测距装置
1.相关申请的交叉引用
2.本技术基于2020年6月12日申请的日本技术编号2020-102143号、以及2021年4月19日申请的日本技术编号2021-070064号,并在此引用其记载内容。
技术领域
3.本公开涉及测距装置。
背景技术:
4.已知有通过从发光部射出激光等脉冲光,利用受光部检测来自对象物的反射光,并测量从照射到受光为止的光的飞行时间(tof:time of flight),来进行对象物的存在与否的检测或者测定到对象物的距离的测距装置。在这样的测距装置中,用于射出脉冲光的窗或者壳体内部所引起的脉冲光的反射光、在从测距装置到对象物的空间存在的雨或者雾等所引起的脉冲光的反射光被称为所谓的杂波,在到对象物的距离的测定中可能成为障碍。具体而言,有被对象物反射的反射光与杂波合成并被检测为一个受光脉冲,由此不能够正确地测量飞行时间,而测定的距离的精度有可能降低。因此,在下述专利文献1的测距装置中,通过作为对受光强度的阈值,将比杂波的振幅值(强度)大的值设定为阈值(high阈值),并对合成受光脉冲的受光强度应用high阈值,来从合成受光脉冲分离被对象物反射的反射波(期望波),由此,提高到对象物的距离的测定精度。
5.专利文献1:日本特开2015-194356号公报
6.例如,在杂波的原因为雾的情况下,雾越浓则杂波的振幅值越大,杂波与期望波的振幅的差越小。另外,例如在杂波的原因是用于射出脉冲光的窗或者壳体的情况下,所述的窗、壳体表面的反射率越大则杂波的振幅越大,杂波与期望波的振幅的差越小。这样在杂波与期望波的振幅的差变小的情况下,合成波的受光强度的时间变化成为宛如一个山那样的形状。这样的现象并不限定于产生杂波的情况,例如在以测距装置为基准在相互相同的方位存在距离不同的多个对象物的情况下,也可能引起来自这多个对象物的反射光混合。这样,在多个反射光的受光强度合成而成为一个山那样的形状的情况下,在专利文献1的测距装置中,不能够从受光波分离期望波,不能够提高测距精度。在专利文献1中,例如在浓雾或者猛烈降雨那样的恶劣环境下,通过不进行测距,抑制测距精度的降低。但是,期望即使在如恶劣环境下那样多个反射光的受光强度的时间变化合成而成为一个山那样的形状的状况下,也能够精度良好地进行测距的技术。
技术实现要素:
7.作为本公开的一方式,提供测距装置。该测距装置具备:发光部,射出脉冲光;受光部,接受包含上述脉冲光的反射光的光;以及运算部,利用被上述受光部接受的光的飞行时间来运算到对象物的距离亦即对象物距离,其中,上述对象物反射上述脉冲光并输出上述反射光。上述运算部具备:直方图生成部,生成表示多个上述飞行时间中的每个飞行时间的
上述受光部的受光强度的直方图;复合峰部估计部,估计在上述直方图中是否存在复合峰部,上述复合峰部是以峰值飞行时间为边界,上述受光强度相对于上述飞行时间的变化从增加变为减少的峰部,且是将来自距上述测距装置的距离的彼此的差在规定范围内的多个物体的光的强度的分布合成而得到的峰部;飞行时间确定部,在上述峰部中确定作为更短的飞行时间的上升时间和作为更长的飞行时间的下降时间,上述上升时间和上述下降时间是与比包含背景光的噪声光的受光强度大的第一阈值受光强度一致的两个飞行时间;基础飞行时间决定部,在估计为存在上述复合峰部的情况下,基于针对上述复合峰部确定出的上述上升时间和上述下降时间中的任意一个时间,来决定成为用于计算上述对象物距离的基础的基础飞行时间;以及距离计算部,利用上述基础飞行时间来计算上述多个物体中的一个物体的距离作为上述对象物距离。
8.根据该方式的测距装置,基于针对复合峰部确定出的上升时间和下降时间中的任意一个时间,来决定成为用于计算对象物距离的基础的基础飞行时间,并利用决定出的基础飞行时间来运算对象物距离,所以即使在将多个反射光的受光强度的时间变化合成成为一个山那样的形状的状况下,也能够精度良好地测定对象物距离。
附图说明
9.关于本公开的上述目的以及其它目的、特征及优点,参照附图并通过下述的详细描述会变得更加明确。在该附图中:
10.图1是作为本公开的一实施方式的测距装置的概略结构图,
11.图2是示意地表示受光阵列的构成的说明图,
12.图3是示意地表示spad电路的构成的电路图,
13.图4是表示第一实施方式的测距装置的功能构成的框图,
14.图5是表示具有复合峰部的直方图的一个例子的说明图,
15.图6是表示第一实施方式中的测距处理的顺序的流程图,
16.图7是表示不具有复合峰部的直方图的一个例子的说明图,
17.图8是表示第二实施方式的测距装置的功能构成的框图,
18.图9是表示第二实施方式中的测距处理的顺序的流程图,
19.图10是示意地表示第二实施方式中的多个对象物与测距装置的位置关系的俯视图,
20.图11是表示第二实施方式中的具有复合峰部的直方图的一个例子的说明图,
21.图12是表示第二实施方式中的具有复合峰部的直方图的一个例子的说明图,
22.图13是表示第二实施方式中的具有复合峰部的直方图的一个例子的说明图,
23.图14是表示第三实施方式中的具有复合峰部的直方图的一个例子的说明图,
24.图15是表示第四实施方式中的杂波位置设定处理的顺序的流程图,
25.图16是表示第四实施方式中的距离的直方图的一个例子的说明图,
26.图17是表示第五实施方式中的杂波位置设定处理的顺序的流程图,
27.图18是表示第五实施方式中的直方图的例子的说明图,
28.图19是表示第六实施方式中的测距处理的顺序的流程图,
29.图20是表示第六实施方式中的直方图的一个例子的说明图,
30.图21是表示第七实施方式中的测距处理的顺序的流程图。
具体实施方式
31.a.第一实施方式:
32.a1.装置构成:
33.图1所示的测距装置10具备:射出用于测距的脉冲光并接受来自外部物体的反射光的光学系统30、以及对从光学系统30得到的信号进行处理的运算部20。将外部物体也称为“反射物”。光学系统30具备:射出作为脉冲光的激光的发光部40、使激光在预先决定的视野范围80内扫描的扫描部50、以及用于接受包含来自外部物体的反射光、干扰光的入射光的受光部60。测距装置10收容于在前面具有窗92的壳体90。窗92使从发光部40射出的脉冲光的大部分透过,并反射一部分。
34.测距装置10例如是搭载于汽车等车辆的车载用的lidar(laser imaging detection and ranging:激光雷达)。当车辆在水平的路面上行驶的情况下,视野范围80的横向与水平方向x一致,纵向与垂直方向y一致。
35.发光部40具备:射出包含脉冲光的激光的半导体激光元件(以下,也仅称为激光元件)41、编入激光元件41的驱动电路的电路基板43、以及使从激光元件41射出的激光成为平行光的准直透镜45。激光元件41是能够振荡所谓的短脉冲激光的激光二极管。在本实施方式中,激光元件41通过使多个激光二极管沿着垂直方向排列来构成矩形形状的激光发光区域。构成为能够根据供给至激光元件41的电压来调整激光元件41输出的激光的强度。
36.扫描部50由所谓的一维扫描仪构成。扫描部50由反射镜54、旋转螺线管58以及旋转部56构成。反射镜54反射通过准直透镜45成为平行光的激光。旋转螺线管58接受来自运算部20的控制信号,在预先决定的角度范围内反复正转以及反转。旋转部56由旋转螺线管58驱动,以将垂直方向作为轴向的旋转轴反复正转以及反转,使反射镜54在沿着水平方向的一个方向扫描。经由准直透镜45从激光元件41射出的激光被反射镜54反射,通过反射镜54的旋转沿着水平方向扫描。图1所示的视野范围80相当于该激光的整个扫描范围。由于在视野范围80内的各像素位置得到受光强度,所以视野范围80内的受光强度的分布构成一种图像。此外,也可以省略扫描部50,而从发光部40遍及整个视野范围80内的射出脉冲光,并且在受光部60接受遍及视野范围80内的反射光。在本实施方式中,对扫描范围内的各位置,换言之视野范围80内的各像素位置照射脉冲光。而且,针对各像素位置按规定的时间间隔执行所述的脉冲光的照射和基于来自各像素位置的反射光的后述的测距处理。
37.若有人或者车等外部物体(反射物),则从发光部40输出的激光被外部物体的表面漫反射,其一部分作为反射光返回到扫描部50的反射镜54。该反射光被反射镜54反射,与干扰光一起作为入射光入射到受光部60的受光透镜61,被受光透镜61聚光并入射到受光阵列65。此外,从测距装置10输出的激光并不限定于外部物体,也在测距装置10内部的物体例如窗92中漫反射,其反射光的一部分入射到受光阵列65。
38.如图2所示,受光阵列65由二维排列的多个像素66构成。一个像素66由排列为在水平方向为h个、在垂直方向为v个的多个spad(single photon avalanche diode:单光子雪崩二极管)电路68构成。h以及v分别为1以上的整数。在本实施方式中,h=v=5,由在水平方向以及垂直方向分别为五个的spad电路68构成。但是,能够以任意的数目的spad电路68构
成像素66,也可以由一个spad电路68构成像素66。一个像素66的受光结果成为视野范围80内的一个像素位置中的受光强度。
39.如图3所示,spad电路68在电源vcc与接地线之间串联连接雪崩二极管da和猝灭电阻器rq,将其连接点的电压输入到作为逻辑运算元件之一的反转元件inv,转换为电压电平反转的数字信号。反转元件inv的输出信号sout保持原样地输出到外部。在本实施方式中,猝灭电阻器rq构成为fet,如果选择信号sc为激活,则其通态电阻作为猝灭电阻器rq动作。如果选择信号sc为非激活,则猝灭电阻器rq成为高阻抗状态,所以即使光入射到雪崩二极管da,也不流动猝灭电流,结果spad电路68不进行动作。选择信号sc一并输出到像素66内的5
×
5个spad电路68,用于指定读出还是不读出来自各像素66的信号。在本实施方式中,使雪崩二极管da以盖革模式进行动作,但也可以在线性模式下使用雪崩二极管da,并将其输出保持为模拟信号进行处理。另外,也可以使用pin光电二极管来代替雪崩二极管da。
40.如果没有光入射到spad电路68,则雪崩二极管da保持为非导通状态。因此,反转元件inv的输入侧保持为经由猝灭电阻器rq被上拉的状态,也就是保持为高电平h。因此,反转元件inv的输出保持为低电平l。若光从外部向入射到spad电路68,则雪崩二极管da通过入射的光(光子)而成为通电状态。其结果,经由猝灭电阻器rq流过较大的电流,反转元件inv的输入侧暂时成为低电平l,反转元件inv的输出反转为高电平h。经由猝灭电阻器rq流过较大的电流的结果是,施加给雪崩二极管da的电压降低,所以向雪崩二极管da的电力供给停止,雪崩二极管da返回到非导通状态。其结果,反转元件inv的输出信号也反转并返回到低电平l。结果,若光(光子)入射到各spad电路68,则反转元件inv在极短时间内输出成为高电平的脉冲信号。因此,如果与各spad电路68接受光的定时配合地使选择信号sc为高电平h,则反转元件inv的输出信号,也就是来自各spad电路68的输出信号sout成为反映了雪崩二极管da的状态的数字信号。而且,该输出信号sout相当于通过包含照射光被存在于扫描范围的外部物体或者窗92等反射而返回来的反射光、干扰光的入射光的受光而产生的脉冲信号。
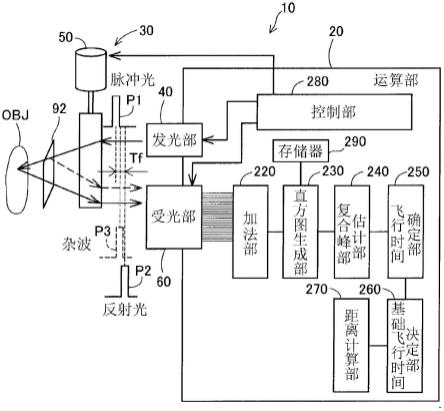
41.运算部20利用被受光部60接受的反射光的飞行时间,来运算到反射脉冲光并输出反射光的对象物的距离(以下,称为“对象物距离”)。所述的距离的运算方法的概要如以下那样。如图4所示,从发光部40射出的脉冲光p1在作为外部物体的反射物obj被反射。换句话说,反射物obj输出脉冲光p1的反射光p2。另外,脉冲光p1也在窗92的内侧表面被反射,输出反射光p3。其结果,反射光p2、p3到达受光部60。此时,将从脉冲光p1的射出到反射光p2、p3的受光为止的时间确定为光的飞行时间tf。运算部200利用该飞行时间tf来运算从测距装置10(发光部40以及受光部60)到反射物ojb的距离。此外,在窗92的内侧表面反射脉冲光p1得到的反射光、该反射光在测距装置10的壳体内部反射几次并被受光部60接受的光也被称为“杂波”。
42.如图4所示,运算部20具备:加法部220、直方图生成部230、复合峰部估计部240、飞行时间确定部250、基础飞行时间决定部260、距离计算部270、控制部280以及存储器290。
43.加法部220将构成受光阵列65的像素66所包含的各spad电路68的输出相加。若入射的光脉冲入射到一个像素66,则像素66所包含的spad电路68进行动作。spad电路68仅通过一个光子入射也能够检测该光子。但是,在spad电路68中,从反射物obj输出的有限的光的检测不得不成为概率性的检测。因此,加法部220构成为通过将来自仅能够概率性地检测
入射的光的spad电路68的输出信号sout加上各像素66所包含的所有spad电路68的量,从而更可靠地检测各像素66中的来自反射物obj的反射光。
44.直方图生成部230通过按照时间序列获取加法部220的加法结果,来生成受光强度的直方图,并存储于存储器290。直方图生成部230生成的直方图可以说是表示多个飞行时间的每个飞行时间下的受光强度的图。受光强度是一个像素66内进行了受光的spad电路68的合计数。
45.复合峰部估计部240估计在由直方图生成部230生成的直方图中是否存在复合峰部。复合峰部意味着在直方图中,以峰值飞行时间为边界,受光强度相对于飞行时间的变化从增加变为减少的峰部,且将来自距测距装置10的距离的彼此的差在规定范围内的多个物体的光的强度的分布合成而得到的峰部。
46.在图5中,横轴表示飞行时间tf,纵轴表示受光强度i。在图5中以粗实线表示的直方图hr1是将细的点划线表示的基于杂波的受光强度的直方图hr11和细的实线的由测距装置10的外部的对象物反射的反射光的受光强度的直方图hr12合成而得到的直方图。图5所示的各直方图表示测距装置10的外部的对象物位于测距装置10(窗92)的附近的情况下的直方图。在图5的例子中,在直方图hr1中出现复合峰部mp0。此处,直方图hr11与直方图hr12在时间上相互重复。而且,直方图hr11的峰值的受光强度(度数)与直方图hr12的峰值的受光强度(度数)几乎彼此相等。因此,如图5所示,复合峰部mp0作为一个山那样的形状出现。在峰部中的上升时间到下降时间之间的时间,换言之,在直方图中受光强度成为后述的第一阈值以上的时间连续规定时间以上的情况下,复合峰部估计部240估计为在直方图中存在复合峰部。此外,对于图5所示的受光强度i的各值即、噪声强度i1、第一阈值受光强度i3以及峰值强度i4的详细,后述。另外,对于图5所示的飞行时间tf的各值即、上升时间tu1、下降时间td1、峰值时间tp1以及中间时间tc1的详细,后述。
47.飞行时间确定部250在由直方图生成部230生成的直方图中确定受光强度与第一阈值受光强度一致的两个飞行时间(后述的上升时间以及下降时间)。第一阈值受光强度是指在计算对象距离时使用的受光强度的阈值,用于决定直方图的峰部中的上升时间和下降时间。在图5的例子中,设定有第一阈值受光强度i3。在本实施方式中,第一阈值受光强度被设定为下述式(1)所示的值。
48.第一阈值受光强度=(峰值强度-噪声强度)
×
0.4 噪声强度
…
(1)
49.此处,峰值强度意味着峰部中的最大受光强度,在图5的复合峰部mp0中,峰值强度i4符合。另外,噪声强度意味着脉冲光的反射光以外的光(以下,称为“噪声光”)的受光强度。作为这样的噪声光,太阳光、太阳光被外部的对象物反射得到的反射光、路灯的光等符合。噪声强度能够求出为在发光部40未射出脉冲光的定时测定的受光强度的规定时间内的平均值。式(1)中的(峰值强度-噪声强度)也被称为反射光强度。因此,式(1)意味着将对噪声强度加上反射光强度的百分之四十的值得到的受光强度设定为第一阈值受光强度。此外,也可以代替百分之四十,而使用比百分之四十小或者比百分之四十大的任意的比例。在图5的例子中,飞行时间确定部250将直方图hr1与第一阈值受光强度i3一致的两个时间tu1、td1中在时间上靠前的时间tu1确定为上升时间tu1,另外,将在时间上靠后的时间td1确定为下降时间td1。
50.基础飞行时间决定部260决定成为用于计算对象距离的基础的飞行时间(以下,称
为“基础飞行时间”)。在本实施方式中,如后述那样,基础飞行时间决定部260将下降时间决定为基础飞行时间。后述将下降时间决定为基础飞行时间的理由。
51.距离计算部270利用由基础飞行时间决定部260决定的基础飞行时间来计算对象物距离。对于所述的对象物距离的计算方法的详细,后述。例如,在搭载有测距装置10的车辆中,能够在是否产生与对象物的碰撞的估计处理、用于碰撞避免的转向操纵、制动的控制中使用计算出的对象物距离。
52.a2.测距处理:
53.对各像素位置按规定的时间间隔定期地执行图6所示的测距处理。在发光部40射出脉冲光,在受光部60中接受其反射光,并由直方图生成部230生成直方图之后的定时,开始测距处理。
54.复合峰部估计部240在生成的直方图中确定复合峰部,飞行时间确定部250确定上升时间以及下降时间(步骤s105)。具体而言,复合峰部估计部240通过在直方图中确定超过第一阈值受光强度的飞行时间连续规定时间以上的部位来确定复合峰部。另外,飞行时间确定部250将复合峰部中与第一阈值一致的两个飞行时间确定为上升时间以及下降时间。
55.例如,在图5的例子中,确定出复合峰部mp0,将复合峰部mp0与第一阈值受光强度i3一致的两个时间tu1、td1中在时间上更早的时间tu1确定为上升时间tu1,并将在时间上更晚的时间td1确定为下降时间td1。
56.如图6所示,基础飞行时间决定部260判定反射光的受光位置是否与杂波的位置一致(步骤s110)。杂波即、由窗92、壳体内壁面反射脉冲光的反射光始终从相同的位置(方位)入射受光部60。另外,到窗92、壳体内壁面的距离始终是恒定的。因此,能够预先通过实验或者模拟确定在哪个方位的像素位置,以何种程度的飞行时间确定由窗92、壳体内壁面反射脉冲光的反射光。因此,在本实施方式中,预先在存储器290中存储由窗92、壳体内壁面反射脉冲光的反射光的像素位置以及飞行时间,通过判定检测到复合峰部时的像素位置以及复合峰部的飞行时间是否与存储于存储器290的像素位置以及飞行时间一致,来判定反射光的受光位置是否与杂波的位置一致。
57.在判定为反射光的受光位置与杂波的位置不一致的情况下(步骤s110:否),距离计算部270通过通常的方法计算距离,并确定为对象物距离(步骤s115)。使用图7对这样的步骤s115中的测距方法进行说明。
58.图7中的纵轴以及横轴与图5相同,所以省略其详细的说明。例如在与产生杂波的方位不同的方位在测距装置10的外部存在对象物,且在受光部60从所述的对象物接受到脉冲光的反射光的情况下,可能产生图7所示的峰部mp1。该情况下,由于峰部mp1的像素位置(方位)与杂波的位置不同(不包含),所以通过飞行时间确定部250将上升时间tu2与下降时间td2的中间时间确定为峰部mp1的峰值时间tp2。而且,基础飞行时间决定部260将该峰值时间tp2决定为基础飞行时间,距离计算部270利用峰值时间tp2求出从测距装置10到这些多个物体的距离。
59.如图6所示,在判定为反射光的受光位置与杂波的位置一致的情况下(步骤s110:是),基础飞行时间决定部260将在步骤s105确定出的下降时间决定为基础飞行时间(步骤s120)。距离计算部270基于在步骤s120决定的基础飞行时间来计算距离(步骤s125)。具体而言,例如若将图5所示的复合峰部mp0的下降时间td1决定为基础飞行时间,则距离计算部
270将从下降时间td1追溯了预先决定的时间δt后的时间tp1确定为峰值时间tp1。然后,距离计算部270利用该峰值时间tp1来计算对象距离。更具体而言,假设峰值时间tp1是脉冲光及其反射光的飞行时间tf,计算对象距离。
60.如图5所示,从时间td1追溯了时间δt后的时间(峰值时间tp1)与直方图hr12的峰值时间几乎一致。另一方面,上升时间tu1与下降时间td1的中间时间tc1从直方图hr1的峰值时间较大地偏离。因此,可知通过如上述那样将峰值时间tp1作为基础飞行时间来计算距离,与利用通常的方法计算距离相比,能够更正确地计算到与直方图hr1对应的对象物的距离。对如上述那样中间时间tc1较大地偏离直方图hr1的峰值时间的理由进行说明。复合峰部mp0是将基于从位于更远处的反射物obj输出的反射光的直方图hr12和基于从位于更近处的窗92输出的杂波的直方图h12合成而产生的复合峰部,所以其上升位置tu1与峰值位置在时间上更靠前的直方图hr11的上升位置几乎一致。另外,直方图hr11的下降位置与基于来自存在于更远处(飞行时间更长)的对象物的反射光的直方图h12的下降位置几乎一致。另一方面,在时间上靠前的直方图hr11的下降位置由于在时间上更靠后的直方图hr12的存在,而从直方图hr1的下降位置较大地偏离。同样地,在时间上靠后的直方图hr12的上升位置由于在时间上靠前的直方图hr11的存在,而较大地偏离直方图hr1的上升位置。因此,即使为了按照通常的方法计算对象距离,而确定上升时间tu1与下降时间td1的中间时间亦即中间时间tc1,所述的中间时间tc1也成为从直方图hr11的峰值时间和直方图hr12的峰值时间的任何一个均较大地不同地偏移的时间。与此相对,通过将与对象物的下降时间几乎一致的直方图hr1的下降时间作为基准,将从所述的下降时间追溯了时间δt后的时间作为基础飞行时间,能够求出与在将对象物的峰值时间作为基础飞行时间的情况下计算出的距离几乎相同的距离。
61.如图6所示,距离计算部270判定通过步骤s125计算出的距离是否小于预先决定的阈值距离(步骤s130)。若步骤s130中的阈值距离大于所述的距离,则作为被认为不是杂波的距离,设定为对从发光部40以及受光部60到窗92为止的距离加上规定值后的值。由于基于基础飞行时间计算出的距离比在杂波的情况下计算出的距离大,为了确认接受的反射光确实不是基于杂波的反射光而执行该步骤s130。
62.在判定为通过步骤s125计算出的距离不小于比阈值距离的情况下(步骤s130:否),执行上述的步骤s115,通过通常的方法计算对象物距离。与此相对,在判定为通过步骤s120计算出的距离小于阈值距离的情况下(步骤s130:是),距离计算部270将通过步骤s125计算出的距离确定为对象物距离(步骤s135)。在上述的步骤s115或者步骤s135完成后,结束该像素位置的测距处理,并开始对下一个像素位置的测距处理。
63.根据以上说明的第一实施方式的测距装置10,在估计为存在包含窗92、壳体内壁面等壳体内部的脉冲光的反射光亦即杂波的复合峰部的情况下,基于下降时间决定基础飞行时间,所以在产生杂波的情况下能够精度良好地测定对象物距离。一般而言,窗92、壳体内部的脉冲光的反射光与存在于测距装置的外部的对象物相比飞行时间较短。换句话说,由存在于外部的对象物反射脉冲光的反射光的飞行时间比壳体内部的脉冲光的反射光长。因此,复合峰部的下降位置(时间)与由存在于外部的对象物反射脉冲光的反射光的下降位置(时间)的误差较小。因此,根据本实施方式的测距装置10,能够提高估计为存在复合峰部的情况下的测距精度。
64.另外,在不存在杂波的情况下,将上升时间与下降时间之间的中间时间决定为基础飞行时间,所以与在这样的情况下也基于上升时间与下降时间中的任意一个来决定基础飞行时间的结构相比,能够精度更好地测定对象物距离。作为其一个原因,能够列举即使在分别确定上升时间和下降时间时产生误差,通过设为其中间时间,与仅将上升时间或者下降时间的任意一方作为基准来决定基础飞行时间的结构相比,也能够抑制误差的影响。
65.b.第二实施方式:
66.图8所示的第二实施方式的测距装置10a的构成在运算部20追加具备中间时间确定部235这一点与第一实施方式的测距装置10的构成不同。测距装置10a的其它构成与第一实施方式的测距装置10相同,所以对相同的构成附加相同的附图标记,并省略其详细的说明。
67.中间时间确定部235在复合峰部中确定与第一阈值受光强度一致的两个飞行时间的中间时间(以下,称为“第一中间时间”)、和与第二阈值受光强度一致的两个飞行时间的中间时间(以下,称为“第二中间时间”)。第一阈值受光强度与第一实施方式的第一阈值受光强度相同。第二阈值受光强度是比第一阈值受光强度小的受光强度,且是比噪声强度大的强度。具体而言,在本实施方式中,第二阈值受光强度被设定为下述式(2)所示的值。
68.第二阈值受光强度=(峰值强度-噪声强度)
×
0.1 噪声强度
…
(2)
69.图9所示的第二实施方式的测距处理在省略步骤s110这一点和追加执行步骤s106、s107、s108、s123这一点与图6所示的第一实施方式的测距处理不同。第二实施方式的测距处理中的其它顺序与第一实施方式的测距处理相同,所以对相同的顺序附加相同的附图标记,并省略其详细的说明。
70.在步骤s105完成后,中间时间确定部235计算第一中间时间和第二中间时间(步骤s106)。
71.如图10所示,在某个像素位置81存在两个对象物obj1、obj2,并且各对象物obj1、obj2具有从测距装置10a观察露出的区域ar1、ar2的情况下,分别从这两个区域ar1、ar2输出的反射光入射到测距装置10a的受光部60。在图10的例子中,在从测距装置10a观察时,对象物obj1位于近前侧,在从测距装置10a观察时,对象物obj2位于里侧。另外,在像素位置81,从测距装置10a观察到的区域ar1的露出面积大于区域ar2的露出面积。使用图11对在这样的状况下生成的直方图进行说明。
72.图11中的纵轴以及横轴与图5相同,所以省略其详细的说明。在图10的状况下生成的直方图hr3具有将较大的峰部和在时间上在其之后有峰值的较小的峰部合成而产生的复合峰部mp3。具体而言,复合峰部mp3相当于将较细的点划线示出的基于来自区域ar1的反射光的直方图hr31和较细的实线示出的基于来自区域ar2的反射光的直方图hr32合成而得到的直方图hr3中的峰部。如上述那样,区域ar1位于更近前且露出面积更大。与此相对,区域ar2位于更里侧且露出面积较小。因此,直方图hr31的峰部与直方图hr32的峰部相比在时间上靠前,并且,峰值受光强度较大。因此,复合峰部mp3具有在时间上靠前的位置具有比较大的峰值,在时间上靠后的位置具有比较小的峰值的变形的山型的形状。
73.对于这样的形状的复合峰部mp3,在上述的步骤s106中,中间时间确定部235在复合峰部mp3中确定与第一阈值受光强度i11一致的两个时间(上升时间tu3以及下降时间td3),并确定这两个时间的中间时间tc31。另外,中间时间确定部235在复合峰部mp3中确定
与第二阈值受光强度i12一致的两个时间(上升时间tu4以及下降时间td4),并确定这三个时间的中间时间tc32。此外,在本实施方式中,将与第一阈值受光强度一致的两个时间的中间时间称为第一中间时间,并将与第二阈值受光强度一致的两个时间的中间时间称为第二中间时间。因此,中间时间tc31也被称为第一中间时间tc31,另外,中间时间tc32也被称为第二中间时间tc32。
74.如图9所示,复合峰部估计部240判定与第二阈值受光强度一致的两个时间之间的宽度(以下,称为“根部宽度”)是否大于阈值宽度(步骤s107)。在图11的例子中,在复合峰部mp3中,与第二阈值受光强度i12一致的两个时间tu4、td4之间的宽度相当于根部宽度dt31。在如复合峰部mp3那样将来自多个对象物的反射光的直方图所包含的峰部合成而得到的复合峰部中,根本宽度较大。与此相对,基于来自单一的对象物的反射光的峰部的根本宽度较小。因此,预先通过实验等确定并设定用于确定为复合峰部的阈值宽度。如图9所示,在判定为根部宽度不大于阈值宽度的情况下(步骤s107:否),执行上述的步骤s115。该情况下,由于入射来自单一的对象物的反射光,所以通过通常的方法计算距离并确定为对象物距离。
75.在判定为根部宽度大于阈值宽度的情况下(步骤s107:是),该情况下,峰部为复合峰部的可能性较高。而且,在该情况下,基础飞行时间决定部260判定第一中间时间是否在第二中间时间以下(步骤s108)。
76.在图11的例子中,第一中间时间tc31比第二中间时间tc32小(早)。另外,在图13的例子中,第一中间时间与第二中间时间一致。图13所示的直方图hr5是将直方图hr51和直方图hr52合成而得到的直方图。直方图hr51基于来自图10所示的对象物obj1的反射光,直方图hr52基于来自图10所示的对象物obj2的反射光。但是,在图13的例子中,与图10的例子不同,在像素位置81中,从测距装置10a观察到的区域ar1的露出面积与区域ar2的露出面积相等。在这样的状况下,基于来自对象物obj1的反射光的直方图hr51的峰值受光强度与基于来自对象物obj2的反射光的直方图hr52的峰值受光强度相等。因此,复合峰部mp5具有峰值为一个的较大的山型的形状。而且,在该例子中,第一中间时间和第二中间时间均为中间时间tc51。
77.在图11以及图13的例子中,在步骤s108中,判定为第一中间时间tc31比第二中间时间tc32小(早)。这样,在判定为第一中间时间tc31比第二中间时间tc32小(早)的情况下(步骤s108:是),基础飞行时间决定部260将在步骤s105确定出的上升时间决定为基础飞行时间(步骤s123)。例如,在图11的例子中,将上升时间tu3决定为基础飞行时间。另外,在图13的例子中,将上升时间tu7决定为基础飞行时间。
78.与图11以及图13的例子不同,使用图12对第一中间时间比第二中间时间大(迟)的情况进行说明。图12所示的直方图hr4是将直方图hr41、和直方图hr42合成而得到的直方图。直方图hr41基于来自图10所示的对象物obj1的反射光,直方图hr42基于来自图10所示的对象物obj2的反射光。但是,在图12的例子中,与图10的例子不同,在像素位置81中,从测距装置10a观察到的区域ar1的露出面积小于区域ar2的露出面积。在这样的状况下,基于来自对象物obj1的反射光的直方图hr41的峰值受光强度比基于来自对象物obj2的反射光的直方图hr42的峰值受光强度小。因此,复合峰部mp4具有在时间上靠前的位置具有比较小的峰值,在时间上靠后的位置具有比较大的峰值的变形的山型的形状。
79.在这样的图12的例子中,在复合峰部mp4中确定与第一阈值受光强度i21一致的两
个时间(上升时间tu5以及下降时间td5),另外,确定这两个时间的中间时间亦即第二中间时间tc41。并且,在复合峰部mp4中确定与第二阈值受光强度i22一致的两个时间(上升时间tu6以及下降时间td6),另外,确定这两个时间的中间时间亦即第二中间时间tc42。而且,在该例子中,第一中间时间tc41比第二中间时间tc42大(迟)。
80.如图9所示,在判定为第一中间时间不在第二中间时间以下的情况下(步骤s108:否),执行上述的步骤s120,将在步骤s105中确定出的下降时间决定为基础飞行时间。在图12的例子中,将下降时间td5决定为基础飞行时间。
81.如图9所示,在步骤s120或者步骤s123完成后,执行上述的步骤s125、以及s135。
82.如图11所示,当第一中间时间在第二中间时间以下(早或者相同)的情况下,如图10所示,在从测距装置10a观察时,更靠近前侧的对象物obj1的露出面积较大。而且,该情况下,由于将对象物obj1的表面中的脉冲光的反射光的飞行时间作为基础时间来计算对象物距离,所以基于对于搭载有测距装置10a的车辆来说影响更大的对象物来计算对象物距离。另外,如图12所示,在第一中间时间比第二中间时间大(迟)的情况下,与图10的例子不同,在从测距装置10a观察时,更靠里侧的对象物obj2的露出面积较大。而且,该情况下,由于将对象物obj2的表面中的脉冲光的反射光的飞行时间作为基础飞行时间来计算对象物距离,所以在该情况下,也基于对于搭载有测距装置10a的车辆来说影响更大的对象物来计算对象物距离。
83.以上说明的第二实施方式的测距装置10a具有与第一实施方式的测距装置10相同的效果。除此之外,在第一中间时间小于第二中间时间的情况下,基于上升时间来决定基础飞行时间,所以在以测距装置10a为基准在相互相同的方位存在距离不同的多个对象物的情况下,且在前方侧的对象物的该方位上的脉冲光的照射面积较大的情况下,能够求出到前方侧的对象物的距离作为对象物距离。另外,在第一中间时间大于第二中间时间的情况下,基于下降时间决定基础飞行时间,所以在以测距装置10a为基准在相互相同的方位存在距离不同的多个对象物的情况下,且在后方侧的对象物的该方位上的脉冲光的照射面积较大的情况下,能够求出到后方侧的对象物的距离作为对象物距离。这样,根据第二实施方式的测距装置10a,在以测距装置10a为基准在相互相同的方位存在距离不同的多个对象物的情况下,能够求出到前方或者后方的任意一个对象物的距离,即到实际存在对象物的位置的距离,作为对象物距离。除此之外,由于求出到脉冲光的照射面积更大的对象物的距离作为对象物距离,所以能够求出到从测距装置10a观察露出面积更大的对象物的距离作为对象物距离。因此,例如在利用对象物距离发挥车辆的安全功能的结构中,能够发挥所述的功能以更确保安全。另外,在第一中间时间与第二中间时间相同的情况下,基于上升时间决定基础飞行时间,所以在以测距装置10a为基准在相互相同的方位存在距离不同的多个对象物,并且脉冲光的照射面积相互相等的情况下,能够求出到前后的任意一个对象物的距离作为对象物距离。因此,能够抑制求出到不存在对象物的位置的距离作为对象物距离。
84.此外,根据第二实施方式以及上述的第一实施方式也可以理解,基础飞行时间决定部260能够在存在复合峰部的情况下,根据针对复合峰部基于第一阈值受光强度确定出的上升时间和下降时间中的任意一个来决定基础飞行时间。
85.c.第三实施方式:
86.第三实施方式的测距装置10a的构成与图8所示的第二实施方式的测距装置10a相
同,所以对相同的构成要素附加相同的附图标记,并省略其详细的说明。在第二实施方式的测距装置10a中,为了确定上升时间tu3以及时间td3、和中间时间(第一中间时间)tc31而使用的阈值受光强度共用第一阈值受光强度i11。与此相对,在第三实施方式中,为了确定上升时间tu3以及时间td3而使用的阈值受光强度与为了确定中间时间(第一中间时间)而使用的阈值受光强度相互不同。以下,使用图14进行具体的说明。
87.如图14所示,在第三实施方式中,与第二实施方式同样地使用第一阈值受光强度i11来确定上升时间tu3以及下降时间td3。与此相对,在第三实施方式中,与上述的第一阈值受光强度i11分开设定用于确定中间时间tc33的阈值受光强度i14。而且,在复合峰部mp3中确定与所述的阈值受光强度i14一致的两个时间,并确定这两个时间的中间时间作为中间时间tc33。代替第二实施方式的中间时间tc31而使用该中间时间tc33作为第一中间时间。因此,例如在图9所示的测距处理的步骤s108中,判定作为第一中间时间的中间时间tc33是否在作为第二中间时间的第二中间时间tc32以下。在第三实施方式中,阈值受光强度i14预先设定为大于第一阈值受光强度i11且在复合峰部mp3的峰值受光强度亦即强度i13以下的值。此外,也可以将阈值受光强度i14设定为小于第一阈值受光强度i11小且大于第二阈值受光强度i12的值。
88.以上说明的第三实施方式的测距装置10a具有与第二实施方式的测距装置10a相同的效果。此外,第三实施方式中的阈值受光强度i14相当于本公开中的第三阈值受光强度。
89.d.第四实施方式:
90.d1.装置构成:
91.第四实施方式的测距装置10的构成与第一实施方式的测距装置10相同,所以对相同的构成附加相同的附图标记,并省略其详细的说明。如在第一实施方式中叙述的那样,对于起因于窗92、壳体内壁面反射脉冲光的反射光而产生的杂波,在哪个方位的像素位置,以何种程度的飞行时间确定能够预先通过实验或者模拟确定。另一方面,在窗92的外侧表面附着了砂石、泥土等异物的情况下,有时所述的位置的脉冲光的反射光非常大,作为杂波而新产生。在所述的情况下,根据异物的附着位置而产生杂波的像素位置不同,所以不能够预先确定。在第四实施方式的测距装置10中,通过执行后述的杂波位置设定处理,确定并设定如上述那样起因于异物附着等而产生的杂波的位置(哪个方位的像素位置)。
92.d2.杂波位置设定处理:
93.若测距装置10的电源接通则执行图15所示的杂波位置设定处理。直方图生成部230判定是否通过图6所示的测距处理完成了对象物距离的确定(步骤s205)。在完成了对象物距离的确定的时刻,确定有关各像素的从测距装置10到对象物的距离。
94.直方图生成部230包含通过本次的测距处理确定出的距离,生成有关各像素的距离的直方图(步骤s210)。在本实施方式中,在存储器290中,针对各像素存储规定次数量的确定出的对象物距离。上述规定次数基于存储器290的大小,但例如也可以最大存储100次。而且,也可以在存储有100次的对象物距离的状态下新确定出对象物距离的情况下,在最早存储的对象物距离覆盖存储新确定出的对象物距离。在步骤s210中生成的有关各像素的距离的直方图相当于本公开中的“针对各像素计算出的对象物距离的统计值”。
95.在图16中,作为在步骤s210中生成的直方图的例子,示出两个直方图hd1、hd2。粗
实线表示的直方图hd1是有关与预先掌握为产生杂波的位置不同的像素的直方图,示出在窗92附着了泥土等异物的情况下的直方图。较细的虚线的直方图hd2是有关与预先掌握为产生杂波的位置不同的像素的直方图,示出在窗92未附着泥土等异物的情况下的直方图。
96.在窗92附着了异物的情况下,在相当于所述的窗92的位置的距离产生频率的峰值。另一方面,对于其它距离,由于附着异物,所以即使反射光从该方位朝向也被异物遮挡而无法确定基于所述的反射光的距离,所述的距离的频率一直较低。因此,如直方图hd1所示,在比较小的距离d1产生峰值。
97.与此相对,在窗92未附着异物的情况下,若车辆移动,则可能在相当于该像素的方位在各种距离存在对象物。因此,如直方图hd2所示,在较宽的范围的距离下频率大于0,例如成为平缓的山丘状的直方图。
98.如图15所示,直方图生成部230判定是否有在阈值距离以内的范围超过阈值频率的频率的像素(步骤s215)。在得到图16的直方图hd1的情况下,记录在阈值距离thd以内的范围超过阈值频率thn的频率,所以与直方图hd1对应的像素于相当在阈值距离以内的范围超过阈值频率的频率的像素。另一方面,在得到图16的直方图hd2的情况下,由于未记录在阈值距离thd以内的范围超过阈值频率thn的频率,所以与直方图hd2对应的像素不相当于在阈值距离以内的范围超过阈值频率的频率的像素。
99.如图15所示,在判定为有在阈值距离以内的范围超过阈值频率的频率的像素的情况下(步骤s215:是),直方图生成部230将该像素即、在阈值距离以内的范围超过阈值频率的频率的像素的位置追加设定为杂波位置(步骤s220)。如上述那样,使杂波位置存储于存储器290,所以直方图生成部230读出所述的杂波位置的信息,追加在步骤s215确定出的像素位置并存储于存储器290。在步骤s220完成后,处理返回到步骤s205。
100.在上述步骤s215中,判定为没有在阈值距离以内的范围超过阈值频率的频率的像素的情况下(步骤s215:否),直方图生成部230追加设定为所有像素的位置不是杂波位置(步骤s225)。在步骤s225完成后,处理返回到步骤s205。在本实施方式中,也可以构成为,具备进行擦拭窗92的动作的刮水器,在步骤s215中,在判定为有在阈值距离以内的范围超过阈值频率的频率的像素的情况下,通过所述的刮水器擦拭窗92。在起因于附着于窗92的泥土等异物而存在在阈值距离以内的范围超过阈值频率的频率的像素的情况下,在通过刮水器的擦拭动作除去异物之后,在步骤s215中,判定为没有在阈值距离以内的范围超过阈值频率的频率的像素,通过执行步骤s225,更新设定为来源于异物的杂波位置不是杂波位置。
101.此外,也可以代替直方图生成部230,而由距离计算部270或者其它功能部执行上述的步骤s205~s220。另外,也可以由与图4所示的功能部不同的新的功能部执行上述的步骤s205~s220。这样,执行上述的步骤s205~s220的功能部相当于本公开的“杂波位置设定部”。
102.以上说明的第四实施方式的测距装置10具有与第一实施方式的测距装置10相同的效果。除此之外,第四实施方式的测距装置10生成各像素的距离的直方图,在判定为有在阈值距离thd以内的范围超过阈值频率thn的频率的像素的情况下,将所述的像素的位置设定为杂波位置,所以能够确定起因于泥土等异物附着于窗92而产生的杂波的位置。因此,在图6所示的测距处理的步骤s110中,能够精度良好地执行反射光的位置与杂波位置是否一致的判定。
103.e.第五实施方式:
104.第五实施方式的测距装置10的构成与第四实施方式的测距装置10相同,所以对相同的构成附加相同的附图标记,并省略其详细的说明。第五实施方式的测距装置10在杂波位置设定处理的顺序中,与第四实施方式的测距装置10不同。
105.图17所示的第五实施方式的杂波位置设定处理在代替步骤s205而执行步骤s205a这一点、代替步骤s210而执行步骤s210a这一点以及代替步骤s215而执行步骤s215a这一点与图15所示的第四实施方式的杂波位置设定处理不同。第五实施方式的杂波位置设定处理中的其它顺序与第四实施方式的杂波位置设定处理相同,所以对相同的顺序附加相同的附图标记,并省略其详细的说明。
106.如图17所示,直方图生成部230判定直方图是否生成完毕(步骤s205a)。在判定为直方图未生成完毕的情况下(步骤s205a:否),处理返回到步骤s205a。即,直方图生成部230待机直至直方图生成完毕为止。
107.在判定为直方图生成完毕的情况下(步骤s205a:是),直方图生成部230包含本次计算出的直方图,生成有关各像素的飞行时间和平均强度的直方图(步骤s210a)。在本实施方式中,由直方图生成部230生成的有关各像素的直方图存储于存储器290。而且,在步骤s210a中,直方图生成部230对存储于存储器290的多个直方图,求出各飞行时间tg的强度的平均值,由此生成平均强度的直方图。针对各像素生成的平均强度的直方图相当于本公开中的“各像素的受光强度的统计值”。
108.在图18中,作为在步骤s210a中生成的直方图的例子,示出两个直方图hr61、hr62。粗实线表示的直方图hr61是有关与预先掌握为产生杂波的位置不同的像素的直方图,示出在窗92附着了泥土等异物的情况下的直方图。较细的虚线的直方图hr62是有关与预先掌握为产生杂波的位置不同的像素的直方图,是在窗92未附着泥土等异物的情况下的直方图。
109.在窗92附着了异物的情况下,在相当于所述的窗92的位置的飞行时间tf(更正确而言,是到所述的位置为止的往复的飞行时间)产生受光强度i的峰值。另一方面,对于其它飞行时间tf,由于附着异物,所以即使假设反射光从该方位朝向也被异物遮挡,所以无法确定基于所述的反射光的飞行时间tf,而所述的飞行时间tf中的受光强度i保持较低。因此,如直方图hr61所示,在比较短的时间t6产生峰值。
110.与此相对,在窗92未附着异物的情况下,若车辆移动,则可能在相当于该像素的方位在各种距离存在对象物。因此,如直方图hr62所示,在较宽的范围的飞行时间tf中受光强度i大于0,例如成为平缓的山丘状的直方图。
111.如图17所示,直方图生成部230判定是否有在阈值飞行时间以内的范围具有平均强度超过阈值强度的峰值的像素(步骤s215a)。在得到图18的直方图hr61的情况下,记录在阈值飞行时间tht以内的范围超过阈值强度it1的飞行时间t6,所以与直方图hr61对应的像素相当于在阈值飞行时间tht以内的范围超过阈值强度it1的频率的像素。另一方面,在得到图18的直方图hr62的情况下,未记录在阈值飞行时间tht以内的范围超过阈值强度it1的频率,所以与直方图hr62对应的像素不相当于在阈值飞行时间tht以内的范围超过阈值强度it1的强度的像素。
112.若判定为有在阈值飞行时间tht以内的范围具有平均强度超过阈值强度it1的峰值的像素(步骤s215a:是),则直方图生成部230将该像素即、在阈值飞行时间tht以内的范
围具有平均强度超过阈值强度it1的峰值的像素的位置追加设定为杂波位置(步骤s220)。
113.另一方面,在上述步骤s215a中,判定为没有在阈值飞行时间tht以内的范围具有平均强度超过阈值强度it1的峰值的像素的情况下(步骤s215a:否),处理返回到步骤s205a。因此,该情况下,不更新存储器290中所存储的杂波位置。
114.以上说明的第五实施方式的测距装置10具有与第四实施方式的测距装置10相同的效果。除此之外,第五实施方式的测距装置10生成各像素的飞行时间和平均强度的直方图,在判定为有在阈值飞行时间tht以内的范围超过阈值强度it1的强度的像素的情况下,将所述的像素的位置设定为杂波位置,所以能够确定起因于泥土等异物附着于窗92而产生的杂波的位置。因此,在图6所示的测距处理的步骤s110中,能够精度良好地执行反射光的位置与杂波位置是否一致的判定。
115.f.第六实施方式:
116.第六实施方式的测距装置10的构成除了测距处理的详细顺序之外,与第一实施方式的测距装置10相同,所以对相同的构成附加相同的附图标记,并省略其详细的说明。图19所示的第六实施方式的测距处理在追加执行步骤s132这一点与图6所示的第一实施方式的测距处理不同。第六实施方式的测距处理的其它的顺序与第一实施方式相同,所以对相同的顺序附加相同的附图标记,并省略其详细的说明。
117.如图19所示,在步骤s130中,判定为计算出的距离小于阈值距离的情况下(步骤s130:是),距离计算部270判定复合峰部的脉冲宽度是否小于预先设定的阈值宽度(步骤s132)。在本实施方式中,步骤s132的脉冲宽度意味着第一阈值受光强度即、为了决定峰部中的上升时间和下降时间而使用的飞行时间的宽度。另外,在本实施方式中,步骤s132的阈值宽度意味着为了辨别复合峰部是由杂波和来自对象物体的反射光形成的峰部、和由于后述的多重反射而形成的峰部中的哪一个而设定的飞行时间的宽度。一般而言,由于多重反射而形成的峰部的宽度比由杂波和来自对象物体的反射光形成的峰部的宽度大。而且,例如通过实验或者模拟决定并设定能够辨别的阈值宽度。上述的“多重反射”意味着在设置于车辆的后方的反射器等具有较高的反射率的物体(以下,称为“高反射率物体”)与测距装置10之间脉冲光以及所述的反射光往复多次并相互反射。在脉冲光照射到高反射率物体的情况下,其反射光的强度较大。因此,存在如下的情况:所述的反射光在窗92、壳体90内部反射,其反射光再次照射高反射率物体,而再次产生朝向测距装置10的反射光。若反复这样的反射引起多重反射,则生成统合了随着在高反射率物体与测距装置10之间往复,飞行时间tf变长,并且受光强度变小的多个直方图的直方图。
118.例如,在图20的例子中,将通过第一次的反射光得到的直方图hr71、通过第二次的反射光得到的直方图hr72以及通过第三次的反射光得到的直方图hr73合成,得到表示复合峰部mp7的宽度较宽的直方图hr7。在图20的例子中,在得到与第一阈值受光强度i3一致的受光强度的飞行时间tu7、td7中,将在时间上较小的飞行时间tu7确定为上升时间,并将在时间上较大的飞行时间td7确定为下降时间。
119.在图19所示的步骤s132中,判定为复合峰部的脉冲宽度小于预先设定的阈值宽度的情况下(步骤s132:是),执行上述的步骤s135。在复合峰部的脉冲宽度小于预先设定的阈值宽度的情况下,复合峰部由杂波和来自对象物体的反射光构成的可能性较高。因此,该情况下,与第一实施方式同样地,将通过步骤s125计算出的距离确定为对象物距离。
120.与此相对,在判定为复合峰部的脉冲宽度不小于预先设定的阈值宽度的情况下(步骤s132:否),执行上述的步骤s115,通过通常的方法计算对象物距离。即,将上升时间tu7与下降时间td7的中间时间确定为峰值时间,并利用所述的峰值时间确定对象物距离。在判定为复合峰部的脉冲宽度不小于预先设定的阈值宽度的情况下,即在复合峰部的脉冲宽度较大,产生多重反射的可能性较高的情况下,优选基于最初的反射光求出距离。但是,在上述的步骤s135中,将以下降位置为基础飞行时间计算出的距离确定为对象物距离,所以确定精度有可能降低。这是因为起因于反复了多重反射而飞行时间变长,增大的下降时间成为基础飞行时间。因此,在本实施方式中,在这样的情况下不执行步骤s135,而通过通常的方法计算距离并作为对象物距离进行处理。
121.以上说明的第六实施方式的测距装置10具有与第一实施方式的测距装置10相同的效果。除此之外,判定脉冲宽度是否小于阈值宽度,在不小于的情况下,将通过通常的方法计算出的距离确定为对象物距离,所以与对于由于多重反射得到的复合峰部,将下降时间作为基础飞行时间来计算并确定对象物距离的结构相比,能够精度良好地确定对象物距离。
122.g.第七实施方式:
123.第六实施方式的测距装置10a的构成除了测距处理的详细顺序之外,与第二实施方式的测距装置10a相同,所以对相同的构成附加相同的附图标记,并省略其详细的说明。图21所示的第七实施方式的测距处理在代替步骤s108、s120、s123,而执行步骤s117这一点,与图9所示的第二实施方式的测距处理不同。第七实施方式的测距处理的其它顺序与第二实施方式相同,所以对相同的顺序附加相同的附图标记,并省略其详细的说明。
124.如图21所示,在步骤s107中,判定为根部宽度大于阈值宽度的情况下(步骤s107:是),基础飞行时间决定部260分别将上升时间和下降时间决定为基础飞行时间(步骤s117)。在步骤s117完成后,执行上述的步骤s125、s135。在步骤s117中,分别将上升时间和下降时间决定为基础飞行时间,所以在步骤s125中,基于各个基础飞行时间计算距离,在步骤s135中,计算出的两个距离均被确定为对象物距离。如图10所示,在存在两个对象物obj1、obj2的情况下,有时要求分别对两个对象物obj1、obj2求出距离。这例如基于分别正确地确定到在前后存在的两个物体的距离这样的要求。根据本实施方式,由于将上升时间即、源于位于近前侧的对象物的时间作为基础时间求出距离,所以能够精度良好地求出位于近前侧的对象物的对象物距离。另外,由于将下降时间即、源自位于里侧的对象物的时间作为基础时间求出距离,所以能够精度良好地求出位于里侧的对象物的对象物距离。
125.以上说明的第七实施方式的测距装置10a具有与第二实施方式的测距装置10a相同的效果。除此之外,在判定为根部宽度大于阈值宽度的情况下,即来自多个对象物的反射光的直方图所包含的峰部合成得到复合峰部的可能性较高的情况下,分别将上升时间和下降时间决定为基础飞行时间,所以能够分别正确地确定到在前后存在的两个物体为止的距离。
126.h.其它实施方式:
127.(h1)在估计为不存在复合峰部的情况下,即在第一实施方式中判定为反射光的受光位置与杂波的位置不一致的情况下(步骤s110:否),另外,在第二以及第三实施方式中判定为根部宽度不大于阈值宽度的情况下(步骤s107:否),执行步骤s115,将峰部的上升时间
与下降时间的中间时间作为基础飞行时间来计算对象物距离,但本公开并不限定于此。在这样的情况下,也可以将峰部的上升时间和下降时间中的任意一个作为基础飞行时间来计算对象物距离。
128.(h2)在第二以及第三实施方式中,在估计出复合峰部的存在的情况下,根据第一中间时间与第二中间时间的比较结果,将基础飞行时间决定为复合峰部的上升时间或者下降时间,但本公开并不限定于此。例如,也可以在估计出复合峰部的存在的情况下,不执行第一中间时间与第二中间时间的比较而将上升时间决定为基础飞行时间。根据所述的结构,能够容易求出到从测距装置10a观察时位于更前方侧的对象物为止的距离作为对象物距离,能够求出到位于更近处且对于车辆来说影响更大的对象物的距离。
129.(h3)在第二以及第三实施方式中,基础飞行时间决定部260在第一中间时间与第二中间时间相等的情况下,将上升时间决定为基础飞行时间,但也可以代替上升时间,而将下降时间决定为基础飞行时间。
130.(h4)各实施方式中的测距装置10、10a的结构仅为一个例子,能够进行各种变更。例如,在第一实施方式的测距处理中,也可以省略步骤s130。另外,在步骤s135中,也可以重新基于基础飞行时间计算距离,并确定为对象物距离。另外,测距装置10、10a并不限定于车辆,也可以搭载于飞机、船舶等任意的移动体。或者,也可以为了安全等用途,而固定设置并使用。另外,测距装置10、10a的壳体也可以构成为不具有窗部件,而仅设置开口。
131.(h5)本公开所记载的运算部20及其方法也可以由通过构成被编程为执行通过计算机程序具体化的一个或者多个功能的处理器以及存储器提供的专用计算机来实现。或者,本公开所记载的运算部20及其方法也可以由通过由一个以上的专用硬件逻辑电路构成处理器提供的专用计算机来实现。或者,本公开所记载的运算部20及其方法也可以由通过被编程为执行一个或者多个功能的处理器以及存储器与由一个以上的硬件逻辑电路构成的处理器的组合构成的一个以上的专用计算机来实现。另外,计算机程序也可以作为由计算机执行的指令存储于计算机能够读取的非迁移有形记录介质。
132.(h6)在第四实施方式的杂波位置设定处理的步骤s210中生成直方图时,确定成为基础的对象物距离,但也可以根据车辆是否在行驶中,对累计的度数进行加权。具体而言,也可以在车辆行驶中的情况下,与不在行驶中的情况(换句话说,在停车中的情况)相比,累计更大的度数。在车辆在停车中的情况下,到存在于周围的对象物的距离的随着时间经过的变化较小,在近距离的位置存在对象物的情况下,创建在近距离的范围成为较高的频率的直方图的可能性较高。因此,尽管实际上在窗92未附着异物但得到在近距离的范围成为较高的频率的直方图,有可能确定错误的杂波位置。另一方面,在行驶中的情况下,到存在于周围的对象物的距离的随着时间经过的变化较大。因此,即使在近距离的位置存在对象物也是短时间,所以生成在近距离的范围成为较高的频率的直方图的可能性较低。但是,在这样的行驶中在近距离的范围成为高的频率是因为在窗92附着异物而产生杂波的可能性较高。因此,为了在这样的情况下成为较高的频率,也可以在行驶中的情况下,与不在行驶中的情况(换句话说,在停车中的情况)相比,累计更大的度数。此外,也可以代替如上述那样根据是否在行驶中进行加权,而仅在行驶中确定出对象物距离的情况下,进行杂波位置设定处理,在停车中不进行杂波位置设定处理。
133.(h7)在第六实施方式的步骤s132中使用的“阈值宽度”是预先通过实验等确定出
的一个固定值,但本公开并不限定于此。也可以根据复合峰部的下降时间使阈值宽度变化来使用。具体而言,也可以复合峰部的下降时间越大(长),越大地设定阈值宽度。假定在复合峰部的下降时间较大(长)的情况下,多重反射的次数较多。因此,在这样的情况下,通过设定更大的阈值宽度,能够精度良好地辨别在相互相同的方位在进深方向的比较长的范围存在距离不同的多个对象物的情况、和产生多重反射的情况。
134.(h8)在第六实施方式中,在步骤s132中,判定为复合峰部的脉冲宽度不小于预先设定的阈值宽度的情况下(步骤s132:否),执行步骤s115,利用通常的方法,换句话说将中间时间作为基础飞行时间计算距离,但本公开并不限定于此。该情况下,也可以与通常的方法不同,而将上升时间作为基础时间计算距离。如上述那样,在产生多重反射的情况下,求出基于第一次的反射光计算出的距离,作为更接近对象物距离的值。这是因为随着第二次、第三次次数增加,反射光的往复时间相加,偏离正确的飞行时间(到反射物为止的往复时间)。因此,通过成为上述那样的结构,在产生多重反射的状况下,能够精度良好地确定对象物距离。
135.本公开也能够以各种方式实现。例如,能够以测距系统、搭载测距装置的移动体、测距方法、用于实现这些装置、方法的计算机程序、记录有所述的计算机程序的非暂时的记录介质等方式实现。
136.本公开并不限定于上述的实施方式,能够在不脱离其主旨的范围内以各种构成实现。例如,为了解决上述的课题的一部分或者全部,或者,为了实现上述的效果的一部分或者全部,与在发明内容一栏记载的方式中的技术特征对应的各实施方式中的技术特征能够适当地进行替换、组合。另外,若该技术特征在本说明书中未作为必需的技术特征进行说明,则能够适当地删除。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。