1.本发明涉及一种车辆,尤其涉及轮内电动马达到车辆的安装。
背景技术:
2.为了符合安全要求,汽车通常包括一个或多个结构安全特征,通常称为撞击或碰撞区,其被设计成在汽车冲击时,在较长的时间段上,分散施加在汽车的乘员上的总力,从而减小施加在乘员上的峰值力并减小伤害的可能性。
3.出于吸收正面碰撞的冲击和/或后部冲击的目的,通常撞击区位于车辆的前部和/或后部。
4.因此,与没有一个或多个撞击区的车辆相比,撞击区为车辆乘员提供更好的保护以免受伤害。
5.为了使撞击区执行该功能,撞击区提供车辆的外部部件的受控弱化是必要的,而车辆的传动系和乘员所乘坐的车辆的内部部件具有增加的强度和刚度。
6.因此,用于提供受控弱化的车辆的外部部件与车辆的内部部件的分离可能损害车辆乘员可用的空间。
7.希望改善这种情况。
技术实现要素:
8.根据本发明的一个方面,提供了一种根据所附权利要求的车辆。
9.所要求保护的本发明具有以下优点:允许车辆的乘员可用的空间相对于车辆内使用的撞击区可用的空间增加。
附图说明
10.现在将通过示例的方式参考附图描述本发明,其中:
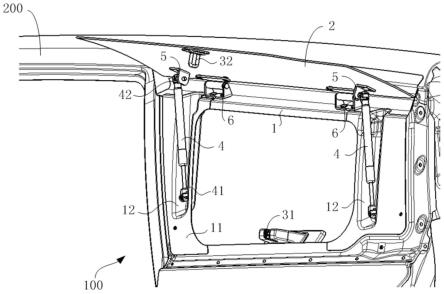
11.图1示出了根据本发明的实施例的车辆;
12.图2示出了本发明的实施例中使用的电动马达的分解图;
13.图3从另一角度示出了图2所示的电动马达的分解图。
具体实施方式
14.所描述的本发明的实施例用于具有乘客舱和一个或多个撞击区的车辆。撞击区相对于乘客舱具有减小的冲击阻力,并且出于一个实施例的目的,撞击区安置在乘客舱的前方。所述车辆具有第一车轮和第二车轮,第一车轮布置成由第一驱动源驱动,所述第一驱动源具有用于使所述第一车轮旋转的第一旋转轴,第二车轮布置成由第二驱动源驱动,所述第二驱动源具有用于使第二车轮旋转的第二旋转轴。所述第一车轮和所述第二车轮相对于彼此横向地位于所述车辆上,其中所述第一驱动源的第一轴和第二驱动源的第二轴线纵向地安置在所述撞击区的前部和后部之间,所述第一驱动源和第二驱动源布置成向所述车辆
提供驱动。另外或替代地,所述撞击区可以安置在所述乘客舱的后部。
15.优选地,第一和/或第二驱动源是轮内电动马达。
16.图1示出了根据本发明的实施例的车辆100。车辆100,例如轿车或卡车,包括四个车轮101,其中两个车轮分别位于车辆前部位置的近侧和远侧位置。类似地,其他两个车轮分别位于车辆尾部位置的近侧和远侧位置,这对于传统的轿车构造是典型的。然而,如本领域技术人员将理解的,车辆可以具有任何数量的车轮。
17.另外,车辆100包括包含乘客舱的安全区102、纵向地安置在安全区的前方的第一撞击区103和纵向地安置到安全区102的后方的第二撞击区104。尽管本实施例将车辆描述为具有分别安置在安全区102的前方和后方的两个撞击区,但是车辆可以仅具有安置在安全区102的前方或后方的一个撞击区。
18.第一撞击区和第二撞击区布置成在车辆与对象冲击时,在较长的时间段上分散施加到位于安全区102中的车辆的乘员的总力。
19.相对于第一撞击区和第二撞击区,安全区102形成刚性不可变形的舱,用于容纳车辆的乘员。
20.车辆的驱动源由轮内电动马达提供,其中,轮内电动马达结合在每个车轮101内。尽管当前实施例描述了具有与每个车轮101相关联的轮内电动马达的车辆100,但是如本领域技术人员将理解的,可以采用其他配置。例如,轮内电动马达可以仅位于前两个车轮或后两个车轮中。另外,尽管本实施例描述了使用轮内电动马达,但是也可以使用其它驱动源,例如轴向安装的电动马达。
21.如图1所示,各个轮内电动马达安装到车辆,使得每个轮内电动马达的轴安置在相应的撞击区的前部和后部之间,从而不需要在车辆的安全区内形成用于车辆的传动系。
22.各个轮内电动马达可以通过任何合适的方式,例如,经由如下所述的车轮轴承,安装到车辆。
23.为了本实施例的目的,在优选实施例中,如图2所示,各个轮内电动马达包括定子252,该定子包括散热器253、多个线圈254和安装在定子的后部中用于驱动线圈的电子模块255。线圈254形成在定子齿叠片结构上以形成线圈绕组,如下所述。定子盖256安装在定子252的后部上,包围电子模块255以形成定子252,该定子然后可以固定到车辆上并且在使用期间不相对于车辆旋转。
24.电子模块255包括两个控制装置400,其中每个控制装置400包括两个逆变器和控制逻辑,在本实施例中,控制逻辑包括处理器,用于控制两个逆变器的操作。尽管在本实施例中,电子模块255包括两个控制装置,但是同样,电子模块255可以包括单个控制装置或多于两个控制装置。
25.转子240包括前部220和形成盖的圆筒部221,该圆筒部221基本上围绕定子252。转子包括围绕圆筒部221的内侧布置的多个永磁体242。为了本实施例的目的,在圆筒部221的内侧上安装了32个磁体对。然而,可以使用任何数量的磁体对。
26.磁体紧邻定子252上的线圈绕组,使得由线圈产生的磁场与围绕转子240的圆筒部221的内侧布置的磁体242相互作用,以使转子240旋转。由于永磁体242被用来产生用于驱动电动马达的驱动扭矩,因此永磁体通常被称为驱动磁体。
27.转子240通过轴承座223附接到定子252。轴承座223可以是标准的轴承座,如在要
安装该马达组件的车辆中使用的那样。轴承座包括两个部分,固定到定子的第一部分和固定到转子的第二部分。轴承座固定到定子252的壁的中心部253,并且还固定到转子240的壳体壁220的中心部225。转子240因此通过在转子240的中心部225处的轴承座223旋转地固定到将与其一起使用的车辆,使得每个相应的轮内电动马达的转子的旋转轴安置在相应的撞击区的前部和后部之间。这具有的优点在于,然后可以使用普通的车轮螺栓将轮辋和轮胎在中心部225处固定到转子240,以将轮辋固定到转子的中心部,并且因此牢固地固定在轴承座223的可旋转侧上。车轮螺栓可以穿过转子的中心部225装配到轴承座本身。在转子240和车轮都安装在轴承座223上的情况下,在转子和车轮的旋转角度之间存在一对一对应关系。
28.图3从示出定子252和转子的相对侧示出了与图2相同的组件的分解图。转子240包括外转子壁220和周向壁221,磁体242周向地布置在周向壁内。如前所述,定子252经由在转子和定子壁的中心部处的轴承座连接到转子240上。
29.在转子的周向壁221与定子的外边缘之间设置v形密封件。
30.转子还包括用于位置感测的一组磁体227,或者称为换向磁体,其与安装在定子上的传感器结合允许估计转子通量角。转子通量角限定了驱动磁体与线圈绕组的位置关系。替代地,代替一组分开的磁体,转子可以包括磁性材料环,该磁性材料环具有充当一组分开的磁体的多个磁极。
31.为了允许换向磁体用于计算转子通量角,优选地,每个驱动磁体具有相关联的换向磁体,其中,通过校准所测量的换向磁体通量角,从与该组换向磁体相关联的通量角导出转子通量角。为了简化换向磁体通量角和转子通量角之间的相关性,优选地,该组换向磁体具有与该组驱动磁体对数量相同的磁体或磁极对,其中换向磁体和相关联的驱动磁体彼此大致径向对准。因此,为了本实施例的目的,该组换向磁体具有32个磁体对,其中每个磁体对与相应的驱动磁体对大致径向对准。
32.传感器,其在该实施例中为霍尔传感器,安装在定子上。传感器被安置成使得当转子旋转时,形成换向磁环的各个换向磁体中的每一个分别旋转经过传感器。
33.当转子相对于定子旋转时,换向磁体相应地旋转经过传感器,霍尔传感器输出ac电压信号,其中传感器输出经过传感器的每个磁体对的360电角度的完整电压循环。
34.为了改进位置检测,优选地,传感器包括从第一传感器移位90电角度放置的相关联的第二传感器。
35.在该实施例中,每个轮内电动马达包括四个线圈组,每个线圈组具有三个线圈子组,该三个线圈子组以y形布局耦合以形成三相子马达,从而导致马达具有四个三相子马达。第一控制装置耦合到两个线圈组,第二控制装置耦合到其它线圈组,其中相应控制装置中的每个逆变器布置成控制相应线圈组中的电流。然而,尽管本实施例描述了具有四个线圈组(即,四个子马达)的电动马达,但是马达可以同样具有一个或多个具有相关联的控制装置的线圈组(即,单个马达或具有两个或更多个子马达的马达)。例如,在优选实施例中,马达40包括八个线圈组,每个线圈组具有三个线圈子组,它们以y形布局耦合以形成三相子马达,从而导致马达具有八个三相子马达。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。