1.本发明涉及附接有监视器使得可从仪器的多于一侧观看的台式仪器领域。
背景技术:
2.存在具有监视器屏幕的仪器,其中,提供对监视器上显示的信息从多于一个方向的视觉访问将是有用的。特别是,在对仪器或对仪器正在操作的对象进行调整时,能够从仪器的多于一侧看到监视器上的信息将是有用的。这对于对对象执行眼科或验光测量特别有利,其中例如,从业者可能希望坐在患者旁边以检查他/她是否下巴和前额在正确的位置处正确地坐在机器上,同时观看监视器上的信息。取决于房间的几何形状,有时一侧更优选,而有时是相反侧。可替换地,从业者可能更喜欢坐在患者对面,机器前面。已知现有技术仪器具有数个监视器,诸如每侧一个,使得观看屏幕可从多侧被观看。这种仪器的明显缺点是数个监视器的成本。另一可能的解决方案是围绕仪器的角旋转或回转单个监视器,以便从多个方向可观看。此选项的缺点是,为了容易地越过(clear)仪器的角,需要将监视器附接到一定长度的臂,该一定长度的臂使监视器定位成距离仪器的侧一定距离。监视器与设备之间的距离可能使监视器易受到意外撞击,从而导致监视器、人员或仪器损坏。
3.因此存在对克服现有技术系统和方法的至少一些缺点的解决方案的需要。
4.本说明书中或在其后续或衍生申请中提及的任何公开的披露均以引用方式全文并入本文。
技术实现要素:
5.本公开为具有单个监视器屏幕的仪器提供了新的示例性系统,该监视器屏幕可切换地可定位在仪器的多个侧面处,并且不从仪器凸出明显大于监视器的厚度。该系统利用旋转机构,使监视器能够在仪器的至少一些侧面之间旋转,以绕过仪器的角,并且相对于监视器附接到的几何形状仪器的侧面停在稳定的位置处。这是通过引起监视器在大致平行于监视器所需的旋转平面的平面中跟随固定地安装在仪器上的特殊形状凸轮的外轮廓而实现的,并且该平面大致垂直于仪器面的平面(如果仪器是常见的矩形形状)。该轮廓成形为具有凸出部分和凹陷或凹坑,使得凸出部分引起监视器在通过仪器的角时远离仪器移动,并且凸轮轮廓中的凹陷或凹坑使监视器在其到达仪器的面时能够移动靠近仪器。监视器附接到臂组件上,该臂组件具有枢轴轴承,使臂组件能够围绕仪器旋转。臂组件由两部分组成-安装了枢轴轴承的纵向内部部分,以及相对于内部部分纵向滑动的外部部分,并且监视器安装在该外部部分上。附接在臂组件的内部和外部部分之间的弹簧机构在臂组件的外部部分上施加向内指向的张力,试图将其朝向枢轴接头向内拉。臂组件的外部部分的向内运动由凸轮从动件控制,其可方便地为销,所述销附接到臂组件的外部部分,并且其跟随凸轮的轮廓。为了减少摩擦,销可具有装配到其的轴承,诸如滚子或滚针或套筒轴承,并且本公开中与凸轮从动件有关的术语销的所有引用旨在包括这样的替代方案,并且不仅限于销。向内指向的力确保销保持与凸轮轮廓接触,并随着臂组件旋转跟随凸轮轮廓。随着臂组件
旋转,臂组件中的销跟随凸轮的外轮廓,并且将监视器向外移动以绕过仪器的角。随着监视器通过平行于仪器面的位置,监视器被朝向仪器面向内拉回。
6.凸轮轮廓成形为使得,当凸轮从动件在凸轮轮廓凹陷中的一个处到达凸轮上的新平衡点,即弹簧机构的最小势能位置时,监视器随之静止在平行并靠近仪器的另一侧的位置处。以这种方式,监视器可容易地定位在仪器的两侧或三侧,处于使监视器靠近仪器的静止位置。
7.应当理解,尽管本公开中描述的系统最常用于使监视器能够绕过仪器的拐角,并且这是本公开中大致描述的系统的情况,这种机构也可用于确保监视器不会在角以外的位置碰撞任何延伸超出仪器表面的凸出,并且该系统旨在覆盖所有此类凸出特征,无论是角还是其他障碍物。该系统也因此被要求包括避开所有这些障碍物。
8.一个示例性实施方式涉及用于围绕仪器旋转监视器的机构,该机构包括:
9.(i)凸轮,该凸轮在大致平行于监视器的旋转平面的平面中固定地安装在仪器上,该凸轮的外轮廓具有指向朝向仪器的凸出特征的至少一个凸角,
10.(ii)可延伸臂组件,该可延伸臂组件包括:附接到监视器的外区段和借助于旋转轴承附接到仪器的内区段,可延伸组件臂的外区段滑动地附接到可延伸组件臂的内区段,并且具有弹簧机构,其适配为沿着朝向旋转轴承的方向对外区段施加张力,以及
11.(iii)凸轮从动件,该凸轮从动件附接到可延伸臂组件的外区段使得随着可延伸臂组件旋转,凸轮从动件追随凸轮的外轮廓,从而引起可延伸臂的外区段也追随凸轮的外轮廓。
12.在这样的机构中,凸出特征可以是仪器的角。
13.此外,凸轮从动件可以是销或轴承,其适配为沿凸轮的外轮廓滑动或滚动。在上述任一种情况下,凸轮的外轮廓还可包括至少一个凹陷,该凹陷定位为比凹陷的任一侧上的区域更靠近旋转轴承,凹陷定位为使得当可延伸臂组件处于穿通过凹陷的角度时,监视器定位为沿仪器的侧,并且紧靠仪器的该侧。在本公开中,术语凹陷可理解为凸轮的外轮廓相对于凹口的任一侧轮廓的周围部分的逐渐凹口。
14.在任何上述机构中,凸轮凸角的外边缘距旋转轴承的距离可以是这样的,即当可延伸臂组件处于穿通过仪器的凸出特征的角度时,监视器定位成超出仪器的角。
15.此外,凸角可使得在旋转轴承和从旋转轴承到凸轮凸角的外边缘的最远点之间的线穿通过或靠近仪器的凸出特征。
16.可延伸臂组件可包括:两个盘件,所述两个盘件连接为使得一个盘件沿着另一盘件滑动,或者其可包括:两个圆柱形元件,所述两个圆柱形元件连接为使得一个圆柱形元件在另一圆柱形元件内滑动。
附图说明
17.结合附图,从以下详细描述中将更全面地理解和了解本公开的实施方式,其中:
18.图1a-b示出了用于从不同角度观看仪器的监视器的现有技术解决方案;
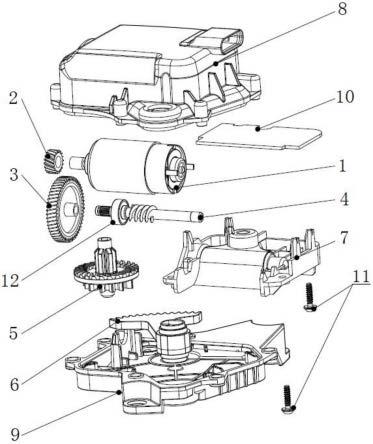
19.图2示出了本公开中描述的监视器布置的示例性实施方式的等距视图;
20.图3a-b以平面图(图3a)和侧视图(图3b)描绘了监视器定位器的示例性实施方式的元件;以及
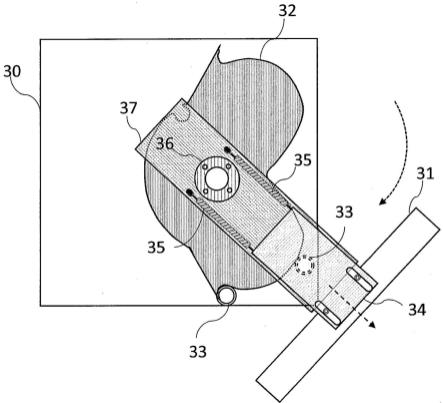
21.图4a-b示出了随着监视器借助于凸轮机构围绕仪器的角移动,监视器及其附接臂的两个位置。
具体实施方式
22.现在参考图1a,其示出了仪器10的现有技术配置的俯视图,该仪器具有附接到其数个面的监视器11,使得其可从所述数个面被观看。具有数个监视器,每个监视器都附接到仪器的一侧,提供了从多个角度观看仪器输出的必要能力。此解决方案具有明显的成本缺点。图1b示出了另一现有技术的解决方案,其中,监视器11借助于在监视器和仪器之间延伸的连接臂12围绕仪器10旋转,并且其围绕靠近仪器中心定位、与仪器的相反侧等距的单个固定点13旋转。在此指向上,监视器11必须与仪器保持足够的距离以便在旋转期间绕过仪器的角,如虚线圆所示。与直接附接到仪器前面的单个监视器相比,这种配置将导致监视器需要显著的更多的空间。将监视器悬挂在距仪器面一定距离还会对监视器或在仪器周围行走的人员造成附加的损害风险。使用宝贵的办公空间和损害的可能性两者都是此解决方案的缺点。
23.现在参考图2,示出了本公开的示例性实施方式的等距示意性整体视图,具有定位在仪器20的一侧的表面上的单个监视器21,监视器通过连接杆或臂27附接到该仪器。仪器20可定位在诸如地板、桌子或桌面24的稳定表面上的固定位置中。臂27在此示例性实施方式中,在一端处借助于枢轴轴承26被紧固到仪器顶部,使得其可自由旋转。臂27的另一端附接到监视器21。如同将要结合图3a和3b示出的,使用本公开的新特征,监视器21能够旋转到位置21',其中该监视器将与仪器的另一面齐平,但在其旋转时不会与仪器的角碰撞。
24.现在参考图3a和图3b,其示出了图2的仪器的示例性实施方式的机构,使得监视器31能够以一方式围绕仪器回转,所述方式使得监视器能够越过(clear)仪器的角,并且当监视器的旋转使监视器相反一面定位时仍保持监视器与该面齐平。该系统能够旋转监视器到原始位置的任一侧或两侧。旋转机构可允许臂旋转超过360度,允许从仪器的任一侧观看监视器。
25.首先参考图3a,示出了监视器31如何通过可延伸臂37围绕旋转轴承36回转。系统还包括安装在仪器上的凸轮形件32,凸轮从动件33跟随其轮廓。凸轮32可固定地附接到仪器30的顶部或底部。在本公开示出的示例中,监视器旋转机构示出为安装在仪器的顶部,尽管应该理解这只是一个选项,并且其也可安装在底部上,或者甚至在顶部和底部两者上。监视器借助于可延伸臂37附接到安装在仪器顶部上的旋转轴承36,使得监视器可在臂37的末端上围绕仪器摆动。臂37是可延伸的,使得随着监视器接近仪器的凸出角,臂可延伸使得监视器不会碰撞仪器的角。臂的外部可延伸部分34借助于弹簧元件35附接到臂的内部部分,该弹簧元件在臂的所述两个部分之间产生张力,使得如果没有被外部元件阻止的话,弹簧元件倾向于缩短臂的长度。附接到臂37的外部可延伸部分34的凸轮从动件33是这种元件,并且随着臂和监视器旋转,凸轮从动件33沿着固定地安装在仪器上的凸轮32的表面轮廓运行。凸轮轮廓成形为使得当监视器位于仪器的前侧时,凸轮从动件在凸轮轮廓的凹陷中,该凹陷是凸轮该扇区中凸轮轮廓的离轴承36的最近点;从凸轮从动件33到轴承36的距离,联同臂的所述两个部分的长度,使得监视器31基本上坐落于或靠近仪器的面。这是弹簧系统势能最小的位置,其操作以朝向轴承拉监视器。在远离凸轮凹陷的任一侧移动,凸轮轮廓具
有朝向仪器的角向外延伸的凸角,当其到达角时从轴承轴线到凸角最远点的距离使得凸轮从动件33推动可延伸臂的外区段,足以使监视器刚好越过角。凸轮轮廓32成形为使得在监视器越过角之后,凸轮从动件33再次被允许移动更靠近轴承,直到其到达凸轮轮廓中的第二凹陷38,其距轴承轴线一定距离定位,该距离使得监视器位于或靠近仪器的侧面。对于对称形状的仪器,凸轮大致具有双边对称性,使得在仪器的相反侧上具有引起监视器坐落于相反面上的第二凹陷39的类似的轮廓被呈现。如果仪器不是直线的,则凹陷38、39的对齐位置可与前凹陷33以90
°
以外定位。在图3a中,示出了凸轮从动件的三个可能位置。除了凸轮从动件33定位在的位置之外,向右或向左移动将导致凸轮从动件跟随向外的弧形轨迹,从而使监视器避开仪器的角,并且将在由虚线圆38或39表示的两个位置中的任一个中静止。应当理解,本例是本公开的一个示例性实施方式。在一些实施方式中,可使用凸轮32的替代形状配置,使得监视器具有更稳定的位置和观看角度。
26.现在参考图3b,示出了图3a的实施方式的侧视图。此视图示出了各种部件是如何连接和附接的。旋转轴承36可固定地附接到仪器30,并且可延伸臂37围绕轴承旋转。在此实施方式中,示出了可延伸臂37的外部可延伸部分34,外部部分34沿着狭槽滑动,该狭槽沿着相对于旋转轴承径向稳态的可延伸臂的内部部分的长度。这种用于提供径向或纵向滑动移动的布置只是一个推荐的实施方式,并且任何其他合适的布置也是可行的,诸如管对,一个在另一个内滑动(图中未示出)。弹簧35应该选择为使得它们具有足够的张力以将监视器牢固地保持就位,但能够延伸以便将监视器向外移动远离旋转轴承而无需过度用力。将外部可延伸部分34附接到臂37的内部部分的销允许外部可延伸部分34和监视器相对于内臂37纵向移动或滑动,如虚线箭头所示,随着凸轮从动件33围绕凸轮32横向移动,随之移动监视器。
27.现在参考图4a和图4b,示出了随着监视器31围绕仪器30顶部的枢轴轴承36旋转的在操作中的凸轮机构。维持监视器31的臂的外区段34借助于弹簧组35或其他张紧机构附接到臂37的内区段。随着臂旋转离开其监视器最靠近仪器的位置,凸轮从动件33靠在凸轮轮廓32上,推动臂的外区段34,并且因此还将监视器31远离枢轴36,随着监视器旋转拉伸弹簧35以保持凸轮从动件与凸轮轮廓接触。监视器的移动轨迹由凸轮32的形状以及由凸轮从动件33沿凸轮边缘的移动控制。因为凸轮从动件33固定地附接到外部可延伸部分34,外部可延伸部分34以及因此监视器31的运动受到凸轮从动件33沿凸轮32轮廓的路径的限制。臂37的运动被限制为围绕旋转轴承36旋转。监视器远离仪器的纵向运动由于弹簧35的拉伸得以实现,这允许外臂区段34相对于臂37滑动。如图4b所示,当凸轮从动件到达凸轮上的凹口时,监视器31布置为从其原始位置到平行于仪器30的相邻侧静止。以相反方向旋转监视器将导致监视器定位在仪器的与4b中的位置相反面上。取决于监视器的期望位置,在其他实施方式中,凸轮可制成任何数量的有用形状,这些形状适于仪器的形状并实现监视器或其他附接元件的期望移动。
28.尽管本公开的实施方式集中在垂直监视器到台式仪器的可移动附接上,应当理解,所公开的凸轮从动件和凸轮机构的实施方式可应用于任何数量的其他情况。相同的机构可应用于任何需要将一个部件维持在相对于主体的数个可旋转位置的设备或工具。
29.因此,本领域技术人员可以理解,本发明不受上文具体示出和描述的内容的限制。相反,本发明的范围包括上文描述的各种特征的组合和子组合,以及本领域技术人员在阅
读上述描述后会想到的并且不属于现有技术的变化和修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。