1.本实用新型涉及清洁设备技术领域,尤其涉及一种水气分离装置及清洗机器人。
背景技术:
2.随着现代化城市发展,城市中一座座高楼耸立,对于高层建筑的玻璃幕墙清洗工作也越来越多,传统的清理方式是由人工高空作业清洗,此作业方式非常危险。为了替换传统的高楼幕墙清理方式,出现了高空平面洗墙机器人作为代替。
3.因为高空作业时间长,清洗面积大,机器人内部水箱面积小,所以机器人使用水循环系统来将清洗过后的清洁液体重新收集利用进行清洗,而重新收集的清洁液体要通过水气分离装置进行水气分离处理,进一步回收利用。目前清洗机器人上常用的水气分离装置仅满足于机器人沿竖直方向上、下移动过程的水气分离功能,但是,清洗机器人在竖直的墙面上运动为水平时,水气分离装置的功能失效,因此需对水气分离装置进行改进。
技术实现要素:
4.本实用新型提供一种水气分离装置及清洗机器人,用以解决现有技术中水气分离装置难以满足清洗机器人的工作需求的缺陷,实现清洗机器人在不同的姿态下,流体混合物顺利分离,满足清洁液体的回收再利用。
5.本实用新型提供一种水气分离装置,包括:
6.壳体;
7.分隔件,所述分隔件设于所述壳体内,所述分隔件将所述壳体内部空间分隔为相互通气的第一空间和第二空间;
8.导入管,所述导入管与所述壳体连接,且所述导入管与所述第一空间连通;
9.排水管,所述排水管与所述壳体连接;
10.排气管,所述排气管与所述壳体连接,所述排气管与所述第二空间连通;
11.配重件,所述配重件与所述排水管通过通水软管连通,所述配重件和所述通水软管均位于所述第一空间内,所述第一空间通过所述配重件、所述通水软管与所述排水管连通,所述配重件在重力作用下运动到所述第一空间底部,所述第一空间底部的水适于通过所述配重件、所述通水软管以及排水管排出。
12.根据本实用新型提供的一种水气分离装置,所述分隔件包括相交设置的第一板体和第二板体,所述导入管位于所述第一板体的一侧,所述排气管位于所述排气管的另一侧,所述第二板体上设有镂空部。
13.根据本实用新型提供的一种水气分离装置,所述分隔件还包括加强板,所述加强板连接在所述第一板体和所述第二板体之间;
14.所述加强板为间隔开的多个。
15.根据本实用新型提供的一种水气分离装置,所述第一板体为弧形板,且所述弧形板环绕于所述导入管或者环绕于所述排气管的外周。
16.根据本实用新型提供的一种水气分离装置,所述分隔件上设有第一卡接部,所述壳体内壁设有与所述第一卡接部卡接的第二卡接部。
17.根据本实用新型提供的一种水气分离装置,所述分隔件上设有多条交错分布的加强筋条。
18.根据本实用新型提供的一种水气分离装置,所述导入管为多个,每个所述导入管均与所述第一空间连通。
19.根据本实用新型提供的一种水气分离装置,所述导入管和所述排气管均位于所述壳体的同一侧壁上。
20.根据本实用新型提供的一种水气分离装置,还包括水气分离风机,所述水气分离风机的进风端与所述排气管连通。
21.本实用新型还提供一种清洗机器人,包括如上所述的水气分离装置。
22.本实用新型提供的水气分离装置,通过在壳体内设置分隔件,可以将壳体内部空间分隔为第一空间和第二空间,这样流体混合物通过导入管进入壳体内部后,在重力的作用下可以进行水气分离,使得液体沉积于壳体底部,而气体从壳体内排出,由此利于清洁液体的回收再利用,且该水气分离装置运用于清洗机器人中,其能够适应机器人沿水平、竖直或者其他倾斜角度的运动需求。
附图说明
23.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
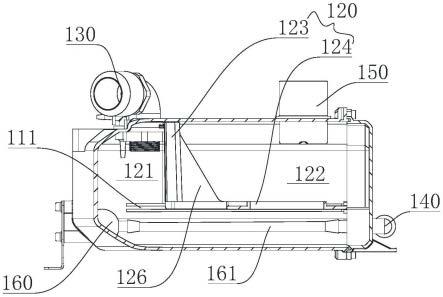
24.图1是本实用新型提供的水气分离装置的立体图;
25.图2是本实用新型提供的水气分离装置的剖视图;
26.图3是本实用新型提供的分隔件的结构示意图;
27.附图标记:
28.100、水气分离装置;
29.110、壳体;111、第二卡接部;
30.120、分隔件;121、第一空间;122、第二空间;123、第一板体;124、第二板体;125、镂空部;126、加强板;127、加强筋条;128、第一卡接部;
31.130、导入管;
32.140、排水管;
33.150、排气管;
34.160、配重件;161、通水软管。
具体实施方式
35.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人
员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
36.下面结合图1-图3描述本实用新型实施例的水气分离装置100及清洗机器人。需要说明的是,清洗机器人可以用清洁玻璃幕墙,属于高空平面洗墙机器人,亦可以称为“蜘蛛人”。清洗机器人吸附在高楼外立面上,采用刷—洗—刮多重清洁设计,清洁系统紧密贴合墙面,每一块玻璃都经过多次清洗。
37.清洗机器人在工作时,其所使用的清洁液体可以经过回收、过滤后可循环使用。清洗机器人的清洁液体在回收时,可以通过负压装置将清洁液体吸入到特定的空间或容器内,而被吸收的流体为包括液体、气体的混合物。回收后的混合物需要经过水气分离装置100,以将清洁液体和气体进行分离,分离出来的液体直接或经过过滤后可以返回到水箱或其他容器内,从而可以进行重复利用。
38.结合图1所示,根据本实用新型实施例的水气分离装置100,包括壳体110、分隔件120、导入管130、排水管140、排气管150和配重件160。
39.具体而言,参见图2所示,分隔件120设于壳体110内,分隔件120将壳体110内部空间分隔为相互通气的第一空间121和第二空间122。流体混合物进入到壳体110内部后,液体可以进入第一空间121内,而气体可以经第一空间121进入到第二空间122内。
40.参见图1所示,导入管130与壳体110连接,且导入管130与第一空间121连通。这里,导入管130可以将混合有气体和清洁液体的混合物导引至壳体110内部。由此可以使混合物定向流动。排气管150与壳体110连接,也就是说,壳体110可以作为排气管150的安装、支撑结构。排气管150与第二空间122连通,被分离出来的气体,进入第二空间122后,可以通过排气管150从第二空间122内流出。
41.参见图1和图2所示,排水管140与壳体110连接,配重件160与排水管140通过通水软管161连通,配重件160和通水软管161均位于第一空间121内,第一空间121通过配重件160、通水软管161与排水管140连通,配重件160在重力作用下运动到第一空间121底部,第一空间121底部的液体通过配重件160、通水软管161排出。
42.需要说明的是,清洗机器人的工作位置可以是水平面、倾斜面或者竖直面,当清洗机器人处于不同的工作位置时,清洗机器人所呈现的姿态不相同,对应地,壳体110最低点不同,在重力的作用下,壳体110内的液体流向最低处。配重件160在重力的作用下,也将会运动到壳体110的底部,从而液体可以通过配重件160、通水软管161将壳体110内的液体排出。这样,通过设置配重件160和通水软管161,可以方便将壳体110内的液体排出。
43.下面结合流体混合物的流动过程描述根据本实用新型实施例的水气分离装置100:
44.流体混合物通过导入管130进入壳体110内部,由于气体和液体的重力不同,液体在重力作用下流向第一空间121内部,气体进入第二空间122,从而达到水气分离的目的。然后,进入到第二空间122的气体,通过排气管150进行排气,液体可以通过配重件160、通水软管161及排水管140中排出。
45.根据本实用新型实施例的水气分离装置100,通过在壳体110内设置分隔件120,可以将壳体110内部空间分隔为第一空间121和第二空间122,这样流体混合物通过导入管130进入壳体110内部后,由于分隔件120的设置,使得导入管130的出口端和排气管150的进气
端分隔,并延长流体混合物在壳体110内行走的距离,使得流体混合物易于在重力的作用下可以进行水气分离,由此利于清洁液体的回收再利用。
46.根据本实用新型的一些实施例,结合图2和图3所示,分隔件120包括构造出相交设置的第一板体123和第二板体124。多个第一板体123和多个第二板体124的可以组成的相互设置结构有以下结构,例如图2中第一板体123与第二板体124组成的l型结构,以第一板体123与第二板体124之间夹角为其他角度组成的结构,两个第一板体123分别安装在第二板体124的前后两端形成u型结构等等结构。导入管130位于第一板体123的一侧,排气管150位于排气管150的另一侧,第二板体124上设有镂空部125。例如,第一板体123的一端和第二板体124的一端连接,第一板体123与第二板体124垂直。
47.这里,第一板体123可以将液体通道和气体通道分隔开,防止液体和气体再次混合,导致分离失效。此外,通过在第二板体124上设置镂空部125,气体可以通过镂空部125,流向第二空间122,由此可以提升水气分离效率。另外,配重件160位于第二板体124的一侧,排气管150位于第二板体124的另一侧,这样第二板体124可以将配重件160和通水软管161限定在第一空间121内,防止配重件160进入到第二空间122。
48.根据本实用新型的一些实施例,参见图3所示,分隔件120还包括加强板126,加强板126连接在第一板体123和第二板体124之间。加强板126可以提升第一板体123和第二板体124之间的连接强度。在一些实施例中,加强板126可以为间隔开的多个,例如加强板126可以为两个或者三个。
49.需要说明的是,由于第一空间121的水位变化或者清洗机器人的工作姿态的变化,可能导致配重件160撞击分隔件120,为了进一步加强分隔件120的结构强度,根据本实用新型的一些实施例,参见图3所示,分隔件120上可以设有多条交错分布的加强筋条127,这样可以提高整体结构的稳定性。
50.根据本实用新型的一些实施例,参见图2和图3所示,第一板体123为弧形板,且弧形板环绕于所述导入管130或者环绕于所述排气管150的外周。流体混合物在负压下进入壳体110内腔内部时,其流速快,会引起飞溅,为了防止这种情况弧形板环绕于导入管130或排气管150均可以有效地降低流体混合物的流速,阻挡液体飞溅直接地进入排气管150。此外,弧形板环绕于导入管130的结构对流体混合物的流向起到导引作用,将流体混合物导引至流向第一空间121内。
51.根据本实用新型的一些实施例,第一板体123的左右两侧中的至少一侧与壳体110内壁之间可以保持通气间隙,通过该通气间隙可以连通第一空间121与第二空间122,这样,当水气分离装置100处于水平状态下,且第一空间121内的水没过镂空部125时,可通过第一板体123侧部的通气间隙进行通气,以保证水气分离的可靠性。
52.根据本实用新型的一些实施例,结合图2和图3所示,分隔件120上设有第一卡接部128,壳体110内壁设有与第一卡接部128卡接的第二卡接部111。分隔件120与壳体110形成卡接连接,使分隔件120稳定地固定在壳体110内腔中,提高装置整体的牢固性。
53.根据本实用新型的一些实施例,结合图1所示,导入管130可以为多个,每个导入管130均与第一空间121连通。这样,流体混合物可以从多个导入管130进入壳体110内的第一空间121,提高水气分离处理量。根据本实用新型的一些实施例,参见图1所示,导入管130和排气管150均位于壳体110的同一侧壁上。由此可以提升水气分离装置100结构合理性。进一
步地,参见图2所示,结合l型分隔件120的结构,且导入管130与排气管150位于壳体110的同一侧壁,可以延长流体混合物中在壳体110中运动距离,延长流体混合物在壳体110内部的运动时间,有利于水气分离。
54.根据本实用新型的一些实施例,水气分离装置100还包括水气分离风机,水气分离风机的进风端与排气管连通。壳体110内部空间为密闭空间,在水气分离机抽吸工作时,壳体110内气体持续地从排气管排出,从而壳体110内部空间形成负压,在大气压的作用下,流体混合物会持续不断地进入壳体110内进行水气分离,提高水气分离效率。
55.本实用新型实施例还提供一种清洗机器人,其包括如上所述的水气分离装置100。其中,水气分离装置100可以安装在清洗机器人内部,流体混合物经过水气分离装置100后,分离出来的液体可以重新被清洗机器人利用进行清洗。
56.清洗机器人清洗工作后的水,经回收装置回收后,再流向过滤装置,并在过滤装置内进行过滤,过滤后的流体混合物回到水气分离装置100后,实现水气分离,回收的水又重新被循环利用到清洗机器人下一个清洗动作。
57.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。