矿用车辆的导航定位方法
1.本技术是发明名称为“矿用车辆的导航定位系统及导航定位方法”、申请日为2022年9月1日、申请号为202211060213.4的发明专利申请的分案申请。
技术领域
2.本发明涉及导航定位技术领域,特别涉及一种矿用车辆的导航定位方法。
背景技术:
3.随着矿车的自动驾驶技术的兴起,高精度组合定位模块成为矿车自动驾驶系统中的关键传感器之一。同时自动驾驶车的系统功能安全要求也越来越高,组合定位模块的连续可靠工作是自动驾驶功能安全的重要因素。但是目前的高精导航定位模块产品大多来自测绘行业应用的产品,成本高昂且非车规级设计,鲜有考虑功能安全要求。例如,对天线的故障诊断不到位,这样无法区分是信号被遮挡,还是天线无法工作,对车辆的后续策略造成困扰;又如,对电源的保障不到位,当某部分的供电故障时,会让整个定位系统瘫痪。
4.另外,现有技术对多个传感器之间的时间同步的处理方法单一,只提供pps(pulse per second,秒脉冲)加gprmc的方式。在自动驾驶传感器配置数量越来越多的趋势下,无法提供足够的驱动能力和灵活性。同时,通信接口大多以串口为主,实际由于串口通信的可靠性较难控制,不适用车内总线。
技术实现要素:
5.为了解决现有技术中存在的上述问题和缺陷的至少一个方面,本发明提供了一种矿用车辆的导航定位系统及应用该导航定位系统进行导航定位的方法。
6.根据本发明的一个方面,提供了一种矿用车辆的导航定位方法,包括以下步骤:
7.将第一天线接收模块和第二天线接收模块与第一射频信号处理模块和第二射频信号处理模块分别连接以形成两路并行的射频信号处理电路;
8.将所述第一射频信号处理模块和第二射频信号处理模块分别与第一gnss定位模块和第二gnss定位模块连接,以将经射频信号处理电路得到的两路卫星导航信号分别输入第一gnss定位模块和第二gnss定位模块进行信号处理;
9.将第一gnss定位模块和第二gnss定位模块以及惯性测量模块分别与可编程片上系统连接;
10.通过可编程片上系统根据第一gnss定位模块和第二gnss定位模块的输出结果以及两个天线基线向量计算出两个天线的方位角和俯仰角从而确定出航向并同时根据差分技术抵消公共误差部分;
11.由所述第一gnss定位模块和第二gnss定位模块输出的pps信号进行逻辑与运算确定可编程片上系统输出的pps信号,对齐第一gnss定位模块输出的第一gnss信号和第二gnss定位模块输出的第二gnss信号的时钟信号以弥补第一gnss信号和第二gnss信号的时信号差。
12.在一些实施例中,所述可编程片上系统输出的pps信号并发为多路,用于分别匹配预设的多路时间同步的车载传感器。
13.在一些实施例中,所述导航定位方法还包括设置多路对外通信接口和协议串口。
14.在一些实施例中,所述导航定位方法还包括提供两路用于通知关联车辆电子控制单元定位系统故障的硬线输出接口和一路用于当关联车辆电子控制单元故障时通知导航定位系统的硬线输入接口以及一路用于提示主电源故障的硬线信号输出接口。
15.在一些实施例中,所述可编程片上系统包括微处理器和可编程门阵列,所述微处理器用于处理所述导航定位系统的对外通信和协议传输,可编程门阵列用于处理导航定位数据的计算,
16.所述可编程门阵列分别与第一gnss定位模块和第二gnss定位模块连接以处理矿用车辆的位置数据,所述可编程门阵列与惯性测量模块连接以处理矿用车辆的加速度和角速度数据。
17.在一些实施例中,所述可编程门阵列与所述第一gnss定位模块和第二gnss定位模块通过uart协议通信。
18.在一些实施例中,所述可编程门阵列与所述惯性测量模块通过sp i接口连接。
19.在一些实施例中,所述可编程片上系统的可编程门阵列完成所接收到的gnss定位和定向数据的解算、矫正、融合以及坐标系的变换。
20.在一些实施例中,所述gnss定位和定向数据构成两个gnss坐标向量,将两个分别用于描述gnss信号的两个坐标向量输入可编程门阵列,由可编程门阵列对相应的gnss信号进行计算得出定位和定向数据,同时两路gnss定位和定向数据进行矫正,然后对矫正后的两路gnss定位和定向数据进行融合。
21.在一些实施例中,所述融合采用对两路gnss信号进行差分处理方式并由可编程门阵列执行坐标系变换的任务。
22.本发明所述矿用车辆的导航定位系统,通过组合双gnss模块和imu模块,融合两路gnss和一路imu的数据,使车辆的导航定位更精准。同时利用可编程片上系统并行计算两路gnss定位数据和一路imu数据,提高计算效率,降低车辆定位的处理延迟,从而进一步提升车辆定位的整体可靠性,提升车辆的功能安全等级。
附图说明
23.本发明的这些和/或其他方面和优点从下面结合附图对优选实施例的描述中将变得明显和容易理解,其中:
24.图1是本发明实施例所述的矿用车辆的导航定位系统的框架结构示意图;
25.图2是本发明实施例所述的矿用车辆的导航定位系统的原理结构图;
26.图3为本发明实施例所述的矿用车辆的导航定位方法的流程示意图。
具体实施方式
27.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在说明书中,相同或相似的附图标号指示相同或相似的部件。下述参照附图对本发明实施方式的说明旨在对本发明的总体发明构思进行解释,而不应当理解为对本发明的一种限制。
28.为更清楚的阐述本发明所保护方案的内容,首先对本发明实施例涉及的术语作以下解释说明:
29.gnss(global navigation satellite system)全球导航卫星系统,用于定位物体的位置。
30.imu(inertial measurement unit)惯性测量单元,主要用于测量物体xyz三轴的姿态角或角速率以及加速度。
31.fpga(field programmable gate array)现场可编程逻辑门阵列,是专用于集成电路的一种半定制电路,其包括可编程输入输出单元、可配置逻辑块、数字时钟管理模块、嵌入式块ram、布线资源、内嵌专用硬核、底层内嵌功能单元等基本模块。
32.spi(serial peripheral interface)串行外设接口,是一种同步串行数据传输标准,用于保证主机以及和主机通过spi接口连接的多个从机具有相同的时钟信号。
33.pps(pulse per second)秒脉冲,表示每秒多少个脉冲信号,用于指示整秒的时刻,通常用pps的上升沿标示,为了提高信号收发的时间精度,采用pps来标识整秒时刻。
34.rtk(real-time kinematic)实时动态,rtk技术是一种利用gps载波相位观测进行实时动态相对定位的技术,其实现原理为:基准站接收机架设在已知或未知坐标的参考点上,连续接受所有可视的gnss卫星信号;基准站将测站点坐标、伪距观测值载波相位观测值、卫星跟踪状态和接收机工作状态等通过无线数据链发送给移动站;移动站先进行初始化,完成整周未知数的搜索求解后,进入动态作业。移动站在接收来自基准站的数据时,同步观测采集gnss卫星载波相位数据,通过系统内差分处理求解载波相位整周模糊度,移动站根据移动站和基准站的相关性得出移动站的平面坐标x、y和高程h。
35.uart(universal asynchronous receiver/transmitter)通用异步收发传输器,是一种串行异步收发全双工协议,其工作原理是将数据的二进制位一位一位的进行传输。在uart通讯协议中信号线上的状态位高电平代表
’1’
,低电平代表
’0’
。当然两个设备使用uart串口通讯时,必须先约定好传输速率和一些数据位。通过uart进行通信连接,互相通信的两个硬件各需具备三个数据端口,分别表示为tx:发送数据端,要接对面设备的rx;rx:接收数据端,要接对面设备的tx;gnd:保证两设备共地,有统一的参考平面。
36.mic(microcontroller)微控制器。
37.ddrm(dual data rate sram)双速率同步动态数据存储器。mems传感器(microelectro mechanical systems)微机电系统传感器,用于测量物体的加速度、角速度等惯性导航信息。
38.参考图1所示的矿用车辆的导航定位系统的框架结构示意图。本发明所述矿用车辆的导航定位系统包括第一天线接收模块、第二天线接收模块、第一射频信号处理模块、第二射频信号处理模块、第一定位模块、第二定位模块、可编程片上系统以及惯性测量模块。
39.所述第一天线接收模块和第二天线接收模块分别连接第一射频信号模块和第二射频信号模块,以形成两路并行的射频信号处理电路。
40.所述第一射频信号模块和第二射频信号模块分别与第一定位模块和第二gnss定位模块连接,以将所述经射频信号处理电路得到的两路卫星导航信号分别输入第一定位模块和第二定位模块做信号处理。
41.所述第一定位模块和第二定位模块以及惯性测量模块分别与可编程片上系统连
接。
42.在一个示例中,第一定位模块和第二定位模块均为用于定位矿用车辆的位置信息的全球导航卫星系统(gnss)模块,即第一定位模块为第一gnss定位模块,第二定位模块为第二gnss定位模块。
43.在一个示例中,惯性测量模块为用于测量矿用车辆的角速度/姿态和加速度的惯性测量单元(imu),即惯性测量模块为imu模块。
44.具体的,所述可编程片上系统包括微处理器和可编程门阵列,所述微处理器用于处理所述导航定位系统的对外通信和协议传输,可编程门阵列用于处理导航定位数据的计算。在一个示例中,微处理器为arm处理器,可编程门阵列为现场可编程门阵列(fpga)。所述arm处理器和可编程门阵列分别执行系统的不同数据业务,从而提高所述导航定位系统的定位精度和定位数据计算效率的同时,提升整个系统的对外通信传输速率。
45.优选的,所述可编程片上系统输出的pps信号由所述第一gnss定位模块和第二gnss定位模块输出的pps信号经逻辑与运算确定,对齐所述第一gnss信号和第二gnss信号的时钟信号,弥补两个gnss信号的时信号差,提高所述可编程片上系统输出的时钟精度。
46.可选的,所述可编程片上系统输出的pps信号并发分为多路(例如4路),用于分别匹配预设的多路时间同步的车载传感器,以保证所述多路车载传感器的时间信号同步,降低车载传感器之间的信号延迟,同时增强了传感器数量的可扩展性。
47.可选的,所述导航定位系统还包括多路对外通信接口和协议串口,从而进一步提高系统的数据并发处理能力。
48.imu是由三个轴的加速度计和陀螺仪组成。加速度计检测车辆在坐标系统独立三轴的加速度信号,而陀螺仪检测相对于导航坐标系的角速度信号,通过对这些信号进行处理,得出车辆的姿态信息。但imu提供的定位信息只是相对定位信息,用于测量相对于起点车辆所运动的路线,而不能像gnss信号那样提供车辆的具体地理位置(例如车辆的经度、纬度等坐标位置)。但是当gnss信号较弱时,imu可以基于车辆的前次有效位置插值并校正后获得车辆当前的实时位置,同时也可以和gnss信号结合使用提高车辆的导航定位精度。
49.进一步,所述导航定位系统还包括两路用于通知关联车辆电子控制单元定位系统故障的硬线输出接口,和/或一路用于当关联车辆电子控制单元故障时通知系统的硬线输入接口,由此使系统具有一定的诊断能力。当诊断出自身故障不可恢复时,对外发送故障提示信号,该信号既包含总线信号,也备份有硬线输出提示;当外部存在故障时,也会有总线和硬线的故障提示输入系统,可以允许系统模块做一定程度的应急处理。
50.进一步,所述导航定位系统还包括一路用于提示主电源故障的硬线信号输出接口。当主电源发生故障,总线和逻辑提示信号都失效时,所述导航定位系统仍然可以正常通过独立的硬线信号对外输出故障提示。
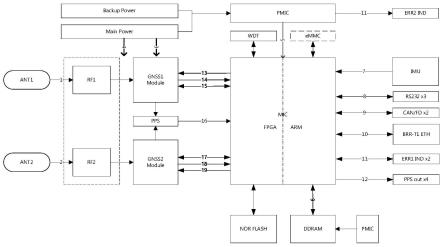
51.图2示出了本发明的实施例所述矿用车辆的导航定位系统的原理结构图。图中第一天线接收模块ant1和第二天线接收模块ant2为两路卫星导航定位信号接收天线;第一射频信号处理模块rf1和第二射频信号处理模块rf2为射频处理模块,其包括天线馈电偏置和保护电路,射频滤波器等部分;如图2中的标号1和2所示,所述第一和第二射频处理模块rf1和rf2分别连接第一天线接收模块ant1和第二天线接收模块ant2,输出给第一和第二gnss定位模块(简称两路gnss定位模组),第一和第二gnss定位模块输出定位结果都给mic的
fpga。本发明实施例通过使用两路独立的gnss定位模块,可以消除共有误差,如星轨误差、卫星几何构型误差、电离层误差、对流层误差、时钟钟差、多径效应、接收机噪声、天线相位中心误差、内部时延误差等,从而提升车辆导航定位系统的定位精度。如图2中4所示,所述rf1和rf2模组均接入主电压源(main power)和备电压源(backup power),如图2中标号3所示,所述gnss1模组接入主备电压源,以保证在其中一个电压源故障时,另外一个电压源仍可以保证供电需求。
52.优选的,本发明所述mic选用xilinx的zynq7000s的z-7012s的soc,符合汽车级aec-q100标准,它包含一个主频达667mhz的arm核,可编程片上系统的逻辑单元具备36kb的双端口ram,具有4通道高速串行收发器。所述可编程片上系统zynq配备的ddram,选用micron的512m的lpddr mt46h16m32lf系列颗粒,nor flash选用cypress的spi接口的芯片s25fs512sagnfa,gnss定位模组选用ublox的模组zed-f9k,专为汽车级adas(高级驾驶辅助系统)应用而设计的模组,支持l1和l2频带的gps glo gal bds,也支持sbas和qzss,内部集成mems传感器;高精度独立imu选用adi的adis 16505-2,用于mic的pmic采用renesas的isl91211aik。
53.可编程片上系统(mic)内部包含ps和pl两大部分。ps为cortex-a9的arm。pl为fpga的可编程逻辑门阵列,fpga根据两个gnss模组的输出结果以及两个天线基线向量,可以计算出两个天线的方位角和俯仰角,从而不需要运动一段距离就能很快确定出航向,同时fpga根据差分技术抵消公共误差部分,提高定位精度。
54.为了更清楚解释本发明所述方案,对所述通过两个gnss模组输出的结果及两个天线基线向量计算两个天线方位角和俯仰角的原理做如下说明:
55.gnss信号包括载波信息、扩频码、导航数据信息(包括系统时间、卫星星历、卫星时钟修正参数、历书、电离层延时模型参数等)等。
56.其中,卫星星历指卫星的位置,即卫星在地心坐标系中的坐标,该坐标系随地球旋转,根据卫星星历可以获得接收天线的经度和维度;
57.历书表示在轨卫星的粗略轨道参数,用于预测卫星的位置。
58.车辆的导航定位是指相对一个坐标系,确定动态车辆在地图中所处的位置和姿态等信息,然后由这些信息绘制导航线路。其中,所述相对坐标系可以是局部的坐标系,如一个确定的矿区地图坐标系,将这个矿区中任意一点作为坐标原点;又可以是全球地图坐标系,以任意一点作为坐标原点,动态确定车辆相对该坐标原点的位置信息。导航定位信息包括车辆的位置、姿态,具体来说,车辆的位置指x、y、z三个方向的坐标点,车辆姿态指俯仰、横滚、航向,分别对应于x、y、z三个方向,是车辆本身的坐标系的三个轴和相对坐标系的三个轴之间的夹角。此外,所述导航定位信息还可以包括x、y、z三个方向的速度、加速度、角速度等。
59.天线的俯仰角是指天线相对于水平面的角度,当天线所处的维度越高,天线俯仰角就越小,所处的维度越低,天线的俯仰角就越大。
60.天线的方位角是指天线相对于正北方向转动的角度,如果天线偏西转动则方位角为正值,如果天线偏东转动则方位角为负值。
61.具体的,通过解析gnss信号,得到载波相位、载波波长、卫星星历等信息,计算得出天线基线的方位角和俯仰角,所述天线基线的方位角和基线俯仰角构成天线基线向量,再
将所述天线基线向量转换为天线所在坐标系中的坐标向量,再通过经坐标变换的天线基线向量计算天线的方位角和俯仰角。由此可以快速得到车辆运动的航向坐标。
62.为进一步提高车辆导航更新速度,本发明采用多个不同协议的对外通信接口,并行处理不同信号的通信传输。一方面,所述矿用车辆导航定位系统的对外通信接口和协议处理等由所述mic上的arm处理器来处理。优选的,所述定位系统的对外通信接口包括3路rs232,2路can/fd,1路100base-t1;协议处理包括串口的输出语句打包拆包,can协议栈,以太网协议栈,gptp协议栈,标定协议,uds协议栈等,本发明对此不做限定。
63.另一方面,所述接收到的gnss定位和定向数据的解算、矫正、融合以及坐标系的变换等高计算量的任务由所述mic上的fpga来完成。如上所述,gnss定位和定向数据构成两个gnss坐标向量,将两个分别用于描述gnss信号的两个坐标向量输入fpga,由fpga对相应的gnss信号进行计算得出定位和定向数据,同时由于卫星信号gnss的定位和定向数据存在误差,需要对相应数据进行矫正,然后对矫正后的两路gnss定位和定向数据进行融合,融合方式可采用对两路gnss信号进行差分处理等方式,由于接收的gnss定位数据是相对于卫星坐标系,需将该数据变换为车辆所在的坐标系的坐标,因此fpga还需要执行坐标系变换的任务。
64.同时,由于定位模组内部的mems传感器的精度有限,因此增加独立高精度imu,从而修正并提升定位精度,且在无gps数据的情况下可提升定位时间,予以车辆足够的紧急反应时间。因此高精度的imu的数据也会输出到fpga端,由fpga进行融合算法处理,从而提升计算速度和精度;由于pps信号要求非常小的时延,对算力要求较高,因此也应交由fpga来处理并输出。具体的,如图2中标号16所示,pps信号处理模块的输出端接入fpga,fpga接收两路gnss模组输出的pps信号,对两者的pps信号进行逻辑与运算,以将该结果作为整个导航定位系统的pps输出信号。同时,fpga对两个gnss定位模组的pps信号采样和补偿,以使系统并行输出4路同相位的pps信号(如图2中标号12所示),方便匹配多路传感器,优选的,每路具备20ma的负载驱动能力,从而解决现有技术中传感器配置灵活性不足的问题。
65.进一步的,norflash是非易失闪存存储器,用于存储片上的操作系统,ddram采用两片的方式,分别用于arm和fpga的独立处理和存储数据;嵌入式多媒体卡(embedded multi media card,emmc)为预留设计,可以为未来功能扩展使用;看门狗(watchdog timer,wdt)为定时器电路,是外部硬件看门狗,用于监控mic的工作,防止死机;mic可以软件复位定位模组。
66.为进一步说明如图2所示的矿用车辆的导航定位系统的具体实现原理,对其内部通信结构和对外通信接口做进一步说明,其中,所述内部通信结构主要包含以下几组:
67.fpga同gnss定位模组间分别使用两路uart通信,如图2中所示的标记13、14和18、19,一路(如图2中所示的标记14)用于gnss模组输出结果,一路(如图2中所示的标记13)用于gnss模组接收rtk数据;imu同mic之间采用spi接口,如图2所示的标记7;同时,nor flash为spi接口,用于读取操作系统文件和配置文件;ddram为并行通信接口,如图2中所示的标记6,用于运行过程中的数据读写存储;pmic与mic也为spi通信,如图2中所示的标记5,用于监控电源状态和控制状态切换。如图2中所示的15和17分别用于两个gnss定位模组与fpga之间传输控制信号,如发送重启信号。
68.其中,所述导航定位系统的对外通信接口主要包括如下:
69.三路rs232接口(车规级转换器),如图2中所示的标记8,其中一路用于接收外部rtk数据,一路用于时间同步的gprmc输出,一路用于串口的定位数据输出;两路can/fd接口,如图2中所示的标记9,一路可用于定位数据的输出,支持can fd,以提升数据带宽,为输出数据的更高频率做基础;所述两路can/fd接口的另外一路可用于接收车内信号参与数据矫正,如接收车速,挡位等信号,以提供更精确的车辆定位信息矫正信息。
70.一路车载以太网接口,如图2中所示的标记10,用于数据输出、时间同步和诊断等功能;三路硬线接口,如图2中所示的标记11,其中两路输出硬线信号,用于通知关联ecu定位系统故障,一路硬线用于当关联ecu故障时向定位系统输入故障提示。对外接口设计采用车载通信接口,canfd,100base-t1,更方便匹配车内网络。进一步的,pmic为mic和ddr提供电源,由于mic为多路电压轨,因此pmic也为匹配的多路输出的电源ic。系统两路供电的电压范围是9-36v,一级dcdc会将输入电压转换为稳定的5v,提供给后级的各路pmic。通过采用一主一备的双路供电,提升整个定位系统的供电可靠性,增加对各个关键模块的诊断和保护能力。当诊断出自身故障不可恢复时,对外发送故障提示信号,该信号既包含总线信号,也备份有硬线输出提示;当外部存在故障时,也会有总线和硬线的故障提示输入,可以允许模块做一定程度的应急处理;当模块主电源发生故障时,总线和逻辑提示信号都会失效,因此,电源部分有独立的故障提示硬线信号输出。
71.本发明实施例采用对关键部件的冗余设计,如gnss定位模组,mems传感器和imu模组,双路ddram,双电源等设计;另外采用车规级器件,整体提升定位模块的整体的可靠性,以使车辆的导航定位系统达成功能安全等级。
72.本发明实施例所述的矿用车辆的导航定位系统,首先采用双gnss定位模组设计,可以快速计算出定位数据,即使其中一个模组故障也不会导致无法输出定位数据,起到了冗余设计目的;
73.其次,采用板上独立的高精度imu模组,比定位模组自身的imu性能有极大地提升,同时也是对imu的一种三冗余设计,提升整个模块的功能安全等级;
74.然后,采用车载的通信接口,尤其是车载以太网接口,可以更精准的匹配车载应用,同时还有支持can fd的can接口和汽车级rs232接口;
75.最后,采用fpga并行计算两路gnss定位数据和imu的数据,比一般的mcu或者arm处理器有更短的处理延时,更快的数据输出。
76.如图3所示,本发明还提供一种应用上述的矿用车辆的导航定位系统进行导航定位的方法,所述方法包括以下步骤:
77.s30、可编辑片上系统的可编程门阵列接收两路gnss定位信号和一路imu惯性导航信号;
78.s31、可编程片上系统的可编程门阵列分别对两路gnss定位信号和一路imu惯性导航信号进行卡尔曼滤波处理;
79.s32、可编程片上系统的可编程门阵列对所述经滤波处理后的两路gnss定位信号进行校正;
80.s33、可编程片上系统的可编程门阵列对经校正后的两路gnss定位信号和经卡尔曼滤波处理的一路imu惯性导航信号进行融合计算,得到车辆的导航定位数据。
81.所述两个gnss定位模块通过两路gnss天线接收两路卫星导航信号,具体的将所述
两路gnss定位信号经过射频信号处理模块处理后,由所述可编程片上系统的可编程门阵列接收,对两路gnss定位信号做卡尔曼滤波处理,同时为了得到更精确的gnss定位信号,所述可编程门阵列根据接收到的车内的档位数据、车速数据以及天线基线数据对所述两路gnss定位信号进行校正,然后通过两路gnss定位信号解算得到高精度绝对定位数据和时间;同时,两个gnss定位模块分别能够产生一秒一次的脉冲信号(即1pps),所述可编程片上系统的可编程门阵列将两个gnss定位模块的pps信号进行逻辑与运算,用于同步多路传感器的时钟同步信号。
82.同步的,所述可编程片上系统与imu模块连接,imu模块向所述可编程片上系统的可编程门阵列发送三轴角速度及三轴加速度数据,所述可编程片上系统的可编程门阵列接收imu惯性导航信号并做卡尔曼滤波处理,然后将gnss定位信号解算得到的高精度绝对定位数据和imu模块发送的三轴角速度及三轴加速度数据进行融合,最终得到车辆的导航定位数据。
83.综上,本发明所述矿用车辆的导航定位系统及导航定位方法,通过组合双gnss模块和imu模块,融合两路gnss和一路imu的数据,使车辆的导航定位更精准。同时利用可编程片上系统并行计算两路gnss定位数据和一路imu数据,提高计算效率,降低车辆定位的处理延迟,从而进一步提升车辆定位的整体可靠性,提升车辆的功能安全等级。
84.虽然本总体发明构思的一些实施例已被显示和说明,本领域普通技术人员将理解,在不背离本总体发明构思的原则和精神的情况下,可对这些实施例做出改变,本发明的范围以权利要求和它们的等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。