1.本实用新型涉及拆包投料设备技术领域,尤其是涉及一种上料装置及拆包投料系统。
背景技术:
2.在食品、制药、保健品、乳粉、石油、化工、冶金和新能源等行业对物料进行加工时,若物料具有外包装,则需要对物料先进行拆包,再把物料投放至所需工序。通常需要人工将带有外包装的物料送至拆包投料装置,待拆包完成后,还需要人工将外包装回收,人工劳动量大,拆包效率低。
技术实现要素:
3.本实用新型的目的在于提供一种上料装置及拆包投料系统,以在一定程度上解决现有技术中存在的拆包过程人工劳动量大,拆包效率低技术问题。
4.本实用新型提供了一种上料装置,包括:机架、上料机构和横向驱动机构;所述上料机构包括上料夹取组件和上料竖向驱动件,所述回收机构包括回收抓取组件和回收竖向驱动件;所述横向驱动机构设置在所述机架上,所述横向驱动机构与所述上料竖向驱动件传动连接;所述上料竖向驱动件与所述上料夹取组件传动连接。
5.可以将物料输送装置、拆包投料装置和外包装收集仓沿机架的长度方向间隔设置,且使得上料夹取组件能够位于物料输送装置的上方,上料夹取组件能够位于拆包投料装置的上方。横向驱动机构带动上料竖向驱动件到达物料输送装置处,从而带动上料夹取组件到达物料输送装置处,上料竖向驱动件带动上料夹取组件运动,从而将物料输送装置上的物料的夹取;然后横向驱动机构带动上料竖向驱动件运动至拆包投料装置处,从而带动上料夹取组件到达拆包投料装置处,上料竖向驱动件带动上料夹取组件向拆包投料装置的拆包仓内运动,从而将物料放入拆包投料装置的拆包仓内进行脱除外包装。本实用新型提供的上料装置可以实现将物料搬运至拆包投料装置内的自动化,从而实现自动上料,避免人工操作,减少人力劳动,提高拆包效率。
6.进一步地,所述上料装置还包括回收机构,所述回收机构包括回收抓取组件和回收竖向驱动件;所述横向驱动机构与所述回收竖向驱动件传动连接,所述回收竖向驱动件与所述回收抓取组件传动连接。
7.进一步地,所述上料装置还包括上盖竖向驱动件,所述横向驱动机构与所述上盖竖向驱动件传动连接,所述上盖竖向驱动件用于与拆包投料装置中拆包仓的上盖连接。
8.进一步地,所述上料装置还包括滑轨、滑块和框架;所述滑轨固定在所述机架上,所述滑轨的长度方向与所述机架的长度方向相同,所述滑块沿所述滑轨的长度方向滑设在所述滑轨上,所述框架与所述滑块固定连接;在所述框架的长度方向上,所述上盖竖向驱动件位于所述上料竖向驱动件和所述回收竖向驱动件之间;所述横向驱动机构与所述滑块传动连接。
9.进一步地,所述滑轨的数量为两个,在所述机架的宽度方向上,两个所述滑轨分别设置在所述机架的两侧,每个所述滑轨上均滑设有所述滑块;所述框架包括横梁和立柱,在所述横梁的宽度方向上,所述横梁的两侧均连接有所述立柱,所述立柱与所述滑块连接。
10.进一步地,所述横向驱动机构包括电机和丝杠;丝杠平行间隔设置在所述滑轨的上方,所述电机与所述丝杠传动连接;所述滑块包括相互连接的螺母部和滑动部,所述螺母部套设在所述丝杠外,所述滑动部滑设在所述滑轨上,所述框架与所述滑动部连接。
11.进一步地,所述上料夹取组件包括基板、夹爪对以及开合驱动件;所述夹爪对包括相对设置在所述基板上的两个夹爪,所述开合驱动件与两个所述夹爪中的至少一个传动连接,以驱动所述夹爪对开合。
12.进一步地,所述上料机构还包括导杆;所述上料竖向驱动件的固定部设置在所述框架上,所述框架上设有导孔,所述导杆的一端与所述基板连接,所述导杆的另一端穿过所述导孔。
13.进一步地,所述回收抓取组件包括底板和至少两个吸盘;两个所述吸盘设置在所述底板上,所述回收竖向驱动件与所述底板传动连接。
14.本实用新型提供一种拆包投料系统,包括物料输送装置、拆包投料装置、外包装收集仓和上述上料装置;在所述机架的长度方向上,所述拆包投料装置位于所述物料输送装置和外包装收集仓之间。
15.进一步地,拆包投料装置包括拆包仓和拆包机架,所述拆包仓包括与所述拆包机架连接的拆包仓体以及设置在所述拆包仓体内的抖料装置、料袋锁定装置和切割装置;所述抖料装置包括抖料驱动组件和支撑件,所述抖料驱动组件与所述支撑件传动连接,以驱动所述支撑件运动;所述料袋锁定装置包括锁紧驱动组件和锁定爪,所述锁紧驱动组件与所述锁定爪传动连接,以驱动所述锁定爪向靠近或者远离所述支撑件的方向运动;所示支撑件上设有刀口,所述刀口用于暴露部分料袋,所述切割装置包括切割驱动件和刀具,所述切割驱动件位于所述支撑件的下方,所述切割驱动件与所述刀具传动连接,以驱动所述刀具沿所述刀口的延伸方向运动。
16.应当理解,前述的一般描述和接下来的具体实施方式两者均是为了举例和说明的目的并且未必限制本公开。并入并构成说明书的一部分的附图示出本公开的主题。同时,说明书和附图用来解释本公开的原理。
附图说明
17.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
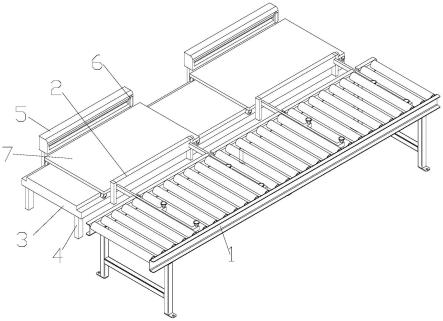
18.图1为本实用新型实施例的拆包投料系统的第一视角的结构示意图;
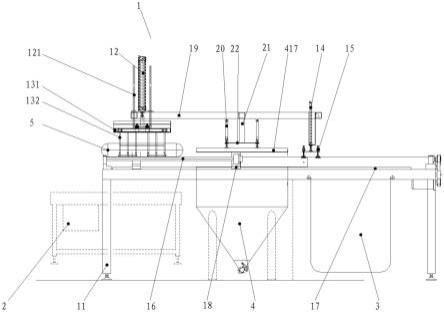
19.图2为图1所示的拆包投料系统本实用新型实施例的爆炸图;
20.图3为图1所示的拆包投料系统中拆包投料装置的俯视图;
21.图4为图3所示的拆包投料装置的a-a处的切面图;
22.图5为图3所示的拆包投料装置的b-b处的切面图。
23.图标:1-上料装置;11-机架;12-上料竖向驱动件;13-上料夹取组件;14-回收竖向驱动件;15-回收抓取组件;16-横向驱动机构;17-滑轨;18-滑块;19-框架;20-上盖竖向驱动件;121-导杆;131-基板;132-夹爪;133-开合驱动件;181-螺母部;182-滑动部;191-横梁;192-立柱;21-支撑杆;22-安装板;2-物料输送装置;
24.3-外包装收集仓;
25.4-拆包投料装置;41-拆包仓;411-拆包仓体;412-抖料装置;413-料袋锁定装置;414-切割装置;415-拆包除尘口;416-吸料吸头;417-上盖;4121-翻板;4122-刀口;4123-抖料旋转驱动件;4124-翻转轴;4125-轴承座;41211-穿孔;4131-安装架;4132-锁紧驱动件;4133-倒钩;4134-第一连杆;4135-第二连杆;4136-第三连杆;4141-基架;4142-无轨气缸;4143-刀具;42-拆包机架;
26.5-物料。
具体实施方式
27.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。
28.通常在此处附图中描述和显示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。
29.基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
31.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
32.此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
33.如图1和图2所示,本实用新型提供一种上料装置1,包括:机架11、上料机构和横向驱动机构16;上料机构包括上料夹取组件13和上料竖向驱动件12;横向驱动机构16设置在机架11上,横向驱动机构16与上料竖向驱动件12传动连接,横向驱动机构16可以带动上料竖向驱动件12沿机架11的长度方向往复运动;上料竖向驱动件12与上料夹取组件13传动连接,以驱动上料抓取组件在机架11的高度方向上往复运动。
34.本实施例中,可以将物料输送装置2、拆包投料装置4和外包装收集仓3沿机架11的
长度方向间隔设置,且使得上料夹取组件13能够位于物料输送装置2的上方,上料夹取组件13能够位于拆包投料装置4的上方。横向驱动机构16带动上料竖向驱动件12到达物料输送装置2处,从而带动上料夹取组件13到达物料输送装置2处,上料竖向驱动件12带动上料夹取组件13运动,从而将物料输送装置2上的物料5夹取;然后横向驱动机构16带动上料竖向驱动件12运动至拆包投料装置4处,从而带动上料夹取组件13到达拆包投料装置4处,上料竖向驱动件12带动上料夹取组件13向拆包投料装置4的拆包仓41内运动,从而将物料5放入拆包投料装置4的拆包仓41内进行脱除外包装。本实施例提供的上料装置1可以实现将物料5搬运至拆包投料装置4内的自动化,从而实现自动上料,避免人工操作,减少人力劳动,提高拆包效率。
35.如图1和图2所示,在上述实施例基础之上,进一步地,上料装置还包括回收机构,回收机构包括回收抓取组件15和回收竖向驱动件14;横向驱动机构16与回收竖向驱动件14传动连接,横向驱动机构16可以带动回收竖向驱动件14沿机架11的长度方向往复运动,回收竖向驱动件14与回收抓取组件15传动连接。
36.本实施例中,待物料5的外包装脱除后,横向驱动机构16工作,从而带动回收竖向驱动件14运动至拆包投料装置4处,进而带动回收抓取组件15到达拆包投料装置4处,然后回收竖向驱动件14工作以带动回收抓取组件15向拆包仓41内运动,回收抓取组件15将外包装抓取,回收竖向驱动件14工作带动回收抓取组件15复位,然后横向驱动机构16工作带动回收竖向驱动件14运动至外包装收集仓3处,从而带动回收抓取组件15到达外包装收集仓3处,回收抓取组件15将外包装释放,从而使得外包装进入外包装收集仓3内。本实施例提供的上料装置1可以实现将拆包后的外包装自动回收至外包装收集仓3内,进一步地避免人工操作,减少人力劳动,提高拆包效率。
37.如图1和图2所示,在上述实施例基础之上,进一步地,上料装置还包括上盖竖向驱动件20,横向驱动机构与上盖竖向驱动件20传动连接,以能够带动上盖竖向驱动件20在竖直方向上往复运动;上盖竖向驱动件20用于与拆包投料装置中拆包仓的上盖连接(可以是固定连接)。
38.本实施中,拆包投料装置中拆包仓包括拆包仓体和上盖417,拆包仓体的上侧设有用于物料投放的开口,上盖417可以将该开口覆盖;在上料机构向拆包仓体内投放物料之前,上盖竖向驱动件带动上盖417远离拆包仓体,以将拆包仓体的开口打开;然后,横向驱动机构将上盖竖向驱动件驱动至远离拆包投料装置处,横向驱动机构将上料竖向驱动件驱动至拆包投料装置处,从而实现上料机构向拆包仓体内投放物料;然后,横向驱动机构将上料竖向驱动件移开,横向驱动机构并将上盖竖向驱动件移动至拆包仓体的上方,然后上盖竖向驱动件带动上盖向靠近拆包仓体的方向运动至上盖将拆包仓体的开口覆盖;在拆包投料装置工作期间,上盖将拆包仓体的开口密封,避免灰尘落至拆包仓体外,有利于保障良好的工作环境;拆包投料装置完成工作后,上盖竖向驱动件带动上盖将拆包仓体的开口打开,横向驱动机构将上盖竖向驱动件由拆包仓体的上方移开,横向驱动机构将回收竖向驱动件移动至拆包仓体的上方,回收机构进行外包装回收工作。
39.其中,上料竖向驱动件12可以为气缸、油缸或者电动伸缩杆等能够实现往复直线运动的机构。回收竖向驱动件14可以为气缸、油缸或者电动伸缩杆等能够实现往复直线运动的机构。上盖竖向驱动件20可以为气缸、油缸或者电动伸缩杆等能够实现往复直线运动
的机构。
40.横向驱动机构16驱动上料竖向驱动件12运动、驱动回收竖向驱动件14以及驱动上盖竖向驱动件20运动的方式有多种,例如:横向驱动机构16包括第一横向驱动机构、第二横向驱动机构和第三横向驱动机构,第一横向驱动机构与上料竖向驱动件12传动连接,以独立驱动上料竖向驱动件12运动,第二横向驱动机构与回收竖向驱动件14传动连接,以独立驱动回收竖向驱动件14运动了,第三横向驱动机构与上盖竖向驱动件传动连接以独立驱动上盖竖向驱动件运动。容易理解的是,可以通过协调第一横向驱动机构、第二横向驱动机构和第三横向驱动机构的工作顺序,避免上料竖向驱动件、回收竖向驱动件和上盖竖向驱动件相互干涉。
41.作为一种可选方案,如图1所示,上料装置1还包括滑轨17、滑块18和框架19;滑轨17固定在机架11上,滑轨17的长度方向与机架11的长度方向相同,滑块18沿滑轨17的长度方向滑设在滑轨17上,框架19与滑块18固定连接;在框架的长度方向上,上盖竖向驱动件位于上料竖向驱动件和回收竖向驱动件之间;横向驱动机构16与滑块18传动连接。
42.本实施例中,横向驱动机构16与滑块18传动连接,滑块18与框架19连接,上料竖向驱动件12、回收竖向驱动件14和上盖竖向驱动件20均连接在框架上,可以实现同一个横向驱动机构16同时驱动上料竖向驱动件12、回收竖向驱动件14运动和上盖竖向驱动件20,避免上料竖向驱动件12、上盖竖向驱动件20和回收竖向驱动件14相互干涉,另外,横向驱动机构16的结构简单,结构紧凑。
43.作为一种可选方案,如图2所示,滑轨17的数量为两个,在机架11的宽度方向上,两个滑轨17分别设置在机架11的两侧(具体地,在机架11的宽度方向上,一个滑轨17设置在机架11的一侧,另一个滑轨17设置在机架11的另一侧),每个滑轨17上均滑设有滑块18;框架19包括横梁191和立柱192,在横梁191的宽度方向上,横梁191的两侧均连接有立柱192(立柱192与横梁191形成“门”字结构),立柱192与滑块18连接。
44.本实施例中,滑轨17成对设置,每个滑轨17上均滑设有滑块18,横梁的一侧的立柱与一个滑轨上的滑块连接(该滑轨上的滑块可以为一个、两个或者三个等),横梁的另一侧的立柱与另一个滑轨上的滑块连接(该滑轨上的滑块可以为一个、两个或者三个等),这种结构可以使得横向驱动机构16驱动框架19运动,从而带动上料竖向驱动件12、回收竖向驱动件14和上盖竖向驱动件20的运动过程更加稳定。
45.具体地,可以设置支撑杆21和安装板22实现上盖竖向驱动件20与框架19的连接。支撑杆21的一端与框架的横梁连接,另一端与安装板22连接,上盖竖向驱动件20的固定部固定在安装板上,上盖竖向驱动件的活动部与拆包仓的上盖连接;其中,上盖竖向驱动件的数量可以为一个,也可以为多个(例如:两个、三个或者四个等)。
46.其中,横向驱动机构16可以为气缸或者油缸等可以实现直线往复运动的机构。
47.作为一种可选方案,如图1和图2所示,横向驱动机构16包括电机和丝杠;丝杠平行间隔设置在滑轨17的上方,电机与丝杠传动连接;滑块18包括相互连接的螺母部181和滑动部182,螺母部181套设在丝杠外,滑动部182滑设在滑轨上,框架与所述滑动部连接这种结构的横向驱动机构16可以使得上料机构和回收机构的运动稳定。
48.其中,螺母部和滑动部可以相互独立设置,通过焊接或者螺纹连接等方式连接固定。可选地,螺母部和滑动部一体成型。
49.如图2所示,在上述实施例基础之上,进一步地,上料夹取组件13包括基板131、夹爪对以及开合驱动件133;夹爪对包括相对设置在基板131上的两个夹爪132,开合驱动件133与两个夹爪132中的至少一个传动连接,以驱动夹爪对开合。
50.本实施例中,两个夹爪132相互靠近以能够将物料5夹紧的状态为闭合状态,两个夹爪132相互远离以能够将物料5释放的状态为打开状态。
51.其中,开合驱动件133可以为旋转电机或者旋转气缸,开合驱动件133的动力输出轴上设有主动轮,一个夹爪132与主动轮连接,另一个夹爪132与从动轮连接,从动轮与主动轮啮合,通过开合驱动件133带动主动轮运动,从而带动从动轮转动,进而带动两个夹爪132向靠近对方或者远离对方的方向运动,进而实现夹爪对的开合。
52.或者,开合驱动件133为直线驱动机构(例如:直线气缸、油缸或者电动伸缩杆等),开合驱动件133可以与一个夹爪132传动连接,以驱动该夹爪132能够向靠近或者远离另一个夹爪132的方向直线运动;或者,可以设置两个开合驱动件133,两个开合驱动件133分别与两个夹爪132一一对应传动连接,以带动相应的夹爪132向靠近或者远离另一个夹爪132的方向直线运动;或者,开合驱动件133通过连杆结构与两个夹爪132同时传动连接,连杆机构包括第一传动连杆和第二传动连杆,第一传动连杆的中部与第二传动连杆的中部铰接,第一传动连杆的一端与一个夹爪132连接,第二传动连杆的一端与另一个夹爪132连接,开合驱动件133与第一传动连杆的另一端或者与第二传动连杆的另一端传动连接,从而形成剪刀结构等。
53.其中,可以沿基板131的长度方向(也即,机架11的长度方向)在基板131上间隔设置多个夹爪对(也即,在基板131的宽度方向上,在基板131的一侧设有多个夹爪132,相应的,在基板131的另一侧设有多个夹爪132),从而能够对物料5进行夹取更完全、更稳定。
54.如图1所示,在上述实施例基础之上,进一步地,上料机构还包括导杆121;上料竖向驱动件12的固定部设置在框架19上,框架19上设有导孔,导杆121的一端与基板131连接,导杆121的另一端穿过导孔。
55.本实施例中,当上料竖向驱动件12带动上料夹取组件13运动时,导杆121在导孔内滑动,从而可以使得上料夹取组件13的运动更加平稳。
56.具体地,回收抓取组件15包括底板和至少两个吸盘;两个吸盘设置在底板上,回收竖向驱动件14与底板传动连接。
57.其中,回收竖向驱动件14可以为气缸、油缸或者电动伸缩杆等能够实现往复直线运动的机构。
58.如图1至图5所示,本实用新型的实施例还提供了一种拆包投料系统,包括物料输送装置2、拆包投料装置4、外包装收集仓3、和上述任一技术方案的上料装置1;在机架11的长度方向上,拆包投料装置4位于物料输送装置2和外包装收集仓3之间。本实施例提供的拆包投料系统具有该上料装置1的全部有益技术效果,在此,不再赘述。
59.其中,拆包投料装置4可以采用常规结构。
60.作为一种可选方案,如图3至图5所示,拆包投料装置4包括拆包仓41和拆包机架42,拆包仓41包括与拆包机架42连接的拆包仓体411以及设置在拆包仓体411内的抖料装置412、料袋锁定装置和切割装置414;抖料装置412包括抖料驱动组件和支撑件,抖料驱动组件与仓体的内壁连接,抖料驱动组件与支撑件传动连接,以驱动支撑件运动;料袋锁定装置
包括锁紧驱动组件和锁定爪,锁紧驱动组件与仓体的内壁连接,锁紧驱动组件与锁定爪传动连接,以驱动锁定爪向靠近或者远离翻板4121的方向运动;所示支撑件上设有刀口4122,刀口4122用于暴露部分料袋,切割装置414包括切割驱动件和刀具4143,切割驱动件与仓体的内壁连接,切割驱动件位于支撑件的下方,切割驱动件与刀具4143传动连接,以驱动刀具4143沿刀口4122的延伸方向运动。
61.本实施例中,将待拆包物料5放置在拆包仓体411内的支撑件上,锁紧驱动组件工作,带动锁定爪向靠近支撑件的方向运动,从而将物料5锁定,同时,物料5的外部的料袋的下侧部分暴露在刀口4122处;切割驱动件工作,带动刀具4143沿刀口4122的延伸方向运动,从而将暴露在刀口4122处的料袋切割开口,物料5由料袋的开口处落至拆包仓体411内;抖料驱动组件工作,从而带动支撑件运动,支撑件抖动,从而加速料袋内的物料5流出;流至拆包仓体411的物料5可以由拆包仓体411的出料口排出;料袋内的物料5流完后,锁紧驱动组件驱动锁定爪复位,将料袋松开,对料袋进行收集即可。本实施例提供的拆包仓41能够实现自动拆包,避免人工拆包,减少劳动量,提高物料5拆包效率;另外,对于一些对人体有害的物料5,采用本实施例提供的拆包仓41拆包还可以避免有害物质对人的健康造成损害。
62.作为一种可选方案,如图3至图5所示,支撑件包括在拆包仓体411的第一方向上相对且间隔设置的翻板4121,间隔形成刀口4122;一个翻板4121的远离另一个翻板4121的一侧与抖料驱动组件传动连接,抖料驱动组件驱动翻板4121转动,可以理解为,支撑件包括第一翻板4121和第二翻板4121,在拆包仓体411的第一方向(例如:长度方向)上,第一翻板4121设置在拆包仓体411的一侧,第二翻板4121设置在拆包仓体411的另一侧,第一翻板4121和第二翻板4121之间设有间隔,该间隔形成刀口4122,第一翻板4121的远离第二翻板4121的一侧连接有第一抖料驱动组件,第二翻板4121的远离第一翻板4121的一侧连接有第二抖料驱动组件。
63.本实施例中,将物料5的一部分放置在第一翻板4121上,将物料5的另一部分放置在第二翻板4121上,当刀具4143将料袋的下侧切割开口后,第一抖料驱动组件带动第一翻板4121转动,第二抖料驱动组件带动第二翻板4121转动,从而可以使得第一翻板4121和第二翻板4121形成“v”形,然后第一抖料驱动组件带动第一翻板4121复位,第二抖料驱动组件带动第二翻板4121复位,如此反复,使得物料5发生抖动,从而加速物料由料袋的开口处流出,这种结构的抖料装置412结构简单,工作平稳,能够使物料5更快速下落,并且残留少。
64.具体地,如图5所示,抖料驱动组件包括抖料旋转驱动件4123(例如:旋转气缸或者电机等)和与抖料旋转驱动件4123传动连接的翻转轴4124;抖料旋转驱动件4123与拆包仓体411固定连接,翻转轴4124的两端分别与拆包仓体411转动连接,翻板4121的一侧与翻转轴4124连接(可以在拆包仓体411上设置轴承座4125,轴承座4125上安装有轴承,翻转轴4124通过轴承与拆包仓体411转动连接)。
65.在上述实施例基础之上,进一步地,料袋锁定装置413的结构形式可以为多种,例如:料袋锁定装置413设置在支撑件的上方,锁紧驱动组件包括锁紧电机和连接杆,锁定爪为压板,连接杆的一端与锁紧电机的动力输出轴连接,连接杆的另一端与压板固定连接,当物料5到达支撑件上的指定位置时,锁紧电机工作带动连接杆转动,从而带动压板向靠近支撑件的方向运动,直至压板将料袋的边缘压紧在支撑件上,可以设置多个料袋锁定装置413,从而将料袋的多个位置压紧。
66.作为一种可选方案,如图5所示,料袋锁定装置413位于翻板4121的下方;料袋锁紧驱动组件包括安装架4131、锁紧驱动件4132和传动结构,锁定爪为转动设置在安装架4131上的倒钩4133;安装架4131与拆包仓体411固定连接,锁紧驱动件4132与安装架4131连接,锁紧驱动件4132与传动结构连接传动结构与倒钩4133连接以带动倒钩4133转动,翻板4121上设有用于倒钩4133穿过的穿孔41211。
67.本实施例中,当物料5到达翻板4121上后,锁紧驱动件4132工作,带动传动结构运动,传动结构带动倒钩4133转动,倒钩4133由翻板4121上的穿孔41211穿过,穿透料袋,从而将料袋钩住固定。这种结构的料袋锁定装置413,只需料袋覆盖穿孔41211即可,无需将物料5放置在特定的位置上,方便物料5放置;另外,通过倒钩4133由翻板4121的下穿过穿孔41211从而将料袋穿透勾住,则无论料袋的内物料5的量如何变化,倒钩4133均能够固定料袋,使得料袋的牢固,更有利于物料5抖动落料。
68.其中,锁紧驱动件的可以为锁紧旋转驱动件(例如:旋转电机或者旋转气缸等),相应的,传动结构可以为传动轴,锁紧旋转驱动件带动传动轴转动,传动轴带动倒钩转动;或者,锁紧驱动件可以为锁紧直线驱动件(例如:电动伸缩杆、直线电机或者直线气缸等),传动结构包括相互啮合的齿条和齿轮,锁紧直线驱动件带动齿条直线运动,齿条带动齿轮转动,齿轮通过轴与倒钩连接以带动倒钩转动等。
69.作为一种可选方案,锁紧驱动件4132为锁紧直线驱动件,传动结构为连杆结构;锁紧直线驱动件的固定部与安装架4131连接,锁紧直线驱动件的伸缩部与连杆结构转动连接,连杆结构与安装架4131转动连接,倒钩4133与连杆结构连接。
70.本实施例中,通过锁紧直线驱动件和连接结构的配合实现倒钩的转动,锁紧驱动组件的结构简单、紧凑,减少锁紧驱动组件的占用空间。
71.具体地,如图5所示,连杆机构包括第一连杆4134、第二连杆4135和第三连杆4136;第一连杆4134的一端与安装架4131转动连接,第一连杆4134的另一端与第二连杆4135的一端转动连接,第二连杆4135的另一端与第三连杆4136的一端转动连接,第三连杆4136的另一端与安装架4131连接。
72.可以在第一连杆4134的远离第二连杆4135的一端连接倒钩4133,或者在第三连杆4136的远离第二连杆4135的一端连接倒钩4133,也即一个连杆结构带动一个倒钩转动。
73.作为一种可选方案,第一连杆4134的远离第二连杆4135的一端连接有倒钩4133,第三连杆4136的远离第二连杆4135的一端连接有倒钩4133;锁紧驱动件4132与第一连杆4134转动连接。
74.本实施例中,第一连杆4134和第二连杆4135上均设有倒钩4133,则可以多点位对料袋进行固定,当然还可以设置第四连杆、第五连杆等,实现更多倒钩4133的设置。相应的,翻板4121上设有多个穿孔41211,与多个倒钩4133一一对应设置。
75.容易理解的是,倒钩通过连杆结构与安装架间接的转动连接。
76.当然还可以通过改变连杆结构的形式,来实现更多数量的倒钩设置,这是可以通过常规技术手段实现的。
77.需要说明的是,第二连杆4135可以沿第一方向延伸,可以设置多个料袋锁定装置413,多个料袋锁定装置413沿拆包仓体411的第二方向(例如:宽度方向)间隔设置,从而实现对料袋的多个位置进行固定。
78.在上述实施例基础之上,切割驱动件可以采用电动伸缩杆、直线电机或者气缸等。
79.如图5所示,在上述实施例基础之上,进一步地,切割装置414还可以包括基架4141,切割驱动件包括无轨气缸4142,基架4141固定在拆包仓体411内,无轨气缸4142的固定部与基架4141连接,无轨气缸4142的活动部与道具连接。
80.如图3所示,在上述实施例基础之上,进一步地,在拆包仓体411上设置拆包除尘口415,拆包除尘口415可以与外部除尘管道连通,从而以对拆包仓41内进行除尘。
81.如图5所示,在拆包仓体411的底部还设有吸料吸头416,吸料吸头416与后序部件连通,以将拆包仓体411内的物料输送至下一工序。
82.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。在此处所提供的说明书中,说明了大量具体细节。然而,能够理解,本实用新型的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本实用新型的范围之内并且形成不同的实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。