1.本公开涉及一种考虑存在于车辆的周围的风险来设定车辆的驾驶条件的驾驶辅助装置。
背景技术:
2.已知考虑存在于本车辆的周围的风险来设定本车辆的行驶轨迹或者车速的驾驶辅助装置。例如,在专利文献1中提出了一种驾驶辅助装置,其将不明显化的风险与明显化的风险一并考虑来设定行驶轨迹。具体地,在专利文献1中公开了如下所述的驾驶辅助装置:该驾驶辅助装置分别运算表示本车辆按照道路形状而行驶的情况下的行驶位置的推荐程度的基本潜力、基于由风险对象物信息示出的明显风险的明显潜力、以及基于从本车辆的行驶场景的预测结果预测的潜在风险的潜在潜力,并基于通过将基本潜力、明显潜力以及潜在潜力相加而得到的潜力场来设定本车辆应行驶的行驶轨迹。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018-192954号公报
技术实现要素:
6.技术问题
7.在专利文献1中记载了风险的大小根据道路环境和/或天气等而变化的情况,并作为具体例,记载了根据护栏的有无和/或道路宽度的大小来变更从死角突然出现的潜在风险的情况。然而,专利文献1的驾驶辅助装置没有考虑本车辆的行驶轨迹根据外部环境因素而从控制目标偏离的情况。具体地,专利文献1的驾驶辅助装置基于本车辆沿着控制目标行驶的情况下的明显风险和潜在风险来进行风险运算,并未考虑本车辆的行驶轨迹根据外部环境因素而偏离的情况下的风险。因此,在基于由专利文献1的驾驶辅助装置设定的行驶轨迹来设定本车辆的驾驶条件的情况下,有可能由于路面的冻结、道路坡度、强风的影响而使本车辆的行驶轨迹偏离并接近风险对象物,或者使本车辆的乘员感到不安。
8.本公开是鉴于上述问题而完成的,本发明的目的在于提供一种驾驶辅助装置,其能够进行考虑了由外部环境因素所引起的本车辆的行驶轨迹的偏离的风险运算,并设定本车辆的驾驶条件。
9.技术方案
10.为了解决上述问题,根据本公开的一个观点,提供一种驾驶辅助装置,其基于对存在于车辆周围的风险对象物赋予潜在风险而生成的风险图来设定车辆的驾驶条件,该驾驶辅助装置具备:一个或多个处理器、以及以能够与一个或多个处理器通信的方式连接的一个或多个存储器,处理器执行的处理,包括:获取车辆的周围环境的信息;获取可能成为车辆的行驶轨迹偏离的原因的外部环境因素的信息;以及基于外部环境因素的信息,将位于所设想的偏离的方向上的风险对象物的潜在风险的设定范围扩大。
11.此外,为了解决上述问题,根据本公开的另一观点,提供一种驾驶辅助装置,其基于对存在于车辆周围的风险对象物赋予潜在风险而生成的风险图来设定车辆的驾驶条件,该驾驶辅助装置具备:获取部,其获取车辆的周围环境的信息、以及可能成为车辆的行驶轨迹偏离的原因的外部环境因素的信息;风险图生成部,其基于外部环境因素的信息,将位于所设想的偏离的方向上的风险对象物的潜在风险的设定范围扩大而生成风险图;以及驾驶条件设定部,其基于风险图来设定车辆的驾驶条件。
12.技术效果
13.如以上所说明,根据本公开,能够进行考虑了由外部环境因素所引起的本车辆的行驶轨迹的偏离的风险运算,并设定本车辆的驾驶条件。
附图说明
14.图1是示出具备本公开的第一实施方式的驾驶辅助装置的车辆的构成例的示意图。
15.图2是示出第一实施方式的驾驶辅助装置的构成例的框图。
16.图3是示出设定于风险对象物的潜在风险的例子的说明图。
17.图4是示出基于基本潜在风险设定的目标轨道的例子的说明图。
18.图5是示出由低摩擦区域引起的行驶轨迹的偏离的说明图。
19.图6是示出由该实施方式的驾驶辅助装置进行的潜在风险和目标轨道的设定例的说明图。
20.图7是示出根据路面状态设定的潜在风险的说明图。
21.图8是示出由该实施方式的驾驶辅助装置进行的处理动作的流程图。
22.图9是示出由该实施方式的驾驶辅助装置进行的处理动作的流程图。
23.图10是示出由第二实施方式的驾驶辅助装置进行的潜在风险和目标轨道的设定例的说明图。
24.图11是示出由该实施方式的驾驶辅助装置进行的潜在风险和目标轨道的设定例的说明图。
25.图12是示出由该实施方式的驾驶辅助装置进行的处理动作的流程图。
26.图13是示出第三实施方式的驾驶辅助装置的构成例的框图。
27.图14是示出根据驾驶员对风险对象物的敏感度而设定的潜在风险的说明图。
28.图15是示出由该实施方式的驾驶辅助装置进行的处理动作的流程图。
29.图16是示出第四实施方式的驾驶辅助装置的构成例的框图。
30.图17是示出由风的影响引起的行驶轨迹的偏离的说明图。
31.图18是示出由该实施方式的驾驶辅助装置进行的潜在风险和目标轨道的设定例的说明图。
32.图19是示出由该实施方式的驾驶辅助装置进行的处理动作的流程图。
33.符号说明
34.1:车辆(本车辆);31:周围环境传感器;33:路面检测传感器;35:车辆状态传感器;41:车辆控制装置;50:驾驶辅助装置;51:控制部;53:存储部;61:获取部;63:路面摩擦状态判定部;65:风险图生成部;67:驾驶条件设定部;69:驾驶员判定部;70:驾驶辅助装置;71:
驾驶员数据库;73:驾驶特性数据库;80:驾驶辅助装置;81:风速传感器;91:停车车辆;t1、t2、t3、t4、t5:目标轨道
具体实施方式
35.以下,参照附图对本公开的优选实施方式详细地进行说明。应予说明,在本说明书和附图中,对实质上具有相同的功能构成的构成要素通过标记相同的符号而省略重复说明。
36.《1.第一实施方式》
37.《1-1.车辆的整体构成》
38.首先,对能够应用本公开的第一实施方式的驾驶辅助装置的车辆的整体构成的一例进行说明。
39.图1是示出具备本实施方式的驾驶辅助装置50的车辆1的构成例的示意图。图1所示的车辆1被构成为将从生成车辆的驱动扭矩的驱动力源9输出的驱动扭矩向左前轮3lf、右前轮3rf、左后轮3lr以及右后轮3rr(以下,在不需要特别区分的情况下总称为“车轮3”)传递的四轮驱动车。驱动力源9既可以是汽油发动机、柴油发动机等内燃机,也可以是驱动用马达,还可以同时具备内燃机和驱动用马达。
40.应予说明,车辆1例如可以是具备前轮驱动用马达和后轮驱动用马达这两个驱动用马达的电动汽车,也可以是具备与各个车轮3对应的驱动用马达的电动汽车。此外,在车辆1为电动汽车或混合动力电动汽车的情况下,在车辆1搭载有储存向驱动用马达供给的电力的二次电池、产生对电池充电的电力的马达、燃料电池等发电机。
41.车辆1具备驱动力源9、电动转向装置15以及制动液压控制单元20作为用于车辆1的驾驶控制的设备。驱动力源9输出经由未图示的变速器、前轮差动机构7f以及后轮差动机构7r传递到前轮驱动轴5f和后轮驱动轴5r的驱动扭矩。驱动力源9和/或变速器的驱动由包括一个或多个电子控制装置(ecu:electronic control unit)而构成的车辆控制装置41来控制。
42.在前轮驱动轴5f设置有电动转向装置15。电动转向装置15包括未图示的电动马达和/或齿轮机构,并通过由车辆控制装置41控制来调节左前轮3lf和右前轮3rf的转向角。车辆控制装置41在手动驾驶过程中,基于驾驶员所操作的方向盘13的转向角来控制电动转向装置15。此外,车辆控制装置41在自动驾驶过程中基于由驾驶辅助装置50设定的目标转向角来控制电动转向装置15。
43.车辆1的制动系统被构成为液压式的制动系统。制动液压控制单元20调节向分别设置于前后左右的驱动轮3lf、3rf、3lr、3rr的制动钳17lf、17rf、17lr、17rr(以下,在不需要特别区分的情况下总称为“制动钳17”)供给的液压,并产生制动力。制动液压控制单元20的驱动由车辆控制装置41控制。在车辆1为电动汽车或混合动力电动汽车的情况下,制动液压控制单元20与由驱动用马达进行的再生制动并用。
44.车辆控制装置41包括对输出车辆1的驱动扭矩的驱动力源9、控制方向盘13或转向轮的转向角的电动转向装置15、以及控制车辆1的制动力的制动液压控制单元20的驱动进行控制的一个或多个电子控制装置。车辆控制装置41也可以具备对将从驱动力源9输出的驱动扭矩变速而向车轮3传递的变速器的驱动进行控制的功能。车辆控制装置41被构成为
能够获取从驾驶辅助装置50发送的信息,并被构成为能够执行车辆1的自动驾驶控制。此外,车辆控制装置41在车辆1的手动驾驶时,获取驾驶员的驾驶的操作量的信息,并对输出车辆1的驱动扭矩的驱动力源9、控制方向盘13或者转向轮的转向角的电动转向装置15、以及控制车辆1的制动力的制动液压控制单元20的驱动进行控制。
45.此外,车辆1具备前方拍摄相机31lf、31rf、后方拍摄相机31r、lid ar(light detection and ranging:光探测与测距)31s、路面检测传感器33、车辆状态传感器35、gps(global positioning system:全球定位系统)传感器37、导航系统40以及hmi(human machine interface:人机接口)43。
46.前方拍摄相机31lf、31rf、后方拍摄相机31r以及lidar31s构成用于获取车辆1的周围环境的信息的周围环境传感器。前方拍摄相机31lf、31rf以及后方拍摄相机31r拍摄车辆1的前方或后方,并生成图像数据。前方拍摄相机31lf、31rf以及后方拍摄相机31r具备ccd(charged-coupled devices:电荷耦合器件)或者cmos(complementary metal-oxide-semicon ductor:互补金属氧化物半导体)等拍摄元件,并向驾驶辅助装置50发送所生成的图像数据。
47.虽然在图1所示的车辆1中,前方拍摄相机31lf、31rf被构成为包括左右一对相机的立体相机,后方拍摄相机31r被构成为所谓的单目相机,但也可以分别是立体相机和单目相机中的任意一种。车辆1除了前方拍摄相机31lf、31rf以及后方拍摄相机31r以外,也可以具备例如设置于侧后视镜11l、11r而拍摄左后方或者右后方的相机。
48.lidar31s发送光学波并且接收该光学波的反射波,基于从发送光学波起到接收反射波为止的时间来检测物体以及到物体的距离。lidar31s向驾驶辅助装置50发送检测数据。作为用于获取周围环境的信息的周围环境传感器,车辆1也可以具备毫米波雷达等雷达传感器、超声波传感器中的任意一个或多个传感器来代替lidar31s或者与lidar31s一并具备。
49.路面检测传感器33被构成为包括用于检测车辆1的前方的路面摩擦状态的一个或多个传感器。例如,路面检测传感器33被构成为包括前方拍摄相机31lf、31rf、非接触温度传感器、近红外线传感器、激光传感器(tof(time of flight:飞行时间)传感器)中的多个传感器的复合传感器。路面检测传感器33向驾驶辅助装置50发送检测信号。前方拍摄相机31lf、31rf的检测信号被用作检测路面的颜色的信息。非接触温度传感器的检测信号被用作检测外部气温或路面温度中的至少一个的信息。近红外线传感器的检测信号被用作检测路面水分百分比的信息。激光传感器的检测信号被用作检测路面的粗糙度的信息。
50.车辆状态传感器35包括检测车辆1的操作状态和行为的一个或多个传感器。车辆状态传感器35包括例如转向角传感器、加速器位置传感器、制动器行程传感器、制动压力传感器或发动机转速传感器中的至少一个,并检测方向盘13或转向轮的转向角、加速器开度、制动器操作量或发动机转速等车辆1的操作状态。此外,车辆状态传感器35包括例如车速传感器、加速度传感器、角速度传感器中的至少一个,并检测车速、纵向加速度、横向加速度、横摆角速度等车辆的行为。车辆状态传感器35向驾驶辅助装置50发送包含检测到的各种信息的传感器信号。
51.导航系统40是设定直到由乘员设定的目的地为止的行驶路径并将该行驶路径通知给驾驶员的公知的导航系统。在导航系统40连接有gps传感器37,介由gps传感器37接收
来自gps卫星的卫星信号,并获取车辆1在地图数据上的位置信息。应予说明,也可以代替gps传感器37,而使用接收来自确定车辆1的位置的其他卫星系统的卫星信号的天线。
52.hmi43由驾驶辅助装置50驱动,并通过图像显示和/或声音输出等手段对驾驶员提示各种信息。hmi43包括例如设置于仪表板内的显示装置以及设置于车辆的扬声器。显示装置可以具有导航系统40的显示装置的功能。此外,hmi43也可以包括在车辆1的前窗上显示图像的平视显示器。
53.《1-2.驾驶辅助装置》
54.接下来,对本公开的第一实施方式的驾驶辅助装置50具体地进行说明。
55.(1-2-1.构成例)
56.图2是示出本实施方式的驾驶辅助装置50的构成例的框图。
57.在驾驶辅助装置50经由专用线或者can(controller area network:控制器局域网)和/或lin(local inter net:局域互联网)等通信手段连接有周围环境传感器31、路面检测传感器33以及车辆状态传感器35。此外,在驾驶辅助装置50经由专用线或者can和/或lin等通信手段连接有导航系统40、车辆控制装置41以及hmi43。应予说明,驾驶辅助装置50不限于搭载于车辆1的电子控制装置,也可以是智能手机和/或可穿戴设备等终端装置。
58.驾驶辅助装置50具备控制部51和存储部53。控制部51被构成为具备一个或多个cpu(central processing unit:中央处理单元)等处理器。控制部51的一部分或全部可以由固件等能够更新的部件构成,另外,也可以是根据来自cpu等的指令而执行的程序模块等。存储部53由ram(random access memory:随机存取存储器)或rom(read only memory:只读存储器)等存储器构成。其中,存储部53的数量、种类没有特别限定。存储部53记录有由控制部51执行的计算机程序、用于运算处理的各种参数、检测数据、运算结果等信息。
59.(1-2-2.功能构成)
60.如图2所示,驾驶辅助装置50的控制部51具备获取部61、路面摩擦状态判定部63、风险图生成部65以及驾驶条件设定部67。这些各部是通过由cpu等处理器执行计算机程序而实现的功能,但各部中的一部分或全部也可以使用模拟电路构成。以下,在对控制部51的各部的功能简单地进行说明之后,具体地说明控制部51的处理动作。
61.(获取部)
62.获取部61执行获取与本车辆1相关的各种信息的处理。具体地,获取部61针对每个预定的运算周期获取本车辆1的行驶状态的信息以及本车辆1的周围环境的信息,并将这些信息记录于存储部53。本车辆1的行驶状态的信息包括由车辆状态传感器35检测到的、方向盘或转向轮的转向角、加速器开度、制动器操作量或发动机转速等车辆1的操作状态、以及车速、纵向加速度、横向加速度、横摆角速度等车辆的行为的信息。
63.本车辆1的周围环境的信息包括由周围环境传感器31检测到的、存在于本车辆1的周围的风险对象物的种类、尺寸(宽度、高度以及进深)、位置、从本车辆1到风险对象物为止的距离、以及本车辆1与风险对象物的相对速度的信息。风险对象物包括例如行驶中的其他车辆、停车车辆、行人、自行车、侧壁、路缘石、护栏、建筑物、电线杆、交通标志、交通信号机、自然物、其他存在于本车辆1的周围且可能发生与本车辆1的碰撞风险的所有物体。此外,本车辆1的周围环境的信息也可以包含道路上的边界线的信息。
64.此外,本车辆1的周围环境的信息包括由路面检测传感器33检测到的、与本车辆1
的行进方向上的路面的摩擦状态相关的信息。与路面的摩擦状态相关的信息包括由前方拍摄相机31lf、31rf以及路面检测传感器33检测到的、路面的颜色、外部气温或者路面温度、路面水分百分比以及路面的粗糙度中的任意一个或者多个信息。
65.(路面摩擦状态判定部)
66.路面摩擦状态判定部63基于由获取部61获取的与路面的摩擦状态相关的信息,执行判定本车辆1的行进方向上的路面摩擦状态的处理。路面摩擦状态判定部63针对本车辆1的行进方向上的路面的每个区域判定路面摩擦状态。路面摩擦状态被判别为例如“干燥”、“潮湿”、“积雪”或“结冰”中的任意一个。路面摩擦状态判定部63可以针对预先设定的每个分区来判别路面摩擦状态,也可以生成路面摩擦状态图。具体地,路面摩擦状态判定部63不仅将本车辆1的行进方向上的路面的整个区域判别为“干燥”、“潮湿”、“积雪”或“结冰”中的任意一个,而且在例如路面的一部分残留有积水、冻结部分或积雪的情况下,将该区域判别为“潮湿”、“积雪”或“结冰”中的任意一个,并且将其他区域判别为“干燥”。此外,路面摩擦状态判定部63在将路面摩擦状态判定为“干燥”的情况下,还可以推定路面材质。路面材质被判别为例如“沥青”、“混凝土”或“砂砾”中的任意一种。
67.(风险图生成部)
68.风险图生成部65执行如下处理:在本车辆1的自动驾驶时,基于存在于本车辆1的周围的风险对象物的基本潜在风险的信息和可能成为本车辆1的行驶轨迹偏离的原因的外部环境因素的信息来生成风险图。在本实施方式中,作为外部环境因素的信息,而基于本车辆1的行进方向上的路面摩擦状态的信息来生成风险图。具体地,风险图生成部65对存在于本车辆1的周围的风险对象物分别设定基本潜在风险。此外,风险图生成部65在行进方向上的路面的状态为“潮湿”、“积雪”和“结冰”中的任意一个的情况下,预测本车辆1的行驶轨迹的偏离,并进行将位于所设想的偏离的方向上的风险对象物的潜在风险的设定范围扩大的校正。然后,风险图生成部65通过将各个风险对象物的潜在风险的空间上的重叠相加,从而求出表示与多个风险对象物碰撞的碰撞风险的风险图(潜力场)。
69.(驾驶条件设定部)
70.驾驶条件设定部67在本车辆1的自动驾驶时,基于由风险图生成部65生成的风险图的信息来设定本车辆1的驾驶条件。具体地,驾驶条件设定部67在本车辆1的自动驾驶时,将风险值成为最小的行驶轨迹设定为本车辆1的目标轨道。在本实施方式中,驾驶条件设定部67以风险值成为预定的风险阈值以下的方式设定本车辆1的目标车速。驾驶条件设定部67基于设定的目标轨道和目标车速的信息来设定目标转向角和目标加减速度,并向车辆控制装置41发送这些信息。接收到驾驶条件的信息的车辆控制装置41基于所设定的驾驶条件的信息来控制各个控制装置的驱动。
71.《1-3.基于潜在风险的驾驶条件的设定处理》
72.(1-3-1.潜在风险的概要)
73.在对驾驶辅助装置50的具体处理进行说明之前,对由驾驶辅助装置50执行的基于潜在风险的驾驶条件的设定处理的概要简单地进行说明。
74.图3是示出针对每个风险对象物设定的潜在风险的说明图。在图3中示出了设定于车辆的潜在风险的例子。以预先设定的本车辆1的基准位置为重心(x,y=0,0)的二维坐标系的各坐标位置(x,y)处的潜在风险的值(风险值)rpi在预先设定的风险对象物(车辆)的
基准位置(x0,y0)处成为最大值,并且越远离基准位置则风险值rpi越小。基准位置可以是俯瞰例如本车辆1或者风险对象物的情况下的重心的位置。风险值rpi能够由相对于距基准位置的距离的指数函数来表示,例如由下述式(1)表示。
75.【数学式1】
[0076][0077]
rpi:风险值
[0078]ci
_var:增益
[0079]
σi:坡度系数
[0080]
r:表示路面状态的系数
[0081]
x0,y0:风险对象物的基准位置的坐标
[0082]
i:用于区分风险对象物的编号
[0083]
例如,风险值rpi的最大值被设定为“1”,各坐标位置处的风险值rpi被规定在“0”至“1”的范围内。但是,风险值rpi的最大值作为依赖于风险对象物的种类的值,也可以针对每个风险对象物进行设定。例如,在风险对象物为“车辆”或“高度低的路缘石”的情况下,设为与车辆碰撞的风险比与高度低的路缘石碰撞的风险高,从而设定于“车辆”的风险值rpi的最大值被设定为比设定于“高度低的路缘石”的风险值rpi的最大值大的值。
[0084]
增益ci_var是根据本车辆1与风险对象物之间的相对关系而设定的权重值,并规定风险值rpi的最大值。在风险值rpi的最大值被设为“1”的情况下,增益ci_var被设定在“0”至“1”的范围内。增益ci_var是使用例如本车辆1与风险对象物之间的最短距离的倒数、和风险对象物相对于本车辆1的相对速度中的任意一方或两方而计算出的。最短距离越短,另外,相对速度越大,则增益ci_var成为越大的值。
[0085]
坡度系数σi是规定潜在风险相对于距风险对象物的基准位置的距离的减小率的系数。坡度系数σi可以根据风险对象物的种类而调节。此外,在风险对象物为车辆等移动体的情况下,由于该移动体的行进方向上的风险变高,所以可以将移动体的前方的风险值rpi的设定范围设定得比后方的风险值rpi的设定范围宽。在该情况下,前方的风险值rpi的进深可以根据该移动体的车速或者相对于本车辆1的相对车速而可变。
[0086]
表示路面状态的系数r是为了扩大位于本车辆1的行驶轨迹的偏离方向上的风险对象物的潜在风险的设定范围而使用的系数,并作为路面摩擦系数μ的倒数而根据路面摩擦状态来设定。路面摩擦系数μ根据由路面摩擦状态判定部63判定的路面摩擦状态而被设定在“0”~“1”的范围内。路面摩擦系数μ越小,即路面越容易打滑,则表示路面状态的系数r成为越大的值,潜在风险的设定范围被扩大。除了位于本车辆1的行驶轨迹的偏离方向上的风险对象物以外的风险对象物的潜在风险的表示路面状态的系数r被设为“1”,位于本车辆1的行驶轨迹的偏离方向上的风险对象物的潜在风险的表示路面状态的系数r根据路面摩擦系数μ而可变。
[0087]
在使用潜在风险来设定本车辆1的驾驶条件的情况下,通过针对在本车辆1的行驶过程中检测到的各个风险对象物设定潜在风险,并将各个潜在风险的空间上的重叠相加,从而求出表示针对多个风险对象物的风险的风险图(潜力场)。此时,也可以代替根据针对
每个风险对象物设定的潜在风险而计算出的各个坐标位置处的风险值的和,而将某一个最大的风险值设为该坐标位置处的风险值。
[0088]
在风险图中,风险的高低在二维平面上表示为等高线。如上所述,由于风险值具有二维分布,所以能够选择风险变低的轨道。也可以将未明显化的风险(潜在风险)与明显化的风险对象物一并考虑来运算风险图。例如,在通过转弯目的地由于遮挡物而成为死角的区域的情况下,可以设想行人和/或车辆从该死角区域突然出现而赋予潜在风险,并将其反映到风险图。
[0089]
在本实施方式的驾驶辅助装置50中,使用上述式(1)对各个风险对象物设定潜在风险。对于位于基于可能成为本车辆1的行驶轨迹偏离的原因的路面摩擦状态的信息而设想的偏离方向上的风险对象物,路面摩擦状态被反映于潜在风险,潜在风险的设定范围被扩大。由此,能够容易将要设定的目标轨道设定于与该风险对象物分离的位置,从而设定考虑了行驶轨迹的偏离的最佳的驾驶条件。
[0090]
(1-3-2.潜在风险的具体例)
[0091]
接下来,对由本实施方式的驾驶辅助装置50设定的潜在风险的具体例进行说明。
[0092]
图4~图6示出在通过在本车辆1的行进方向前方的道路一端停车的其他车辆(停车车辆)91的旁边的场景下设定的潜在风险和目标轨道的设定例。
[0093]
图4示出路面状态为理想的干燥状态的情况下的例子。理想的干燥状态是指例如沥青的干燥状态的路面。在不存在风险对象物的情况下,目标轨道基本上设定在例如设定于车道的中央的基准路径tv上(图4的虚线)。如果在本车辆1的行进方向前方检测到停车车辆91,则风险图生成部65使用上述式(1)将潜在风险rp_ve设定于停车车辆91。此时,由于在本车辆1与停车车辆91之间不存在路面摩擦系数μ小的区域,因此,将上述式(1)的表示路面状态的系数r设为1来设定潜在风险rp_ve。驾驶条件设定部67为了避免与停车车辆91的碰撞而以使本车辆1通过风险值成为最低的位置p1的方式设定目标轨道t1。例如,驾驶条件设定部67以转向角速度不超过预先设定的阈值的方式设定通过上述位置p1的目标轨道t1。
[0094]
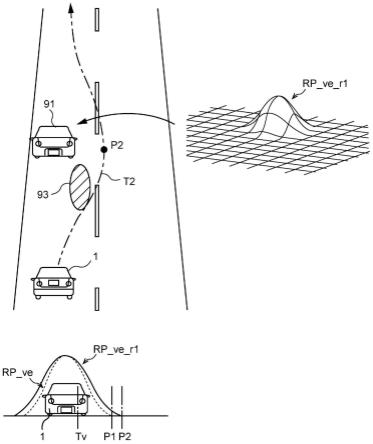
图5~图6示出在本车辆1与停车车辆91之间的路面的一部分存在冻结部分(以下,也称为“结冰区域”)93的情况下的例子。例如在存在于路面上的积水冻结的情况下,可能产生“结冰区域”93。风险图生成部65在本车辆1的行进方向前方的路面的一部分的路面状态被判别为“结冰”的情况下,预测由该“结冰区域”93引起的行驶轨迹偏离的方向。在本车辆1在上述的图4所示的目标轨道t1上行驶的情况下,如图5所示,预测本车辆1的车轮在即将通过停车车辆91的旁边之前通过“结冰区域”93之上,由于车轮打滑而使本车辆1朝向停车车辆91的方向。
[0095]
风险图生成部65在设定存在于行驶轨迹的偏离方向上的停车车辆91的潜在风险rp_ve时,根据路面摩擦系数μ设定上述式(1)的表示路面状态的系数r,并设定潜在风险rp_ve_r1。由此,如图6所示,潜在风险rp_ve_r1的设定范围与潜在风险rp_ve的设定范围相比被扩大。其结果为,以通过比图4所示的位置p1更远离停车车辆91的位置p2的方式设定目标轨道t2。
[0096]
在上述式(1)中,规定潜在风险相对于距风险对象物的基准位置的坐标x0,y0的距离的减小率的坡度被设定为依赖于表示路面状态的系数(路面摩擦系数μ的倒数)r的平方。因此,路面摩擦系数μ越小,坡度越平缓,潜在风险rpi的设定范围被扩大。具体而言,如图7
所示,反映路面状态而设定于停车车辆91的潜在风险rp_ve_r1的设定范围以路面状态为“干燥”、“潮湿”、“积雪”、“结冰”的顺序变大。因此,能够以路面越容易打滑,则在离停车车辆91越远的位置通过的方式设定目标轨道,并降低与停车车辆91的碰撞风险。
[0097]
《1-4.驾驶辅助装置的动作》
[0098]
接下来,对本实施方式的驾驶辅助装置50的动作例具体地进行说明。
[0099]
图8~图9是示出驾驶辅助装置50的处理动作的一例的流程图。
[0100]
首先,如果包含驾驶辅助装置50的车载系统被启动(步骤s11),则获取部61获取本车辆1的行驶状态的信息(步骤s13)。具体地,获取部61基于从车辆状态传感器35发送的检测信号,获取方向盘或转向轮的转向角、加速器开度、制动器操作量或发动机转速等车辆1的操作状态、以及车速、纵向加速度、横向加速度、横摆角速度等车辆的行为的信息。
[0101]
接下来,获取部61获取本车辆1的周围环境的信息(步骤s15)。具体地,获取部61基于从周围环境传感器31发送的检测信号,获取存在于本车辆1的周围的风险对象物的种类、尺寸(宽度、高度以及进深)、位置、从本车辆1到风险对象物为止的距离、以及本车辆1与风险对象物的相对速度的信息。此外,获取部61也可以基于从周围环境传感器31发送的检测信号,获取道路上的边界线的信息。应予说明,获取部61也可以经由车车间通信、路车间通信、或者移动体通信而从外部的设备获取上述的周围环境的信息中的任意一个或多个信息。
[0102]
此外,获取部61基于从周围环境传感器31和路面检测传感器33发送的检测信号,获取与本车辆1的行进方向上的路面的摩擦状态相关的信息。具体地,获取部61基于从前方拍摄相机31lf、31rf发送的检测信号,获取本车辆1的行进方向上的路面的颜色的信息。此外,获取部61基于从路面检测传感器33所包含的非接触温度传感器发送的检测信号,获取外部气温或者路面温度的信息。此外,获取部61基于路面检测传感器33所包含的近红外线传感器的检测信号,获取路面的水分百分比的信息。更具体而言,在向路面照射近红外线时,如果在路面水分多,则近红外线的反射量变少,另一方面,如果在路面水分少,则近红外线的反射量变多。因此,获取部61能够基于近红外线传感器的检测信号来获取路面的水分百分比。此外,获取部61基于路面检测传感器33所包含的激光传感器的检测信号,获取路面的粗糙度的信息。更具体而言,获取部61基于从照射激光起到检测到其反射光为止的时间,获取本车辆1的前方的路面的粗糙度的信息。基于从前方拍摄相机31lf、31rf以及路面检测传感器33发送的检测信号而获取的与路面的摩擦状态相关的信息分别与由从本车辆1观察到的方向以及距离等规定的相对位置的信息相关联。
[0103]
接下来,路面摩擦状态判定部63基于由获取部61获取的与路面的摩擦状态相关的信息,判定本车辆1的行进方向上的路面摩擦状态(步骤s17)。例如,路面摩擦状态判定部63基于与路面的摩擦状态相关的信息,将路面状态判别为“干燥”、“潮湿”、“积雪”或“结冰”中的任意一种。例如,路面摩擦状态判定部63可以使用将对路面温度或外部气温、路面的粗糙度以及路面水分百分比分别进行归一化而得的值作为参数的公知的三维图来判别路面状态。
[0104]
此外,路面摩擦状态判定部63在将路面状态判定为“干燥”的情况下,将从前方拍摄相机31lf、31rf发送的图像数据与预先记录的“沥青”、“混凝土”以及“砂砾”的图像数据进行比较,从而求出与各个数据的相似度,并判别路面的材质。比较对象的“沥青”的图像数
据可以细分为“新铺装”、“普通铺装”、“铺装磨损”以及“焦油过剩”的图像数据。比较对象的“混凝土”的图像数据可以细分为“新铺装”、“普通铺装”以及“铺装磨损”的图像数据。比较对象的“砂砾”的图像数据可以细分为“简易铺装”以及“细砂砾”的图像数据。路面摩擦状态判定部63在将路面状态判定为“积雪”或“结冰”的情况下,也可以基于获取的图像数据进行匹配处理,进而进行细分化的路面状态的判定。路面状态的判别也可以使用进行了机器学习的学习模型来进行。
[0105]
路面摩擦状态判定部63将判别出的路面状态反映到预先设定了路面状态与路面摩擦系数μ之间的关系的数据库中,并计算出路面摩擦系数μ。例如,路面摩擦系数μ的数据库可以是根据细分化的路面状态的项目而预先设定了路面摩擦系数μ的数据库。
[0106]
如上所述,与路面的摩擦状态相关的信息分别与相对于本车辆1的相对位置的信息相关联,路面摩擦状态判定部63将本车辆1的行进方向的前方的路面划分为与路面状态或路面摩擦系数μ对应的区域。例如,路面摩擦状态判定部63如“干燥区域”、“潮湿区域”、“积雪区域”以及“结冰区域”那样针对每个路面状态或路面摩擦系数μ进行区域设定。也可以进行更细分化的区域设定。
[0107]
接下来,风险图生成部65基于由获取部61获取的周围环境的信息生成基本风险图(步骤s19)。具体地,风险图生成部65通过针对检测到的风险对象物分别使用上述式(1)设定潜在风险,并将各个潜在风险的空间上的重叠相加,从而生成表示针对多个风险对象物的风险的基本风险图(潜力场)(参照图4)。在步骤s19中,不论路面状态如何,都将表示路面状态的系数r设为“1”来设定潜在风险,并生成基本风险图。
[0108]
接下来,驾驶条件设定部67基于所生成的基本风险图和本车辆1的行驶状态的信息来设定本车辆1的驾驶条件(步骤s21)。具体地,驾驶条件设定部67基于例如设定于车道的中央的基准路径的信息以及生成的基本风险图,以使本车辆1通过风险值成为最低的位置的方式设定目标轨道和目标车速。此时,驾驶条件设定部67也可以基于本车辆1的当前的行进方向、转向角、车速以及加减速度的信息,以转向角速度不超过预先设定的阈值的方式设定目标轨道。
[0109]
接下来,驾驶条件设定部67基于由路面摩擦状态判定部63计算出的路面状态和路面摩擦系数μ的信息,预测本车辆1沿着目标轨道行驶的情况下的由打滑所引起的行进方向的偏离(步骤s23)。例如,驾驶条件设定部67判定在本车辆1沿着设定的目标轨道行驶的情况下是否通过“潮湿区域”、“积雪区域”或“结冰区域”,并预测本车辆1的行进方向的偏离(参照图5)。例如,驾驶条件设定部67判定本车辆1的车轮中的哪个车轮在“潮湿区域”、“积雪区域”或“结冰区域”上通过,并基于车轮在“潮湿区域”、“积雪区域”或“结冰区域”上通过时的转向角、车速以及加减速度的信息,预测本车辆1的打滑的可能性以及由该打滑所引起的行进方向的偏离。此时,可以使用“潮湿区域”、“积雪区域”或“结冰区域”各自的路面摩擦系数μ来预测打滑。此外,在本车辆1设置有推定轮胎的磨损状态的功能的情况下,也可以使用该磨损状态来预测打滑。
[0110]
接下来,驾驶条件设定部67判定在本车辆1的行进方向偏离的方向上是否存在风险对象物(步骤s25)。例如,驾驶条件设定部67判定在本车辆1在预测出的行进方向偏离的方向上移动的情况下,是否存在在本车辆1的移动方向上重叠的风险对象物。
[0111]
在本车辆1的行进方向偏离的方向上不存在风险对象物的情况下(s25/否),驾驶
条件设定部67直接进入步骤s31,基于在步骤s21中设定的目标轨道和目标车速的信息来设定目标转向角和目标加减速度,并向车辆控制装置41发送这些信息(步骤s31)。
[0112]
另一方面,在本车辆1的行进方向偏离的方向上存在风险对象物的情况下(s25/是),风险图生成部65进行将存在于行进方向偏离的方向上的风险对象物的潜在风险的设定范围扩大的校正(步骤s27)。具体地,风险图生成部65基于成为本车辆1的行进方向偏离的主要原因的“潮湿区域”、“积雪区域”或“结冰区域”的路面摩擦系数μ,设定相符的风险对象物的潜在风险的表示路面状态的系数r。风险图生成部65使用所设定的表示路面状态的系数r,利用上述式(1)设定该风险对象物的潜在风险。由此,至少潜在风险的设定区域被扩大(参照图6)。
[0113]
接下来,驾驶条件设定部67基于反映了校正后的潜在风险的风险图和本车辆1的行驶状态的信息来设定本车辆1的驾驶条件(步骤s29)。具体地,驾驶条件设定部67依照步骤s21的处理,以使本车辆1通过风险值成为最低的位置的方式设定目标轨道和目标车速。所设定的目标轨道与在步骤s21中设定的目标轨道相比,被设定为通过更远离风险对象物的位置。
[0114]
接下来,驾驶条件设定部67基于所设定的目标轨道和目标车速的信息来设定目标转向角和目标加减速度,并向车辆控制装置41发送这些信息(步骤s31)。
[0115]
接下来,驾驶条件设定部67判定车载系统是否已停止(步骤s33)。在车载系统已停止的情况下(s33/是),结束由控制部51进行的处理。另一方面,在车载系统未停止的情况下(s33/否),返回步骤s13,反复执行到此为止所说明的各步骤的处理。
[0116]
如以上说明的那样,本公开的第一实施方式的驾驶辅助装置50在本车辆1的行进方向的前方存在路面摩擦系数μ小的低摩擦区域的情况下,预测由该低摩擦区域引起的本车辆1的行进方向的偏离。此外,驾驶辅助装置50在本车辆1的行进方向偏离的方向上存在风险对象物的情况下,扩大该风险对象物的潜在风险的设定范围。由此,与基于扩大前的潜在风险而设定的目标轨道(t1)相比,以通过更远离风险对象物的位置的方式设定目标轨道(t2)。因此,即使在假设本车辆1因低摩擦区域而打滑的情况下,也能够降低对风险对象物的碰撞风险。
[0117]
此外,本实施方式的驾驶辅助装置50使用将路面摩擦系数μ反映于潜在风险的坡度的上述式(1),设定风险对象物的潜在风险。因此,能够根据低摩擦区域的路面状态扩大潜在风险的设定范围,并防止校正前后的目标轨道之差过度地变大。
[0118]
《2.第二实施方式》
[0119]
接下来,对本公开的第二实施方式的驾驶辅助装置进行说明。
[0120]
在第二实施方式的驾驶辅助装置中,将根据行进方向上的路面的状态来校正风险图与扩大存在于本车辆1的行进方向偏离的方向上的风险对象物的潜在风险的设定范围一起进行。具体地,在本车辆1的行进方向上的路面的一部分区域的路面摩擦系数为比周围的路面摩擦系数低的状态的情况下,对该一部分区域的路面也设定潜在风险。此外,在本车辆1的行进方向上的整体的路面摩擦系数为比干燥路面的路面摩擦系数小的状态的情况下,增大存在于行进方向偏离的方向上的风险对象物的潜在风险的值。
[0121]
本实施方式的驾驶辅助装置能够设为与图2所示的第一实施方式的驾驶辅助装置50的构成例相同的构成。以下,对于本实施方式的驾驶辅助装置50的具体处理,主要对与第
一实施方式的不同之处进行说明。
[0122]
《2-1.潜在风险的具体例》
[0123]
图10~图11示出由本实施方式的驾驶辅助装置50生成的潜在风险和目标轨道的设定例。图10~图11所示的潜在风险和目标轨道的设定例与图4所示的场景中的设定例对应。
[0124]
图10与图6所示的例子同样地示出在本车辆1与停车车辆91之间的路面的一部分存在“结冰区域”93的情况下的例子。在该情况下,如图5所示,预测本车辆1的车轮在即将通过停车车辆91的旁边之前通过“结冰区域”93之上,由于车轮打滑而使本车辆1朝向停车车辆91的方向。因此,如图6所示,风险图生成部65进行将存在于行驶轨迹偏离的方向上的停车车辆91的潜在风险rp_ve的设定范围扩大的校正,并设定校正后的潜在风险rp_ve_r1。
[0125]
此外,在本实施方式中,风险图生成部65在路面的一部分被判别为“潮湿区域”、“积雪区域”或“结冰区域”(以下,有时统称为“低摩擦区域”)的情况下,对该“低摩擦区域”也设定潜在风险rp_rd。相对于针对风险对象物设定的上述式(1)的潜在风险rpi,针对低摩擦区域设定的潜在风险rp_rd由例如下述式(2)表示。
[0126]
【数学式2】
[0127][0128]
rp_rd:低摩擦区域的风险值
[0129]
v0:表示本车辆1的车速的系数
[0130]
r:表示路面状态的系数
[0131]
x
0r
,y
0r
:低摩擦区域的坐标
[0132]
表示本车辆1的车速的系数v0参照预先设定的基准将本车辆1的车速标准化而将其规定在“0”~“1”的范围内。车速越快,则表示本车辆1的车速的系数v0成为越大的值。低摩擦区域的坐标x
0r
,y
0r
可以是例如低摩擦区域中的路面摩擦系数μ示出最小值的位置的坐标。或者,低摩擦区域的坐标x
0r
,y
0r
也可以是在俯瞰低摩擦区域的情况下的重心的位置。
[0133]
风险图生成部65使用上述式(2),对路面摩擦系数μ比周围的路面摩擦系数小的区域的路面也设定潜在风险rp_rd。由此,如图10所示,以避开“结冰区域”93的方式设定目标轨道t3,并以通过比图6所示的位置p2更远离停车车辆91的位置p3的方式设定目标轨道t3。此外,能够使本车辆1的车轮通过“结冰区域”93上的可能性降低,并进一步降低因打滑所引起的与停车车辆91碰撞的隐患。
[0134]
在上述式(2)中,规定潜在风险相对于距低摩擦区域的坐标x0,y0的距离的减小率的坡度被设定为依赖于表示路面状态的系数(路面摩擦系数μ的倒数)r的平方。因此,路面摩擦系数μ越小,坡度越平缓,潜在风险rpi的设定范围被扩大。因此,能够以低摩擦区域越容易打滑,则在离低摩擦区域的坐标x0,y0越远的位置通过的方式设定目标轨道,并降低由车轮通过低摩擦区域引起的打滑的风险。
[0135]
图11示出在本车辆1的行进方向的前方的整个路面形成有“结冰区域”的情况下的例子。在该情况下,本车辆1在哪个轨道行驶,都有可能因车轮打滑而与停车车辆91碰撞。因此,在本实施方式中,风险图生成部65在本车辆1的前方的整体的路面摩擦系数μ为比干燥
路面的路面摩擦系数μ小的状态的情况下,增大位于所设想的偏离的方向上的风险对象物的潜在风险的值。在本车辆1的行进方向的前方的整个路面的路面摩擦系数μ小的情况下设定于风险对象物的潜在风险rpi由例如下述式(3)表示。
[0136]
【数学式3】
[0137][0138]
rpi:风险值
[0139]ci
_var:增益
[0140]
σi:坡度系数
[0141]
r:表示路面状态的系数
[0142]
x0,y0:风险对象物的基准位置的坐标
[0143]
i:用于区分风险对象物的编号
[0144]
与上述式(1)相比,在上述式(3)中,对规定风险值rpi的最大值的增益ci_var乘以表示路面状态的系数r。路面摩擦系数μ越小,即路面越容易打滑,则表示路面状态的系数r成为越大的值。因此,路面摩擦系数μ越小,风险值rpi的最大值越大。此外,在上述式(3)中,设定为对坡度系数σi乘以表示路面状态的系数r的三次方,该坡度系数σi规定潜在风险相对于距风险对象物的基准位置的距离的减小率。因此,路面摩擦系数μ越小,坡度越平缓,潜在风险rpi的设定范围进一步被扩大。
[0145]
因此,如图11所示,所设定的潜在风险rpi_ve_r2与图4所示的基本潜在风险rpi相比,整体上变大。由此,以通过比图10所示的位置p3更远离停车车辆91的位置p4的方式设定目标轨道t4。此外,以路面越容易打滑,则在离停车车辆91越远的位置通过的方式设定目标轨道。如此,在整个路面的路面摩擦系数μ小的情况下,能够进一步降低与停车车辆91的碰撞风险。
[0146]
《2-2.驾驶辅助装置的动作》
[0147]
接下来,对本实施方式的驾驶辅助装置50的动作例具体地进行说明。
[0148]
图12是示出驾驶辅助装置50的处理动作的一例的流程图。图12所示的流程图是与示出第一实施方式的驾驶辅助装置50的动作例的图9进行替换的流程图,本实施方式的驾驶辅助装置50的处理动作由图8和图12示出。更具体而言,在本实施方式中,代替图9的流程图所示的步骤s27的处理而执行图12的流程图所示的步骤s41~步骤s47的处理。
[0149]
驾驶辅助装置50按照在第一实施方式中说明的顺序,执行图8所示的步骤s11到步骤s23为止的处理。接下来,驾驶条件设定部67判定在本车辆1的行进方向偏离的方向上是否存在风险对象物(步骤s25)。在本车辆1的行进方向偏离的方向上不存在风险对象物的情况下(s25/否),驾驶条件设定部67直接进入步骤s31,基于在步骤s21中设定的目标轨道和目标车速的信息来设定目标转向角和目标加减速度,并向车辆控制装置41发送这些信息(步骤s31)。
[0150]
另一方面,在本车辆1的行进方向偏离的方向上存在风险对象物的情况下(s25/是),风险图生成部65基于步骤s17的判定结果,判定是否本车辆1的行进方向上的整个路面为低摩擦区域(步骤s41)。例如,风险图生成部65可以判定是否本车辆1行驶道路的前方的
距本车辆1的距离为预定的范围内的整个路面为低摩擦区域。风险图生成部65也可以判定是否预定的范围内的路面中的预定比例(例如80%)以上为低摩擦区域。
[0151]
在不是本车辆1的行进方向上的整个路面为低摩擦区域的情况下(s41/否),风险图生成部65与在第一实施方式中说明的步骤s27的处理同样地,进行将存在于行进方向偏离的方向上的风险对象物的潜在风险的设定范围扩大的校正(步骤s43)。具体地,风险图生成部65使用低摩擦区域的表示路面状态的系数r,利用上述式(1)设定该风险对象物的潜在风险。
[0152]
接下来,风险图生成部65对低摩擦区域设定潜在风险(步骤s45)。具体地,风险图生成部65使用低摩擦区域的表示路面状态的系数r,利用上述式(2)设定该低摩擦区域的潜在风险。
[0153]
另一方面,在本车辆1的行进方向上的整个路面为低摩擦区域的情况下(s41/是),风险图生成部65进行将存在于行进方向偏离的方向上的风险对象物的潜在风险的风险值增大并且扩大该潜在风险的设定范围的校正(步骤s47)。具体而言,使用低摩擦区域的表示路面状态的系数r,利用上述式(3)设定该风险对象物的潜在风险。
[0154]
接下来,驾驶条件设定部67基于反映了校正后的潜在风险的风险图和本车辆1的行驶状态的信息来设定本车辆1的驾驶条件(步骤s29)。接下来,驾驶条件设定部67基于所设定的目标轨道和目标车速的信息来设定目标转向角和目标加减速度,并向车辆控制装置41发送这些信息(步骤s31)。
[0155]
接下来,驾驶条件设定部67判定车载系统是否已停止(步骤s33)。在车载系统已停止的情况下(s33/是),结束由控制部51进行的处理。另一方面,在车载系统未停止的情况下(s33/否),返回步骤s13,反复执行到此为止所说明的各步骤的处理。
[0156]
如以上说明的那样,本公开的第二实施方式的驾驶辅助装置50与第一实施方式的驾驶辅助装置50同样地,在本车辆1的行进方向偏离的方向上存在风险对象物的情况下,扩大该风险对象物的潜在风险的设定范围。此外,本实施方式的驾驶辅助装置50在本车辆1的行进方向前方的路面的一部分形成有低摩擦区域的情况下,对该低摩擦区域设定潜在风险。由此,与基于扩大前的潜在风险而设定的目标轨道(t1)相比,以通过进一步远离风险对象物的位置的方式设定目标轨道(t3)。此外,能够降低本车辆1的车轮通过低摩擦区域的隐患,并降低本车辆1打滑的可能性。因此,能够降低对风险对象物的碰撞风险。
[0157]
此外,本实施方式的驾驶辅助装置50在本车辆1的行进方向前方的整个路面成为低摩擦区域的情况下,增大风险对象物的潜在风险,并且扩大潜在风险的设定范围。由此,以通过进一步远离风险对象物的位置的方式设定目标轨道(t4)。因此,能够降低对风险对象物的碰撞风险。
[0158]
此外,本实施方式的驾驶辅助装置50使用将路面摩擦系数μ反映于潜在风险的坡度的上述式(2),设定低摩擦区域的潜在风险。因此,能够根据低摩擦区域的路面状态扩大潜在风险的设定范围,并防止校正前后的目标轨道之差过度地变大。
[0159]
此外,本实施方式的驾驶辅助装置50使用将路面摩擦系数μ反映于潜在风险的最大值和坡度的上述式(3),设定风险对象物的潜在风险。因此,能够根据低摩擦区域的路面状态增大潜在风险,并且扩大设定范围,防止校正前后的目标轨道之差过度地变大。
[0160]
《3.第三实施方式》
[0161]
接下来,对本公开的第三实施方式的驾驶辅助装置进行说明。
[0162]
第三实施方式的驾驶辅助装置被构成为,在第一实施方式或第二实施方式的驾驶辅助装置50,还基于本车辆1的驾驶员对风险对象物的敏感度来校正各个风险对象物的潜在风险,并将其反映到风险图。以下,关于本实施方式的驾驶辅助装置,主要对与第一实施方式和第二实施方式的不同之处进行说明。
[0163]
《3-1.构成例》
[0164]
图13是示出本实施方式的驾驶辅助装置70的构成例的框图。
[0165]
驾驶辅助装置70具备控制部51和存储部53。在驾驶辅助装置70经由专用线或者can和/或lin等通信手段连接有周围环境传感器31、路面检测传感器33以及车辆状态传感器35。此外,在驾驶辅助装置70经由专用线或者can和/或lin等通信手段连接有导航系统40、车辆控制装置41以及hmi43。进一步地,在本实施方式的驾驶辅助装置70经由专用线或者can和/或lin等通信手段连接有车内拍摄相机39、驾驶员数据库71以及驾驶特性数据库73。
[0166]
车内拍摄相机39被配置为能够拍摄车辆1的驾驶员,并用于识别驾驶员。车内拍摄相机39具备ccd或cmos等拍摄元件,并对车内进行拍摄,生成图像数据。车内拍摄相机39向驾驶辅助装置70发送所生成的图像数据。所设置的车内拍摄相机39可以仅有一个,也可以为多个。但是,识别驾驶员的手段并不限定于车内拍摄相机39,例如也可以被构成为驾驶员能够将识别信息登记于驾驶辅助装置70。
[0167]
《3-2.数据库》
[0168]
驾驶辅助装置70以能够与驾驶员数据库71和驾驶特性数据库73通信的方式进行连接。驾驶员数据库71和驾驶特性数据库73分别由ram等存储元件、或者hdd(hard disk drive:硬盘驱动器)、cd(compact disk:光盘)、dvd(digital versatile disk:数字通用光盘)、ssd(solid state drive:固态驱动器)、usb闪存、存储装置等能够更新的记录介质构成。但是,记录介质的种类没有特别限定。驾驶员数据库71和驾驶特性数据库73中的一个或全部可以分别搭载于车辆1,也可以存储在能够经由移动体通信等无线通信手段与驾驶辅助装置70进行通信的服务器。此外,各数据库也可以被构成为一个数据库。
[0169]
(驾驶员数据库)
[0170]
驾驶员数据库71是记录用于识别车辆1的驾驶员的识别信息的数据库。识别信息可以是例如识别编号或识别符号。但是,识别信息不限于上述的例子。
[0171]
(驾驶特性数据库)
[0172]
驾驶特性数据库73是记录各个驾驶员对各个风险对象物的敏感度的信息的数据库。对风险对象物的敏感度是例如针对每个风险对象物以多个等级进行设定的。各个敏感度信息是表示在本车辆1的行驶过程中针对各个风险对象物各个驾驶员感到不安或恐惧的距离的信息,并反映于对针对各个风险对象物预先设定的基本潜在风险rpi进行校正的系数。
[0173]
各个驾驶员对风险对象物的敏感度例如可以是基于预先获取的问卷调查的回答结果的信息而设定的信息。具体而言,能够设为让各个驾驶员回答在对哪个风险对象物接近到何种程度的距离时会感到不安或恐惧,并以多个等级评价距风险对象物的距离的数据。但是,对各个风险对象物的敏感度的信息的收集方法和设定方法并不限于上述的例子,
可以通过适当的方法来设定。敏感度的信息以与驾驶员的识别信息相关联的方式被记录。
[0174]
应予说明,各个驾驶员对风险对象物的敏感度的信息也可以是对在本车辆1的手动驾驶时驾驶员对风险对象物感到的风险进行学习而得的数据。
[0175]
《3-3.功能构成》
[0176]
如图13所示,驾驶辅助装置70的控制部51具备驾驶员判定部69,并且还具备第一实施方式中说明的获取部61、路面摩擦状态判定部63、风险图生成部65以及驾驶条件设定部67。这些各部是通过由cpu等处理器执行计算机程序而实现的功能,但各部中的一部分或全部也可以使用模拟电路构成。
[0177]
驾驶员判定部69执行基于从车内拍摄相机39发送的图像数据来确定本车辆1的驾驶员的处理。应予说明,驾驶员判定部69也可以基于驾驶员或乘员介由触摸面板等输入设备而登记的信息来确定本车辆1的驾驶员。
[0178]
获取部61、路面摩擦状态判定部63、风险图生成部65以及驾驶条件设定部67的基本功能可以与第一实施方式和第二实施方式的驾驶辅助装置50的各部相同。但是,在本实施方式中,风险图生成部65还使用各个驾驶员对风险对象物的敏感度的信息来生成风险图。
[0179]
风险图生成部65在由第一实施方式或第二实施方式的驾驶辅助装置50执行的处理动作中进行潜在风险的设定时,反映驾驶员对风险对象物的敏感度的信息。具体地,风险图生成部65被构成为驾驶员对风险对象物的敏感度越高,则越扩大潜在风险的设定范围。
[0180]
例如,在表示设定于风险对象物的潜在风险rpi的上述式(1)和式(3)的基础上,设定为对坡度系数σi乘以对各个风险对象物的敏感度的系数s,该坡度系数σi规定潜在风险相对于距风险对象物的基准位置的坐标x0,y0的距离的减小率。即,在本实施方式中,代替上述式(1)和式(3)而使用下述式(4)和式(5)来设定风险对象物的潜在风险rpi。
[0181]
【数学式4】
[0182][0183]
rpi:风险值
[0184]ci
_var:增益
[0185]
σi:坡度系数
[0186]
r:表示路面状态的系数
[0187]
x0,y0:风险对象物的基准位置的坐标
[0188]
s:表示对风险对象物的敏感度的系数
[0189]
i:用于区分风险对象物的编号
[0190]
【数学式5】
[0191][0192]
rpi:风险值
[0193]ci
_var:增益
[0194]
σi:坡度系数
[0195]
r:表示路面状态的系数
[0196]
x0,y0:风险对象物的基准位置的坐标
[0197]
s:表示对风险对象物的敏感度的系数
[0198]
i:用于区分风险对象物的编号
[0199]
表示对风险对象物的敏感度的系数s能够设为将各个驾驶员对风险对象物感到不安或恐惧的距离评价为例如“1”~“4”的多个等级的值。感到不安或恐惧的距离越大,则系数s的值成为越大的值。即,对风险对象物感到不安或恐惧的距离越远,则表示对风险对象物的敏感度的系数s成为越大的值。因此,如图14所示,对风险对象物的敏感度越高,则潜在风险的设定范围越被扩大。
[0200]
应予说明,表示对风险对象物的敏感度的系数s不仅可以根据从本车辆1到风险对象物为止的距离来设定,还可以根据本车辆1的速度或风险对象物相对于本车辆1的相对速度来设定。
[0201]
《3-4.驾驶辅助装置的动作》
[0202]
接下来,对本实施方式的驾驶辅助装置70的动作例具体地进行说明。
[0203]
图15是示出驾驶辅助装置70的处理动作的一例的流程图。图15所示的流程图是与示出第一实施方式的驾驶辅助装置50的动作例的图8进行替换的流程图,本实施方式的驾驶辅助装置70的处理动作由图15和图9、或者图15和图12示出。更具体而言,在本实施方式中,对图8所示的流程图追加图15所示的步骤s51和步骤s53的处理。此外,在本实施方式中,在图15所示的步骤s19、图9所示的步骤s27以及图12所示的步骤s43中针对风险对象物设定潜在风险时,使用上述式(4)来代替使用上述式(1)。此外,在本实施方式中,在图12所示的步骤s47中针对风险对象物设定潜在风险时,使用上述式(5)来代替使用上述式(3)。
[0204]
具体地,如果车载系统启动(步骤s11),则控制部51的驾驶员判定部69执行识别本车辆1的驾驶员的处理(步骤s51)。例如,驾驶员判定部69使用从车内拍摄相机39发送的图像数据来执行面部识别处理,检测出坐在驾驶席的本车辆1的驾驶员。此外,驾驶员判定部69提取驾驶员的面部的特征量,并对照存储于驾驶员数据库71的特征量的数据来确定相符的驾驶员。驾驶员判定部69将确定的驾驶员的识别信息记录于存储部53。在驾驶员数据库71中未记录有相符的驾驶员的数据的情况下,驾驶员判定部69将不存在该驾驶员的识别信息的情况记录于存储部53。
[0205]
此外,在执行了本车辆1的行驶状态的信息的获取处理(步骤s13)、周围环境的信息的获取处理(步骤s15)以及路面摩擦状态的判定处理(步骤s17)之后,风险图生成部65判定驾驶员对检测到的风险对象物的敏感度(步骤s53)。具体地,风险图生成部65参照驾驶特性数据库73,读取与所确定的驾驶员的识别信息对应的对风险对象物的敏感度的信息。此外,风险图生成部65基于与检测到的风险对象物的种类对应的敏感度的信息,设定表示对风险对象物的敏感度的系数s。
[0206]
以后,控制部51执行步骤s19~步骤s23的处理,还按照图9或图12的流程图执行各步骤的处理。由此,在步骤s19、步骤s27、步骤s43以及步骤s47中分别针对风险对象物设定的潜在风险反映驾驶员对风险对象物的敏感度,并且越是容易感到不安和/或恐惧的风险对象物,所设定的潜在风险的设定范围越被扩大。因此,不仅能够降低由本车辆1的打滑所
引起的与风险对象物的碰撞风险,还能够设定能够抑制驾驶员对风险对象物的不安和/或恐惧的目标轨道。
[0207]
《4.第四实施方式》
[0208]
接下来,对本公开的第四实施方式的驾驶辅助装置进行说明。
[0209]
在第一实施方式至第三实施方式的驾驶辅助装置中,作为可能成为本车辆的行驶轨迹偏离的原因的外部环境因素的信息而使用路面摩擦状态的信息,但在第四实施方式的驾驶辅助装置中,作为外部环境因素的信息而使用风向的信息。
[0210]
在本车辆1的周围产生的风的风速快的情况下,本车辆1的行驶轨迹有可能向下风的方向偏离。因此,在本实施方式中,在预测为本车辆1的行驶轨迹受到风的影响而偏离的情况下,将位于该偏离的方向上的风险对象物的潜在风险的设定范围扩大。以下,作为本实施方式的驾驶辅助装置,对在第一实施方式中所示的驾驶辅助装置中代替路面摩擦状态的信息而使用风向的信息的例子进行说明。
[0211]
图16是示出本实施方式的驾驶辅助装置80的构成例的框图。
[0212]
在驾驶辅助装置80,代替路面检测传感器而连接有风速传感器81。应予说明,在将路面摩擦状态的信息与风向的信息一并反映于潜在风险的情况下,也可以在驾驶辅助装置80连接有路面检测传感器33,并在控制部51具备路面摩擦状态判定部63。
[0213]
风速传感器81检测本车辆1的行驶区域的风速和风向,并向驾驶辅助装置80发送检测到的风速和风向的信息。控制部51的获取部61也可以经由移动体通信手段从远程信息处理服务等获取气象信息,并且与由风速传感器81检测到的风速和风向的信息一并获取。
[0214]
风险图生成部65执行基于存在于本车辆1的周围的风险对象物的基本潜在风险的信息以及由获取部61获取的风速和风向的信息来生成风险图的处理。具体地,风险图生成部65被构成为在判断为本车辆1的行驶轨迹受到风的影响的情况下,风速越大,则越扩大潜在风险的设定范围。
[0215]
例如,风险图生成部65在本车辆1在不考虑风的影响的情况下设定的本车辆1的目标轨道上行驶的期间判定为在从本车辆1朝向风险对象物的方向上刮的风的风速为预先设定的风速阈值以上的情况下,根据风速扩大潜在风险的设定范围。风速阈值可以是恒定的值,也可以是根据本车辆1的重量和/或路面摩擦状态而设定的值。
[0216]
例如,在表示设定于风险对象物的潜在风险rpi的上述式(1)的基础上,设定为对坡度系数σi乘以表示风的影响的系数w,该坡度系数σi规定潜在风险相对于距风险对象物的基准位置的坐标x0,y0的距离的减小率。即,在本实施方式中,代替上述式(1)而使用下述式(6)来设定风险对象物的潜在风险rpi。
[0217]
【数学式6】
[0218][0219]
rpi:风险值
[0220]ci
_var:增益
[0221]
σi:坡度系数
[0222]
w:表示风的影响的系数
[0223]
x0,y0:风险对象物的基准位置的坐标
[0224]
i:用于区分风险对象物的编号
[0225]
表示风的影响的系数w可以是预先设定为多个等级的值中根据风速的大小而设定的值,也可以是将风速的倒数参照预先设定的基准进行标准化而被规定在预定的范围内的值。风速越大,则表示风的影响的系数w成为越大的值,伴随于此潜在风险的设定范围被扩大。
[0226]
图17~图18示出由本实施方式的驾驶辅助装置80生成的潜在风险和目标轨道的设定例。图17~图18所示的潜在风险和目标轨道的设定例与图4所示的场景中的设定例对应。
[0227]
如图17所示,在相对于本车辆1的行进方向从右侧刮强风的情况下,预测本车辆1的行驶轨迹从不考虑风的影响而设定的目标轨道t1偏离,本车辆1朝向停车车辆91的方向。因此,如图18所示,风险图生成部65进行将在行驶轨迹偏离的方向上存在的停车车辆91的潜在风险rp_ve的设定范围扩大的校正,并设定校正后的潜在风险rp_ve_r3。由此,以通过比图17所示的位置p1更远离停车车辆91的位置p5的方式设定目标轨道t5。因此,即使在本车辆1的行驶轨迹受到风的影响而偏离的情况下,也能够降低与停车车辆91的碰撞风险。
[0228]
图19是示出驾驶辅助装置80的处理动作的一例的流程图。图19所示的流程图是与示出第一实施方式的驾驶辅助装置50的动作例的图8进行替换的流程图,本实施方式的驾驶辅助装置80的处理动作由图19和图9示出。更具体而言,在本实施方式中,省略图8所示的步骤s17,并将步骤s23替换为步骤s61。此外,在本实施方式中,在图19所示的步骤s19和图9所示的步骤s27中针对风险对象物设定潜在风险时,使用上述式(6)来代替使用上述式(1)。
[0229]
具体地,如果车载系统启动(步骤s11),则控制部51执行本车辆1的行驶状态的信息的获取处理(步骤s13)、周围环境的信息的获取处理(步骤s15)、基本风险图生成处理(步骤s19)以及驾驶条件设定处理(步骤s21)。在步骤s19中,将上述式(6)中的表示风的影响的系数s设为“1”来设定基本潜在风险。
[0230]
接下来,驾驶条件设定部67基于由获取部61获取的风速和风向的信息,判定本车辆1的行驶轨迹是否受到风的影响。例如,驾驶条件设定部67在本车辆1在步骤s21中设定的本车辆1的目标轨道上行驶的期间判定为在从本车辆1朝向风险对象物的方向上刮的风的风速为预先设定的风速阈值以上的情况下,判定为本车辆1的行驶轨迹受到风的影响。如上所述,风速阈值可以是恒定的值,也可以是根据本车辆1的重量和/或路面摩擦状态而设定的值。
[0231]
以后,控制部51按照图9的流程图执行各步骤的处理。在预测为本车辆1的行驶轨迹受到风的影响的情况下(s25/是),在步骤s27中分别针对风险对象物设定的潜在风险反映风的影响,并且风速越大,所设定的潜在风险的设定范围越被扩大。因此,能够考虑根据风的影响而预测的本车辆1的行驶轨迹的偏离,设定能够降低与风险对象物的碰撞风险的目标轨道。
[0232]
如以上说明的那样,本公开的第四实施方式的驾驶辅助装置80在本车辆1在强风中行驶的情况下,预测由该风的影响引起的本车辆1的行进方向的偏离。此外,驾驶辅助装置80在本车辆1的行进方向偏离的方向上存在风险对象物的情况下,扩大该风险对象物的潜在风险的设定范围。由此,与基于扩大前的潜在风险而设定的目标轨道(t1)相比,以通过
更远离风险对象物的位置的方式设定目标轨道(t5)。因此,即使在假设本车辆1的行驶轨迹受到风的影响而偏离的情况下,也能够降低对风险对象物的碰撞风险。
[0233]
此外,本实施方式的驾驶辅助装置80使用将表示风的影响的系数w反映于潜在风险的坡度的上述式(6),设定风险对象物的潜在风险。因此,能够根据风速而扩大潜在风险的设定范围,并防止校正前后的目标轨道之差过度地变大。
[0234]
应予说明,第四实施方式的驾驶辅助装置80也可以与第一实施方式、第二实施方式或第三实施方式的驾驶辅助装置50、70组合而构成。在该情况下,表示针对风险对象物设定的潜在风险的上述式(1)、(3)、(4)、(5)分别被设定为对坡度系数σi乘以表示风的影响的系数w。
[0235]
此外,在第四实施方式中,作为可能成为本车辆1的行驶轨迹偏离的原因的外部环境因素的信息而使用了风速和风向的信息,但外部环境因素的信息也可以是道路的倾斜角度的信息。具体地,在道路的倾斜角度大的情况下,根据本车辆1的重力或伴随着行驶的惯性力,本车辆1的行驶轨迹有可能向倾斜的道路的下侧方向偏离。因此,驾驶辅助装置被构成为能够获取从检测道路坡度的倾斜传感器发送的传感器信号,并被构成为从本车辆1朝向风险对象物的方向的下降坡度越大,设定于该风险对象物的潜在风险的设定范围越被扩大。由此,与基于扩大前的潜在风险而设定的目标轨道(t1)相比,以通过更远离风险对象物的位置的方式设定目标轨道(t5)。因此,即使在假设本车辆1的行驶轨迹受到道路坡度的影响而偏离的情况下,也能够降低对风险对象物的碰撞风险。
[0236]
以上,参照附图对本发明的优选实施方式详细地进行了说明,但是本发明不限于该例。如果是具有本发明所属技术领域中的通常的知识的人员,则知晓在权利要求书所记载的技术思想的范畴内,能够想到各种变更例或修正例,并了解这些变更例或修正例当然也属于本发明的技术范围。
[0237]
例如,在上述实施方式中,驾驶辅助装置的全部功能搭载于本车辆1,但本发明并不限于该例。例如,也可以构成为驾驶辅助装置所具有的功能的一部分设置于能够经由移动体通信手段进行通信的服务器装置,驾驶辅助装置对该服务器装置收发数据。
[0238]
此外,以下的方式也属于本发明的技术范围。
[0239]
·
一种驾驶辅助装置,其处理器在车辆前方的一部分区域的路面摩擦系数为比周围的路面摩擦系数小的状态的情况下,对所述一部分区域的路面设定潜在风险。
[0240]
·
一种驾驶辅助装置,其处理器在车辆前方的整体的路面摩擦系数为比路面为干燥的状态的路面摩擦系数小的状态的情况下,增大位于所设想的偏离的方向上的风险对象物的潜在风险的值。
[0241]
·
一种计算机程序及记录有该计算机程序的记录介质,该计算机程序能够应用于基于对存在于车辆周围的风险对象物赋予潜在风险而生成的风险图来设定所述车辆的驾驶条件的驾驶辅助装置,使一个或多个处理器执行包括如下步骤的处理:获取车辆的周围环境的信息、获取可能成为车辆的行驶轨迹偏离的原因的外部环境因素的信息、以及基于外部环境因素的信息而将位于所设想的偏离的方向上的风险对象物的潜在风险的设定范围扩大。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。