技术特征:
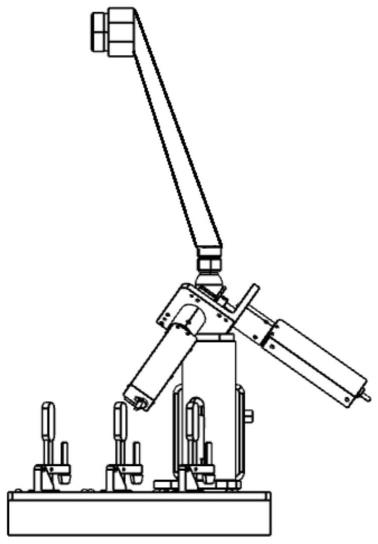
1.一种多功能机器人标定测量杆,包括测量杆,其特征在于,所述测量杆的一端连接于机械臂末端,测量杆的另一端连接于测量组件;所述测量杆为直杆和/或弯杆中的一种或其组合;所述测量组件为3d测量组件或6d测量组件。2.根据权利要求1所述的一种多功能机器人标定测量杆,其特征在于,所述测量杆为直杆,所述直杆通过关节连接于机械臂末端,直杆的轴线方向与末端关节轴线方向呈一定的夹角,该夹角为30
°‑
90
°
,所述直杆的长度为机器人最大工作半径的10%-100%。3.根据权利要求1所述的一种多功能机器人标定测量杆,其特征在于,所述测量杆为弯杆,弯杆具有至少一个弯折部,或者弯杆是通过圆弧进行过渡的弧形杆,弯杆的初始段的方向与最终段的方向之间的夹角为90
°‑
150
°
。4.根据权利要求1所述的一种多功能机器人标定测量杆,其特征在于,所述测量杆为直杆与弯杆的组合,弯杆的两端分别连接有至少一段直杆;所述弯杆连接的前后两段直杆之间的夹角为90
°‑
150
°
,所述弯杆连接的前后两段直杆的长度均为机器人最大工作半径的10%-100%。5.根据权利要求1所述的一种多功能机器人标定测量杆,其特征在于,所述测量杆由不同外径的杆段组合而成,不同杆段的外径从初始段到最终段逐渐缩小;所述测量杆为空心管状以减少重量;所述测量杆的材料为金属、碳纤维、塑料、陶瓷的一种或多种组合。6.根据权利要求1~5中任一项所述的一种多功能机器人标定测量杆,其特征在于,所述3d测量组件为3d测量头,3d测量头具有一个球面,在使用过程中球面接触标定测量装置,并通过位移传感器检测机械臂作绕球心运动时3d测量头的球心的位置误差量。7.根据权利要求6所述的一种多功能机器人标定测量杆,其特征在于,所述3d测量头的球面的球径为10-100mm,3d测量头的球面的圆度误差小于20微米;所述3d测量头设有测量球与连接组件,连接组件上设有定位锥面,定位锥面后设有螺杆,测量球球心在定位锥面的轴线上,并通过锥面进行定位,确保测量球重复装夹时球心的重复定位精度。8.根据权利要求1~5中任一所述的一种多功能机器人标定测量杆,其特征在于,所述6d测量组件为6d测量头,6d测量头设有多个测量平面,每个测量平面的平面度误差小于0.1mm,且多个测量平面之间呈一定角度分布,该角度的范围为0
°‑
150
°
。9.根据权利要求1~5中任一项所述的一种多功能机器人标定测量杆,其特征在于,所述6d测量组件包括6个测量平面,所述6个测量平面可以分为3组,同一组内的所有测量平面共同连成一个大平面,每组的数量为“1-2-3”或“2-2-2”;每个所述大平面为一块测量板,每个测量板的平面度误差小于0.1mm,3块测量板均固定在连接组件b上,固定方式为粘接、螺纹、焊接、卡扣的一种或组合。10.根据权利要求1所述的一种多功能机器人标定测量杆,其特征在于,所述3d测量组件或6d测量组件与测量杆末端通过快拧法兰连接固定,所述快拧法兰通过螺纹安装固定;所述测量杆通过连接法兰安装固定于机械臂末端,所述连接法兰包括连接法兰a与连接法兰b,两者通过螺纹安装连接,螺纹的中径大于50mm,所述连接法兰a通过螺栓固定在机械臂末端,所述连接法兰b与测量杆连接,通过连接法兰可以将不同规格的测量杆与机械臂末端快速更换连接。
技术总结
本实用新型公开一种多功能机器人标定测量杆,包括测量杆,所述测量杆的一端连接于机械臂末端,测量杆的另一端连接于测量组件;所述测量杆为直杆和/或弯杆中的一种或其组合;所述测量组件为3D测量组件或6D测量组件。本实用新型功能多样,能够根据不同的测量需求选用相应的测量杆以及连接测量组件,从而实现多种不同的机器人测量功能,保障了标定或测量的便捷性和精准性。捷性和精准性。捷性和精准性。
技术研发人员:万梓威 周春琳 张标 曹云豪 高凯梁 朱金力 郭红亮 刘顿
受保护的技术使用者:浙江大学湖州研究院
技术研发日:2022.10.28
技术公布日:2023/2/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。