技术特征:
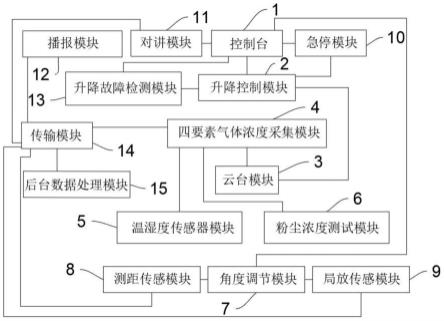
1.智能巡检机器人系统,其特征在于,包括:控制台(1),所述控制台(1)在智能机器人在使用前进行预设,并且将各个指令传输到各个模块当中去;升降控制模块(2),所述升降控制模块(2)通过控制台(1)预设的指令进行升降活动;云台模块(3),所述云台模块(3)起到固定作用,并且云台模块(3)跟随升降控制模块(2)进行升降;四要素气体浓度采集模块(4),所述四要素气体浓度采集模块(4)通过四种不同的技术手段对不同的气体进行分析,并且将各个分析的结果进行储存,然后进行传输;温湿度传感器模块(5),所述温湿度传感器模块(5)在巡检机器人正常使用的过程中,对空气中的温湿度进行分析,并且将分析结果和以往的分析结果进行比对,如果出现了异常,会将现场定位发送到有关部门,防止发生意外。粉尘浓度测试模块(6),所述粉尘浓度测试模块(6)在运行的过程中会对空气中的粉尘浓度进行检测,因为粉尘在空气中漂浮遇,如果浓度过高在遇到明火或者较为强烈的震动时,则会发生爆炸,如果粉尘的弄到超过预设值则会直接将具体的位置信息进行上报,由工作人员进行紧急处理,提高施工时的安全性,为施工人员的安全提供保障;角度调节模块(7),所述角度调节模块(7)收到升降控制模块(2)的指令后开始进行升降工作;测距传感模块(8),所述测距传感模块(8)对电线位置进行距离检测,然后智能巡检机器人则会向具体检测到的位置进行移动;局放传感模块(9),所述局放传感模块(9)在角度调节模块(7)和测距传感模块(8)工作过后,便开始对电线进行检测,通过采集电线上流动的高频脉冲电流信号,通过对信号高频分量分析,可确定电线是否有放电,及放电的严重程度,若有放电情况则会将位置信息传输,由工作人员进行维修,提高工作人员工作时的安全性;急停模块(10),所述急停模块(10)在装置遇到环境异常的状态下,紧急对升降控制模块(2)发出指令,使升降控制模块(2)停止工作,对周围环境进行细致的检测;对讲模块(11),所述对讲模块(11)可以使工作人员在使用本装置的过程中给后台的工作人员进行留言,后台人员接收到留言后便可做出反应;播报模块(12),所述播报模块(12)可以将后台的一些指令通过语音播报的方式传达;升降故障检测模块(13),所述升降故障检测模块(13)在装置工作之前对升降控制模块(2)对其进行检测,防止升降控制模块(2)发生损坏,装置在使用的过程中无法进行升降;传输模块(14),所述传输模块(14)可以使对讲模块(11)、四要素气体浓度采集模块(4)、测距传感模块(8)和局放传感模块(9)的数据进行传输,导入到后台进行处理;后台数据处理模块(15),所述后台数据处理模块(15)将传输模块(14)导入的数据进行接收,如果数据异常将会发出警报,提醒后台的工作人员。2.根据权利要求1所述的智能巡检机器人系统,其特征在于:所述云台模块(3)包括红外线拍摄模块(301)、可见光拍摄模块(302)。3.根据权利要求2所述的智能巡检机器人系统,其特征在于:所述云台模块(3)可以将红外线拍摄模块(301)和可见光拍摄模块(302)进行固定,所述红外线拍摄模块(301)可以对周围环境较为昏暗的地方进行拍摄,查看环境是否异常,所述可见光拍摄模块(302)对不
可见光进行拍摄。4.根据权利要求2所述的智能巡检机器人系统,其特征在于:所述红外线拍摄模块(301)通过局域网与四要素气体浓度采集模块(4)无线连接,所述红外线拍摄模块(301)通过局域网与四要素气体浓度采集模块(4)无线连接。5.根据权利要求3所述的智能巡检机器人系统,其特征在于:所述控制台(1)通过导线与升降控制模块(2)电性连接,所述升降控制模块(2)通过导线与云台模块(3)电性连接,所述四要素气体浓度采集模块(4)通过局域网与云台模块(3)电性连接,所述四要素气体浓度采集模块(4)通过导线与温湿度传感器模块(5)电性连接,所述四要素气体浓度采集模块(4)通过导线与粉尘浓度测试模块(6)电性连接。6.根据权利要求1所述的智能巡检机器人系统,其特征在于:所述急停模块(10)与升降控制模块(2)通过导线电性连接,所述升降故障检测模块(13)通过导线与升降控制模块(2)电性连接,所述对讲模块(11)通过导线与传输模块(14)电性连接,所述播报模块(12)通过导线与传输模块(14)电性连接。7.根据权利要求1所述的智能巡检机器人系统,其特征在于:所述测距传感模块(8)通过导线与传输模块(14)电性连接,所述局放传感模块(9)通过导线与传输模块(14)电性连接,所述传输模块(14)通过局域网与后台数据处理模块(15)无线连接。
技术总结
本发明提供智能巡检机器人系统,涉及巡检机器人环境检测技术领域。该智能巡检机器人系统,控制台,所述控制台在智能机器人在使用前进行预设,并且将各个指令传输到各个模块当中去,云台模块主要是起到固定作用,并且云台模块跟随升降控制模块进行升降云台模块在使用的过程中,会对周围环境较为昏暗的地方进行拍摄,查看环境是否异常,可见光拍摄模块则对波长<380nm或者>760nm的不可见光进行拍摄,如果红外线拍摄模块或者可见光拍摄模块两个模块发生了异常直接将数据传输模块处,并且温湿度传感器模块会在巡检机器人正常使用的过程中,对空气中的温湿度进行分析,并且将分析结果和以往的分析结果进行比对。以往的分析结果进行比对。以往的分析结果进行比对。
技术研发人员:魏玉虎 张亮
受保护的技术使用者:中能智旷(北京)科技有限公司
技术研发日:2021.08.06
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。