构x方向受力时,即fy=0。四分之一胞元b截面x、y方向位移如公式(10)所示:
[0059][0060]
所以四分之一胞元结构a截面x、y方向位移如公式(11)所示:
[0061][0062]
随着σ
x
不断增大,b点弯矩不断增大,b点最先达到极限弯矩mu,形成塑性铰。mu表达式如式(12)所示。其中,σs为结构屈服强度
[0063][0064]
此时结构承载力还未到达极限,可继续加载。
[0065]
bc壁板和cd壁板内力方程式如式(13)所示。
[0066][0067]
由此可得a截面x方向和y方向位移,如式(14)所示。
[0068][0069]
当σ
x
继续增大,cd杆达到极限,结构承载力达到极限。
[0070]
综上所述,当时,结构处于弹性阶段,a截面在x方向和y方向位移如式(11)所示。
[0071]
当时,结构处于塑性阶段。此时,a截面在x方向和y方向位移如式(14)所示。
[0072]
同理可得,结构y方向受力时,即fx=0。当时,结构处于弹性阶段,a截面在x方向和y方向位移如式(15)所示。
[0073][0074]
当时,bc壁板和cd壁板内力方程式如式(16)所示。由此可得a截面x方向和y方向位移如式(17)所示。
[0075][0076][0077]
当蜂窝结构在其他方向受力时,其分析过程可以简化为x方向受力和y方向受力的叠加。如图6所示。为与x轴成角方向的拉伸应力,从周期矩形蜂窝结构中切出一个代表胞元进行力学分析,代表胞元有效横截面积和总拉伸力如式(18)所示。将总拉伸力分别向x方向和y方向进行投影可得式(19)
[0078][0079][0080]
矩形蜂窝结构在x方向单轴受拉情况下,结构的应变ε
x
′
,εy′
如式(20)所示;x方向等效有效面积a'
x
、等效应变σ'
x
如式(21)所示;等效泊松比ν
xy
和等效杨氏模量e
x
如式(22)所示:
[0081]
[0082][0083][0084]
矩形蜂窝结构在y方向单轴受拉情况下,结构应变ε
x
′
εy′
如式(23)所示;y方向等效有效面积a
′y、等效应变σ
′y如式(24)所示;等效泊松比ν
yx
和等效杨氏模量ey如式(25)所示。
[0085][0086][0087][0088]
代表胞元在x方向上的应变、在y方向上的应变在与x轴成角方向上的应变在与x轴成角方向上的应变如式(26)所示。
[0089][0090]
矩形蜂窝结构在与x轴成角方向上单轴受拉情况下,等效泊松比和等效杨氏模
量表示为式(27)
[0091][0092]
图7为本发明实施例中蜂窝结构参数a对矩形等效参数的影响示意图。其中结构及材料参数为:a=0.5,1,1.5,2,2.5,3,3.5,4,4.5,5mm,b=2mm,h=6mm,l=8mm,b=1mm,t=1mm,e=200gpa,g=80gpa,αs=1.2,σs=245mpa。从结果可以看出:1、在一定范围内,壁板长度a越长,x方向等效杨氏模量ex越大,y方向上的等效杨氏模量ey越小;2、在一定范围内,壁板长度a越长,x方向等效泊松比vxy越大,y方向上的等效泊松比vyx越小。
[0093]
图8为本发明实施例中蜂窝结构参数b对矩形等效参数的影响示意图。其中结构及材料参数为:a=2mm,b=0.5,1,1.5,2,2.5,3,3.5,4,4.5,5mm,h=6mm,l=8mm,b=1mm,t=1mm,e=200gpa,g=80gpa,αs=1.2,σs=245mpa。从结果可以看出:1、在一定范围内,壁板长度b越长,x方向等效杨氏模量ex越小,y方向上的等效杨氏模量ey越大;2、在一定范围内,壁板长度b越长,x方向等效泊松比vxy越小,y方向上的等效泊松比vyx越大。
[0094]
图9为本发明实施例中蜂窝结构参数h对矩形等效参数的影响示意图。其中结构及材料参数为:a=2mm,b=2mm,h=6,7,8,9,10,11,12,13,14,15mm,l=8mm,b=1mm,t=1mm,e=200gpa,g=80gpa,αs=1.2,σs=245mpa。从结果可以看出:1、在一定范围内,壁板长度h越长,x方向等效杨氏模量ex越小,y方向上的等效杨氏模量ey越大;2、在一定范围内,壁板长度h越长,x方向等效泊松比vxy越小,y方向上的等效泊松比vyx越大。
[0095]
图10为本发明实施例中蜂窝结构参数l对矩形等效参数的影响示意图。其中结构及材料参数为:a=2mm,b=2mm,h=6mm,l=5,6,7,8,9,10,11,12,13,14mm,b=1mm,t=1mm,e=200gpa,g=80gpa,αs=1.2,σs=245mpa。从结果可以看出:1、在一定范围内,壁板长度l越长,x方向等效杨氏模量ex越大,y方向上的等效杨氏模量ey越小;2、在一定范围内,壁板长度l越长,x方向等效泊松比vxy越大,y方向上的等效泊松比vyx越小。
[0096]
图11为本发明实施例中蜂窝结构参数g对矩形等效参数的影响示意图。其中结构及材料参数为:a=2mm,b=2mm,h=6mm,l=8mm,b=1mm,t=1mm,e=200gpa,g=40,50,60,70,80,90,100,110,120gpa,αs=1.2,σs=245mpa。从结果可以看出:1、在一定范围内,初始剪切模量g越大,x方向等效杨氏模量ex越大,y方向上的等效杨氏模量ey越大;2、在一定范围内,初始剪切模量g越大,x方向等效泊松比vxy越大,y方向上的等效泊松比vyx越大。
[0097]
图12为本发明实施例中蜂窝结构参数e对矩形等效参数的影响示意图。其中结构及材料参数为:a=2mm,b=2mm,h=6mm,l=8mm,b=1mm,t=1mm,e=60,80,100,120,140,160,180,200,220,240gpa,g=80gpa,αs=1.2,σs=245mpa。从结果可以看出:1、在一定范围内,初始弹性模量e越大,x方向等效杨氏模量ex越大,y方向上的等效杨氏模量ey越大;2、在一定范围内,初始弹性模量e越大,x方向等效泊松比vxy越小,y方向上的等效泊松比vyx越小。
[0098]
图13为本发明实施例中蜂窝结构参数σs对矩形应力应变曲线的影响示意图。其中结构及材料参数为:a=2mm,b=2mm,h=6mm,l=8mm,b=1mm,t=1mm,e=200gpa,g=
80gpa,αs=1.2,σs=100,150,200,250mpa。从结果可以看出:在一定范围内,材料屈服强度σs越大,应力拐点σ*越大,应变拐点ε*越大。
[0099]
图14为本发明实施例中蜂窝结构参数e对矩形应力应变曲线的影响示意图。其中结构及材料参数为:a=2mm,b=2mm,h=6mm,l=8mm,b=1mm,t=1mm,e=100,150,200,250gpa,g=80gpa,αs=1.2,σs=245mpa。从结果可以看出:在一定范围内,初始弹性模量e越大,应变拐点ε*越小,应力拐点σ*几乎不变。
[0100]
实施例二
[0101]
本实施例参考图15,结合图15所示,本实施例提供矩形蜂窝结构面内等效力学性能的弹塑性分析的电子设备,包括处理器(processor)和存储器(memory)。可选地,该电子设备还可以包括通信接口(communicationinterface)和总线。其中,处理器、通信接口、存储器可以通过总线完成相互间的通信。通信接口可以用于信息传输。处理器可以调用存储器中的逻辑指令,以执行上述实施例的矩形蜂窝结构面内等效力学性能的弹塑性分析方法。
[0102]
本实施例还提供了一种存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为执行上述矩形蜂窝结构面内等效力学性能的弹塑性分析方法。
[0103]
上述的存储介质可以是暂态计算机可读存储介质,也可以是非暂态计算机可读存储介质。非暂态存储介质,包括:u盘、移动硬盘、只读存储器(rom,read-onlymemory)、随机存取存储器(ram,randomaccessmemory)、磁碟或者光盘等多种可以存储程序代码的介质,也可以是暂态存储介质。
[0104]
以上描述和附图充分地示出了本公开的实施例,以使本领域的技术人员能够实践它们。其他实施例可以包括结构的、逻辑的、电气的、过程的以及其他的改变。实施例仅代表可能的变化。除非明确要求,否则单独的部件和功能是可选的,并且操作的顺序可以变化。一些实施例的部分和特征可以被包括在或替换其他实施例的部分和特征。而且,本技术中使用的用词仅用于描述实施例并且不用于限制权利要求。如在实施例以及权利要求的描述中使用的,除非上下文清楚地表明,否则单数形式的“一个”(a)、“一个”(an)和“所述”(the)旨在同样包括复数形式。类似地,如在本技术中所使用的术语“和/或”是指包含一个或一个以上相关联的列出的任何以及所有可能的组合。另外,当用于本技术中时,术语“包括”(comprise)及其变型“包括”(comprises)和/或包括(comprising)等指陈述的特征、整体、步骤、操作、元素,和/或组件的存在,但不排除一个或一个以上其它特征、整体、步骤、操作、元素、组件和/或这些的分组的存在或添加。在没有更多限制的情况下,由语句“包括一个
…”
限定的要素,并不排除在包括所述要素的过程、方法或者电子设备中还存在另外的相同要素。本文中,每个实施例重点说明的可以是与其他实施例的不同之处,各个实施例之间相同相似部分可以互相参见。对于实施例公开的方法、产品等而言,如果其与实施例公开的方法部分相对应,那么相关之处可以参见方法部分的描述。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。