1.本发明涉及振动传送机械领域,尤其涉及一种自适应振动传送机械控制系统。
背景技术:
2.振动输送机械是利用激振器使料槽振动,从而使槽内物料沿一定方向滑行或抛移的连续输送机械。一般用于水平输送,生产率小于150t/h,输送距离小于80m,倾斜上运时,生产率随倾角增大而下降。除激振机构某些零部件外,相对转动部件很少,结构简单,可输送各种粒度的物料,能对灼热的、易燃易爆的、有毒的、多尘的物料实行封闭输送,在运送过程中可同时完成筛分、脱水和冷却等工艺操作。但不宜输送粘性物料。振动输送机械常用于化工和建材工厂。
3.一般地,振动输送机械借助振动作用连续输送物料的设备。可用于水平、缓倾斜或垂直运输(沿螺旋槽上升)各种松散物料。在输送过程中可同时完成筛分、干燥、脱水、冷却、混合等工艺。对粉尘多和含有害成分的物料还可用密封的槽体输送。其结构简单,功率消耗小。
4.在实际应用中,振动输送机械传送的物料尺寸不同,例如在传送石块这种特定的物料时,由于石块采集时的随机性,产生的石块大小不同,这时如果采用同一激振幅度对不同大小的石块执行振动式传输,则传输的效果不同,容易产生振动不力或者振动过度的场景,前者影响传输的效率,后者导致物料飞溅、电力资源浪费。
技术实现要素:
5.相比较于现有技术,本发明至少具有以下三处突出的实质性特点:
6.(1)引入包括蓝牙通信设备、激振器、承载槽、主振弹簧、槽体和机架的振动传送机械,用于为振动传送机械的自适应控制提供针对性设计的硬件资源;
7.(2)引入包括第一处理设备、第二处理设备、物料提取设备、径向检测设备、信息解析设备以及内容转换设备的智能化识别机制,实现对振动传送机械当前传送物料的主要尺寸的鉴别;
8.(3)基于鉴别结果实现对振动传送机械的激振力的自适应控制,从而使得振动传送机械的激振幅度与当前传送物料的主要尺寸相匹配。
9.根据本发明的一方面,提供了一种自适应振动传送机械控制系统,所述系统包括:
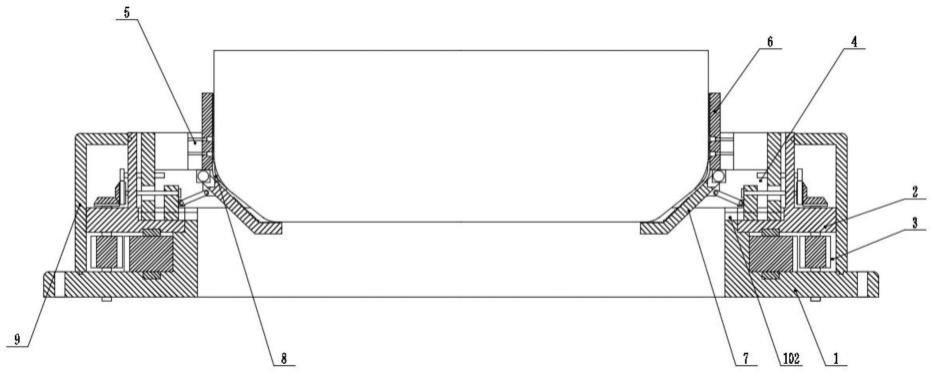
10.振动传送机械,包括蓝牙通信设备、激振器、承载槽、主振弹簧、槽体和机架,所述蓝牙通信设备与所述激振器连接,用于在所述激振器产生的激振力超限时,发出第一控制指令,还用于在所述激振器产生的激振力未超限时,发出第二控制指令,所述槽体、所述主振弹簧、所述承载槽以及所述激振器都设置在所述机架上,所述激振器与所述槽体连接,用于将产生的激振力作用于所述槽体,所述槽体在所述主振弹簧的约束下做定向强迫振动。当所述槽体向前振动时,依靠物料与槽体间的摩擦力把运动能量传递给物料,使物料加速运动,此时物料的运动方向与槽体的振动方向相同,当所述槽体向后振动时,物料因受惯性
作用,仍将继续向前运动,所述槽体则从物料下面往后运动,由于运动中阻力的作用,物料越过所述槽体的一段后又落回所述槽体上,当所述槽体再次向前振动时,物料又因受到加速而被输送向前;
11.鹰眼抓拍机构,设置在所述槽体的上方,用于对所述槽体的工作场景执行抓拍操作,以获得并输出对应的工作场景画面;
12.所述鹰眼抓拍机构包括蓝牙通信单元和实时抓拍单元,所述蓝牙通信单元与所述蓝牙通信设备连接,用于在接收到所述第一控制指令时,触发所述实时抓拍单元执行均匀时间间隔的连续抓拍操作;
13.第一处理设备,设置在所述机架上,与所述鹰眼抓拍机构连接,用于对接收到的工作场景画面执行几何校正处理,以获得对应的内容校正画面;
14.第二处理设备,与所述第一处理设备连接,用于对接收到的内容校正画面执行应用roberts算子的图像内容锐化处理,以获得对应的针对性锐化画面;
15.物料提取设备,与所述第二处理设备连接,用于基于物料的预设成像特征从所述针对性锐化画面中识别出各个物料对象分别对应的各个物料子画面;
16.径向检测设备,与所述物料提取设备连接,用于针对每一个物料子画面执行以下操作:获取所述物料子画面的几何形状对应的最小径向半径,所述物料子画面的几何形状为封闭的由所述物料子画面的边缘构成的形状;
17.信息解析设备,与所述径向检测设备连接,用于接收各个物料子画面分别对应的各个最小径向半径,将所述各个最小径向半径中出现次数最多的最小径向半径作为参考径向半径输出;
18.内容转换设备,分别与所述信息解析设备和所述激振器连接,用于确定与所述参考径向半径相关的激振力的数值,并将确定的激振力的数值发送给所述激振器以产生相应的激振力;
19.其中,确定与所述参考径向半径相关的激振力的数值包括:确定的相关的激振力的数值与所述参考径向半径呈现正相关的对应关系。
20.本发明的自适应振动传送机械控制系统操控智能、应用广泛。由于能够基于当前传送的物料的主要尺寸自适应调节激振器的激振幅度,从而提升了振动传送机械的智能化水准。
具体实施方式
21.下面将对本发明的自适应振动传送机械控制系统的实施方案进行详细说明。
22.普遍地,振动输送机械振动频率由激振电动机的转速决定。螺旋式垂直输送机同样可采用上述三种激振器,但要求产生垂直方向的激振力和绕垂直轴线的激振力矩,以实现螺旋槽体的垂直振动和绕轴线的扭摆振动,物料则沿螺旋槽连续向上输送。
23.激振力使槽体沿某一倾斜方向产生振动,将槽中的物料向前输送。物料在槽中的运动形式取决于槽体振动加速度的大小,此加速度在垂直槽底方向上的分量与重力加速度分量的比值(d)称为抛掷指数。当d<1时,物料在槽中作滑移运动,此时物料始终与槽底接触,每振动一次,物料向前滑动一个距离。当d>1时,物料作抛掷运动,此时物料在槽中跳跃前进,以连续跳跃实现连续输送。大多数振动输送机都选取抛掷运动状态,d值选取1.5~
3.3。
24.在实际应用中,振动输送机械传送的物料尺寸不同,例如在传送石块这种特定的物料时,由于石块采集时的随机性,产生的石块大小不同,这时如果采用同一激振幅度对不同大小的石块执行振动式传输,则传输的效果不同,容易产生振动不力或者振动过度的场景,前者影响传输的效率,后者导致物料飞溅、电力资源浪费。
25.为了克服上述不足,本发明搭建了一种自适应振动传送机械控制系统,能够有效解决相应的技术问题。
26.根据本发明实施方案示出的自适应振动传送机械控制系统包括:
27.振动传送机械,包括蓝牙通信设备、激振器、承载槽、主振弹簧、槽体和机架,所述蓝牙通信设备与所述激振器连接,用于在所述激振器产生的激振力超限时,发出第一控制指令,还用于在所述激振器产生的激振力未超限时,发出第二控制指令,所述槽体、所述主振弹簧、所述承载槽以及所述激振器都设置在所述机架上,所述激振器与所述槽体连接,用于将产生的激振力作用于所述槽体,所述槽体在所述主振弹簧的约束下做定向强迫振动。当所述槽体向前振动时,依靠物料与槽体间的摩擦力把运动能量传递给物料,使物料加速运动,此时物料的运动方向与槽体的振动方向相同,当所述槽体向后振动时,物料因受惯性作用,仍将继续向前运动,所述槽体则从物料下面往后运动,由于运动中阻力的作用,物料越过所述槽体的一段后又落回所述槽体上,当所述槽体再次向前振动时,物料又因受到加速而被输送向前;
28.鹰眼抓拍机构,设置在所述槽体的上方,用于对所述槽体的工作场景执行抓拍操作,以获得并输出对应的工作场景画面;
29.所述鹰眼抓拍机构包括蓝牙通信单元和实时抓拍单元,所述蓝牙通信单元与所述蓝牙通信设备连接,用于在接收到所述第一控制指令时,触发所述实时抓拍单元执行均匀时间间隔的连续抓拍操作;
30.第一处理设备,设置在所述机架上,与所述鹰眼抓拍机构连接,用于对接收到的工作场景画面执行几何校正处理,以获得对应的内容校正画面;
31.第二处理设备,与所述第一处理设备连接,用于对接收到的内容校正画面执行应用roberts算子的图像内容锐化处理,以获得对应的针对性锐化画面;
32.物料提取设备,与所述第二处理设备连接,用于基于物料的预设成像特征从所述针对性锐化画面中识别出各个物料对象分别对应的各个物料子画面;
33.径向检测设备,与所述物料提取设备连接,用于针对每一个物料子画面执行以下操作:获取所述物料子画面的几何形状对应的最小径向半径,所述物料子画面的几何形状为封闭的由所述物料子画面的边缘构成的形状;
34.信息解析设备,与所述径向检测设备连接,用于接收各个物料子画面分别对应的各个最小径向半径,将所述各个最小径向半径中出现次数最多的最小径向半径作为参考径向半径输出;
35.内容转换设备,分别与所述信息解析设备和所述激振器连接,用于确定与所述参考径向半径相关的激振力的数值,并将确定的激振力的数值发送给所述激振器以产生相应的激振力;
36.其中,确定与所述参考径向半径相关的激振力的数值包括:确定的相关的激振力
的数值与所述参考径向半径呈现正相关的对应关系。
37.接着,继续对本发明的自适应振动传送机械控制系统的具体结构进行进一步的说明。
38.在所述自适应振动传送机械控制系统中,还包括:
39.同步控制设备,分别与所述第一处理设备、所述第二处理设备、所述物料提取设备、所述径向检测设备、所述信息解析设备以及所述内容转换设备连接。
40.在所述自适应振动传送机械控制系统中:
41.所述同步控制设备用于实现所述第一处理设备、所述第二处理设备、所述物料提取设备、所述径向检测设备、所述信息解析设备以及所述内容转换设备各自的动作的相互同步。
42.在所述自适应振动传送机械控制系统中,还包括:
43.灰尘测量设备,包括多个灰尘测量单元,用于分别与所述第一处理设备、所述第二处理设备、所述物料提取设备、所述径向检测设备、所述信息解析设备以及所述内容转换设备连接。
44.在所述自适应振动传送机械控制系统中:
45.所述多个灰尘测量单元用于分别测量所述第一处理设备、所述第二处理设备、所述物料提取设备、所述径向检测设备、所述信息解析设备以及所述内容转换设备各自所在位置的实时灰尘浓度。
46.在所述自适应振动传送机械控制系统中,还包括:
47.实时报警机构,与所述多个灰尘测量单元连接,用于在所述第一处理设备、所述第二处理设备、所述物料提取设备、所述径向检测设备、所述信息解析设备以及所述内容转换设备存在至少一个设备对应的实时灰尘浓度超限时,执行相应的灰尘超标报警操作。
48.在所述自适应振动传送机械控制系统中:
49.所述蓝牙通信单元还用于在接收到所述第二控制指令时,中断所述实时抓拍单元执行的均匀时间间隔的连续抓拍操作。
50.在所述自适应振动传送机械控制系统中:
51.基于物料的预设成像特征从所述针对性锐化画面中识别出各个物料对象分别对应的各个物料子画面包括:所述物料的预设成像特征为所述物料的灰度值分布范围。
52.在所述自适应振动传送机械控制系统中:
53.基于物料的预设成像特征从所述针对性锐化画面中识别出各个物料对象分别对应的各个物料子画面包括:所述物料的预设成像特征为所述物料的颜色成像特征。
54.另外,对于振动传送机械,按参与振动构件数目可分为单质体、双质体和多质体三种类型。单质体的只有输送槽产生振动,因而振动力传至地基,大多为轻型的;双质体和多质体的除输送槽外,还有对重架参与振动,结构稍复杂,但可以基本上消除对地基的振动力,还可利用共振原理使所需激振力最小。
55.根据工作原理的不同,振动传送机械还可以分为以下几类:
56.(1)弹性连杆式。由偏心轴、连杆、连杆端部弹簧和料槽等组成。偏心轴旋转使连杆端部作往复运动,激起料槽作定向振动。促使槽内物料不断地向前移动。一般采用低频率、大振幅或中等频率与中等振幅。
57.(2)电磁式。由铁芯、线圈、衔铁和料槽等组成。整流后的电流通过线圈时,产生周期变化的电磁吸力,激起料槽产生振动。一般采用高频率、小振幅。
58.(3)惯性式。由偏心块、主轴、料槽等组成,偏心块旋转时产生的离心惯性力激起料槽振动。一般采用中等频率和振幅。
59.一般地,振动输送机械采用电动机作为优质振动源,使物料被抛起的同时向前运动,达到输送的目的;结构形式分为开启式、封闭式;输送形式可为槽式输送或管式输送,电机位置可上、下或侧面装侧。
60.尽管结合较佳实施例描述了本发明,然而可以理解,可以使用其它类似的实施例,或对所描述的实施例作出修改和添加,以执行本发明的相同的功能,而不脱离本发明。例如,尽管在仿真个人计算机的功能的数字设备的环境中描述了本发明的示例性实施例,然而本领域的技术人员将认识到,本发明不限于这类数字设备,如本技术中所描述的,本发明可应用于任意数量的现有或新兴计算设备或环境。因此,本发明不应当限于任何单个实施例,而是相反,应当依照所附权利要求书的广度和范围来解释。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。