1.本发明涉及航天系统技术领域,更确切地说,涉及一种针对干扰与无角速度反馈的姿态 协同跟踪控制方法。
背景技术:
2.基于不同航天任务的要求,由单一航天器独自完成任务的工作方式已经难以满足一些实 际工程的需求,多航天器编队协同工作模式应运而生。姿态协同控制作为多航天器编队飞行 的关键技术,且由于其在合成孔径成像、重力场测量、三维立体成像、卫星捕捉、空基干涉 测量和远程通信等编队任务中的重要作用而备受关注。
3.由于航天器编队所处太空环境复杂,航天器在飞行过程中,不可避免地会受到各种太空 环境干扰力矩的影响,较为常见的是重力梯度力矩、气动力矩、地磁力矩、太阳光压力矩和 电磁力矩,这些干扰会对航天器编队姿态产生较大的影响,导致姿态产生偏差,进而影响航 天器编队系统的稳定性和相对指向精度。同时,由于航天器长期处于高低温、强辐射的太空 环境下,角速率陀螺不可避免的会出现故障,导致无法准确获取角速度信息。目前,姿态协 同控制技术得到了快速发展,但是尚未综合考虑太空未知时变干扰和无角速度反馈对编队航 天器稳定性的影响。因此,为了提高航天器姿态控制系统的鲁棒性,有必要考虑未知时变干 扰和无法获取角速度信息的情况,研究一种针对干扰和无角速度反馈的姿态协同跟踪控制方 法,具有重大的现实意义和实用价值。
技术实现要素:
4.本发明正是为了解决上述技术问题而设计的一种针对干扰与无角速度反馈的姿态协同跟 踪控制方法,综合考虑干扰、无角速度反馈及只有部分跟随者能够获得领航者信息的编队航 天器工况,构建了固定时间扩张状态观测器、分布式固定时间状态观测器及滤波辅助系统, 获得针对干扰和无角度反馈的姿态协同跟踪控制器,然后采用该姿态协同跟踪控制器使航天 器编队姿态进行协同跟踪控制,进一步提高了控制系统的鲁棒性和实用性。
5.本发明解决其技术问题所采用的技术方案是:
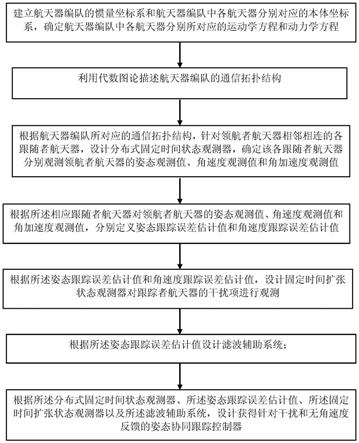
6.一种针对干扰与无角速度反馈的姿态协同跟踪控制方法,其特征在于:针对由n个跟随 者航天器和1个领航者航天器组成的航天器编队,执行如下步骤,构建固定时间扩张状态观 测器、分布式固定时间状态观测器、滤波辅助系统,获得针对干扰和无角度反馈的姿态协同 跟踪控制器,然后采用该姿态协同跟踪控制器使航天器编队姿态进行协同跟踪控制:
7.步骤1:通过建立航天器编队的惯量坐标系和航天器编队中各航天器分别对应的本体坐 标系,确定航天器编队中各航天器分别所对应的运动学方程和动力学方程;
8.步骤2:利用代数图论,描述航天器编队所对应以领航者航天器为根节点的树形通信拓 扑结构;
9.步骤3:根据航天器编队所对应的树形通信拓扑结构,针对领航者航天器相邻相连的各 跟随者航天器,设计分布式固定时间状态观测器,确定该各跟随者航天器分别观测领航者航 天器的姿态观测值、角速度观测值和角加速度观测值;
10.步骤4:根据所述相应跟随者航天器对领航者航天器的姿态观测值、角速度观测值和角 加速度观测值,分别定义姿态跟踪误差估计值和角速度跟踪误差估计值;
11.步骤5:根据所述姿态跟踪误差估计值和角速度跟踪误差估计值,设计固定时间扩张状 态观测器对跟踪者航天器的干扰项进行观测;
12.步骤6:根据所述姿态跟踪误差估计值设计滤波辅助系统;
13.步骤7:根据所述分布式固定时间状态观测器、所述姿态跟踪误差估计值、所述固定时 间扩张状态观测器以及所述滤波辅助系统,设计获得针对干扰和无角速度反馈的姿态协同跟 踪控制器。
14.作为本发明的一种优选技术方案,所述步骤1中航天器编队中各航天器的运动学方程为:
[0015][0016]
航天器编队中各航天器的动力学方程为:
[0017][0018]
其中,i=0,1,
…
,n,i=0表示领航者航天器,其它的为跟随者航天器,跟随者跟踪领航者 航天器,和分别为矢量和标量,r4表示四维实数列向量,是以单位四元数形 式表示航天器编队中第i个航天器的姿态,i是单位矩阵,ωi∈r3表示航天器的角速度,r3表 示三维实数列向量,
·
代表变量的导数,即分别为航天器姿态和航天器角速度的导数, 上标t表示转置,
×
表示斜对称矩阵含义,即是ωi=[ω
i1
,ω
i2
,ω
i3
]
t
的斜对称矩阵 ω
i1
、ω
i2
、ω
i3
为ωi的元素,ji∈r3×3是航天器转动惯量矩阵,r3×3表示三 行三列的实数矩阵,τi∈r3和di∈r3分别表示航天器的执行机构控制力矩和干扰力矩。
[0019]
作为本发明的一种优选技术方案,所述步骤2中航天器编队的树形拓扑结构中只有领航 者航天器相邻相连的各跟随者航天器可以获得领航者航天器的信息。
[0020]
作为本发明的一种优选技术方案,所述步骤3中所述分布式固定时间状态观测器为:
[0021][0022][0023]
[0024][0025]
其中,σi和ρi分别为第i个航天器对领航者状态ω0和的观测值,r1、r2、 r3、r4、r5、r6、r7、r8和θi均为正常数且均为正常数且是ω0的二阶导数,a
ij
是邻接矩阵元素, 用于表述第i个航天器和第j个航天器之间的通信状况,如果存在从航天器j到i的通信,a
ij
>0;相反,如果不存在从航天器j到i的通信,a
ij
=0;a
i0
为领航者邻接矩阵元素,当j≠0时, 第j个航天器对领航者的姿态观测值为角速度观测值为σj∈r3和角加速度观测值 为ρj∈r3,当j=0时,σ0和ρ0分别表述的是领航者状态ω0和sig
α
()为 幂函数,对于任意变量xi=[x
i1
,x
i2
,x
i3
]
t
而言,其幂函数sig
α
(xi)为 sig
α
(xi)=[sign(x
i1
)|x
i1
|
α
,sign(x
i2
)|x
i2
|
α
,sign(x
i3
)|x
i3
|
α
]
t
,sign()为标准的符号函数,幂函数sig
p
(xi)为 sig
p
(xi)=[sign(x
i1
)|x
i1
|
p
,sign(x
i2
)|x
i2
|
p
,sign(x
i3
)|x
i3
|
p
]
t
,为σi的导数,为的导数,为的导数, n为跟随航天器的数量。
[0026]
作为本发明的一种优选技术方案,所述步骤4中所述姿态跟踪误差估计值为:
[0027][0028][0029]
角速度跟踪误差估计值ω
ie
为:
[0030]
ω
ie
=ω
i-ciσi,
[0031]
式中为旋转矩阵,和分别为姿态跟踪误差矢量部分和标 量部分。
[0032]
作为本发明的一种优选技术方案,所述步骤5中所述固定时间扩张状态观测器为:
[0033][0034][0035][0036]
式中,0<αi<1、pi>1、γ
i1
>0、γ
i2
>0、γ
i3
>0、γ
i4
>0、γ
i5
>0和γ
i6
>0为所述固定时间扩 张状态观测器参数,ξ
i1
、ξ
i2
和ξ
i3
为所述固定时间扩张状态观测器状态,
[0037]
作为本发明的一种优选技术方案,所述步骤6中所述滤波辅助系统为:
[0038]
[0039][0040]
式中,表示所述滤波辅助系统四元数矢量,表示所述滤波辅助系统四元数标量,和 分别表示单位四元数矢量和标量,上标t表示转置,表示的导数,表示的导数,ci为正实数。
[0041]
作为本发明的一种优选技术方案,所述步骤7中所述姿态协同跟踪控制器τi包括:
[0042][0043]
式中,k
1i
为正实数,和分别表示所述姿态跟踪误差估计值的矢量部分和标量部分, ρi和σi为所述分布式固定时间状态观测器的状态变量,k
2i
为正实数,和为所述滤波辅助 系统的状态变量,ci表示旋转矩阵上标
×
表示斜对称算子矩阵, ji表示所述航天器的惯量矩阵,k
3i
为正实数,ξ
i2
和ξ
i3
为所述固定时间扩张状态观测器的状态 变量。
[0044]
本发明的有益效果是:所述一种针对干扰和无角速度反馈的姿态协同跟踪控制方法,针 对复杂干扰、通信资源、观测时间、无法获取角速度信息的考虑更为完善,具体优点包括:
[0045]
(1)综合考虑干扰、无角速度反馈及只有部分跟随者航天器能够获得领航者航天器信息 的航天器编队工况,分别设计了固定时间扩张状态观测器、分布式固定时间状态观测器及滤 波辅助系统;
[0046]
(2)所述固定时间扩张状态观测器与传统渐近稳定扩张状态观测器相比,观测时间更短, 观测精度更高,可以在固定观测时间内使所述固定时间扩张状态观测器观测值趋近于被观测 干扰项的真实值,所述固定时间扩张状态观测器与传统有限时间扩张状态观测器相比,可以 在固定观测时间内使所述观测值趋近于真实值且所述固定时间不依赖于所述航天器编队系统 的状态初始值;
[0047]
(3)所述分布式固定时间状态观测器可以使只有部分跟随者航天器能够获得领航者航天 器信息的航天器编队在固定时间内观测到所述领航者航天器状态的真实值,与传统分布式渐 近稳定观测器和传统分布有限时间扩张状态观测器相比,具有所述观测时间短和所述固定时 间不依赖于所述分布式固定时间状态观测器的状态初始值;
[0048]
(4)根据所述固定时间扩张状态观测器、所述分布式固定时间状态观测器及所述滤波辅 助系统,设计了一种针对干扰和无角速度反馈的姿态协同跟踪控制方法,提高了编队航天器 姿态控制系统的鲁棒性。
[0049]
本发明完善了干扰、无角速度反馈的航天器姿态协同跟踪控制策略,通过合理的观测器 设计和滤波辅助系统设计,实现仅有部分跟随者可获得领航者信息的通信拓扑下的干扰、无 角速度反馈的姿态协同控制方法,且能够使航天器协同跟踪误差系统快速的收敛,同时,设 计滤波辅助系统补偿了无角速度信息反馈的影响,进一步提高了控制系统的鲁棒性和实用性。
附图说明
[0050]
图1为一种针对干扰和无角速度反馈的姿态协同跟踪控制方法流程图;
[0051]
图2为一种针对干扰和无角速度反馈的姿态协同跟踪控制示意图;
[0052]
图3为航天器编队中各航天器之间的通信拓扑图。
具体实施方式
[0053]
以下结合附图对本发明进一步详细说明。
[0054]
如图1所示,一种针对干扰与无角速度反馈的姿态协同跟踪控制方法,针对由n个跟随 者航天器和1个领航者航天器组成的航天器编队,执行如下步骤,构建固定时间扩张状态观 测器、分布式固定时间状态观测器、滤波辅助系统,获得针对干扰和无角度反馈的姿态协同 跟踪控制器,然后采用该姿态协同跟踪控制器使航天器编队姿态进行协同跟踪控制:
[0055]
步骤1:通过建立航天器编队的惯量坐标系和航天器编队中各航天器分别对应的本体坐 标系,确定航天器编队中各航天器分别所对应的运动学方程和动力学方程;
[0056]
航天器编队中各航天器的运动学方程为:
[0057][0058]
航天器编队中各航天器的动力学方程为:
[0059][0060]
其中,i=0,1,
…
,n,i=0表示领航者航天器,其它的为跟随者航天器,跟随者跟踪领航者 航天器,和分别为矢量和标量,r4表示四维实数列向量,是以单位四元数形 式表示航天器编队中第i个航天器的姿态,i是单位矩阵,ωi∈r3表示航天器的角速度,r3表 示三维实数列向量,
·
代表变量的导数,即分别为航天器姿态和航天器角速度的导数, 上标t表示转置,
×
表示斜对称矩阵含义,即是ωi=[ω
i1
,ω
i2
,ω
i3
]
t
的斜对称矩阵 ω
i1
、ω
i2
、ω
i3
为ωi的元素,ji∈r3×3是航天器转动惯量矩阵,r3×3表示三 行三列的实数矩阵,τi∈r3和di∈r3分别表示航天器的执行机构控制力矩和干扰力矩。
[0061]
步骤2:利用代数图论,描述航天器编队所对应以领航者航天器为根节点的树形通信拓 扑结构;为减少通信路径和避免资源浪费,本发明采用通信量较少的通信拓扑结构,其包括 一个领航者为根节点的有向生成树,航天器编队的树形拓扑结构中只有领航者航天器相邻相 连的各跟随者航天器可以获得领航者航天器的信息。a
ij
是邻接矩阵元素,用于表述第i个航天 器和第j个航天器之间的通信状况,如果存在从航天器j到i的通信,a
ij
>0;相反,a
ij
=0; bi=a
i0
为领航者邻接矩阵元素。
[0062]
如图3所示,航天器编队系统中航天器之间的通信拓扑图为:以一个领航者为根节点的 有向生成树且仅有部分跟随者航天器可以获得领航者航天器信息,航天器0为领航者航天器, 航天器1、2、3、4、5为跟随者航天器,且只有航天器1、2能够获得领航者航天器0的
信息, 航天器4仅与航天器5有通信,航天器1与航天器2和3进行通信。
[0063]
步骤3:根据航天器编队所对应的树形通信拓扑结构,针对领航者航天器相邻相连的各 跟随者航天器,设计分布式固定时间状态观测器,确定该各跟随者航天器分别观测领航者航 天器的姿态观测值、角速度观测值和角加速度观测值;
[0064]
分布式固定时间状态观测器为:
[0065][0066][0067][0068][0069]
其中,σi和ρi分别为第i个航天器对领航者状态ω0和的观测值,r1、r2、 r3、r4、r5、r6、r7、r8和θ1均为正常数且均为正常数且是ω0的二阶导数,a
ij
是邻接矩阵元素, 用于表述第i个航天器和第j个航天器之间的通信状况,如果存在从航天器j到i的通信, a
ij
>0;相反,如果不存在从航天器j到i的通信,a
ij
=0;a
i0
为领航者邻接矩阵元素,当j≠0时, 第j个航天器对领航者的姿态观测值为角速度观测值为σj∈r3和角加速度观测值 为ρj∈r3,当j=0时,σ0和ρ0分别表述的是领航者状态ω0和sig
α
()为 幂函数,对于任意变量xi=[x
i1
,x
i2
,x
i3
]
t
而言,其幂函数sig
α
(xi)为 sig
α
(xi)=[sign(x
i1
)|x
i1
|
α
,sign(x
i2
)|x
i2
|
α
,sign(x
i3
)|x
i3
|
α
]
t
,sign()为标准的符号函数,幂函数sig
p
(xi)为 sig
p
(xi)=[sign(x
i1
)|x
i1
|
p
,sign(x
i2
)|x
i2
|
p
,sign(x
i3
)|x
i3
|
p
]
t
,为σi的导数,为的导数,为的导数, n为跟随航天器的数量
[0070]
步骤4:根据所述相应跟随者航天器对领航者航天器的姿态观测值、角速度观测值和角 加速度观测值,分别定义姿态跟踪误差估计值和角速度跟踪误差估计值;
[0071]
姿态跟踪误差估计值为:
[0072][0073][0074]
角速度跟踪误差估计值ω
ie
为:
[0075]
ω
ie
=ω
i-ciσi,
[0076]
式中为旋转矩阵,和分别为姿态跟踪误差矢量部分和标 量部分。
[0077]
步骤5:根据所述姿态跟踪误差估计值和角速度跟踪误差估计值,设计固定时间扩
张状 态观测器对跟踪者航天器的干扰项进行观测;
[0078]
固定时间扩张状态观测器为:
[0079][0080][0081][0082]
式中,0<αi<1、pi>1、γ
i1
>0、γ
i2
>0、γ
i3
>0、γ
i4
>0、γ
i5
>0和γ
i6
>0为所述固定时间扩 张状态观测器参数,ξ
i1
、ξ
i2
和ξ
i3
为所述固定时间扩张状态观测器状态,
[0083]
步骤6:根据所述姿态跟踪误差估计值设计滤波辅助系统;
[0084]
滤波辅助系统为:
[0085][0086][0087]
式中,表示所述滤波辅助系统四元数矢量,表示所述滤波辅助系统四元数标量,和 分别表示单位四元数矢量和标量,上标t表示转置,表示的导数,表示的导数,ci为正实数。
[0088]
步骤7:根据所述分布式固定时间状态观测器、所述姿态跟踪误差估计值、所述固定时 间扩张状态观测器以及所述滤波辅助系统,设计获得针对干扰和无角速度反馈的姿态协同跟 踪控制器。
[0089]
如图2所示,姿态协同跟踪控制器τi包括:
[0090][0091]
式中,k
1i
为正实数,和分别表示所述姿态跟踪误差估计值的矢量部分和标量部分, ρi和σi为所述分布式固定时间状态观测器的状态变量,k
2i
为正实数,和为所述滤波辅助 系统的状态变量,ci表示旋转矩阵上标
×
表示斜对称算子矩阵, ji表示所述航天器的惯量矩阵,k
3i
为正实数,ξ
i2
和ξ
i3
为所述固定时间扩张状态观测器的状态 变量。
[0092]
上述步骤中,航天器姿态可以通过航天器自身所配备的传感器来测量的。
[0093]
上述技术方案所设计的一种针对干扰与无角速度反馈的姿态协同跟踪控制方法,综合考 虑干扰、无角速度反馈以及只有部分跟随者航天器能够获得领航者航天器信息的航天器编队 的工况,针对复杂干扰、通信资源、观测时间、无法获取角速度信息的考虑更为完善,构建 了固定时间扩张状态观测器、分布式固定时间状态观测器、滤波辅助系统,并获得针对干扰 和无角度反馈的姿态协同跟踪控制器,然后采用该姿态协同跟踪控制器使航
天器编队姿态进 行协同跟踪控制,实现仅有部分跟随者航天器可获得领航者航天器信息的通信拓扑下的干扰、 无角速度反馈的姿态协同控制方法,且能够使航天器协同跟踪误差系统快速的收敛,进一步 提高了控制系统的鲁棒性和实用性。
[0094]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式, 在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种 变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。