1.本公开涉及一种停车管理系统,其中,当车辆进入停车空间时,进入的车辆被识别并与引导机器人匹配,引导机器人在匹配的车辆前方行驶,并且车辆通过与引导机器人通信而移动至用于停车的分配的停车区域。
背景技术:
2.在常规停车场的情况下,驾驶员通常在停车场中驾驶他或她的车辆的同时寻找停车区域,并且在找到的停车区域中直接停车,或者可替换地利用代客泊车。
3.另一方面,由于近年来技术的发展,已经提供了无人驾驶停车系统或自动停车系统的概念。例如,这样的自动停车系统可以通过使得服务器直接控制进入停车场的车辆以通过自主驾驶将车辆停在停车区域中,或通过在不驾驶的情况下抬升和移动车辆,或使用传送带,来实施。
4.然而,从不同型号的多种车辆的直接控制方面来看,上述方法可能是有问题的,可能不能停放未由服务器控制的车辆,和/或可能产生与车辆安全相关的问题。此外,在没有驾驶的情况下直接移动车辆的方法需要在现有停车场中进行大规模设施建设,并且预期在设施故障时将消耗时间和费用进行维修。
5.因此,需要开发一种停车管理系统,该系统可容易地在现有停车场中采用并且在自主停车系统中使用而无需直接控制车辆。
6.包括在本公开的该背景部分中的信息仅用于增强对本公开的一般背景的理解,并且可不被视为承认或以任何形式建议该信息形成本领域技术人员已知的现有技术。
技术实现要素:
7.本公开的各个方面旨在提供一种停车管理系统,当车辆进入停车空间时,该系统使得管理服务器能够识别进入的车辆并将所识别的车辆与引导机器人匹配,控制所述引导机器人在所述匹配的车辆前方行驶,并且使所述车辆与所述引导机器人通信,使得所述车辆通过跟随所述引导机器人移动到分配的停车区域,从而所述车辆通过跟随所述引导机器人、自动地或者通过驾驶员的操作手动地、甚至在没有与所述管理服务器的单独通信的情况下,被停放在所分配的停车区域中。
8.根据本公开的一方面,上述和其他目的可通过提供一种停车管理系统来实现,该停车管理系统包括:引导机器人,布置在设置有多个停车区域的停车空间中,所述引导机器人被配置为与进入所述停车空间的车辆匹配,并且在所述匹配的车辆前方行驶以将所述匹配的车辆引导至分配的停车区域;以及管理服务器,被配置为识别进入停车空间的车辆,将识别的车辆与引导机器人匹配,以监测停车空间以识别每个停车区域的停车状态,基于所识别的停车状态将停车区域分配给匹配的车辆,并且控制所述引导机器人行驶至所分配的停车区域。
9.引导机器人可包括布置在停车空间的入口处的一个或多个引导机器人,并且每个
引导机器人可在行驶时位于匹配的车辆的前方并且可在完成其引导操作之后返回至停车空间的入口。
10.当引导机器人引导匹配的车辆时,引导机器人之后可以是车辆的智能巡航控制功能,以将车辆驱动至分配的停车区域。
11.当引导机器人到达分配给匹配的车辆的停车区域的前方时,引导机器人可以使车辆使用自主停车功能在分配的停车区域中停车。
12.当引导机器人与进入停车空间的车辆匹配时,引导机器人可以以包括蓝牙的方式与匹配的车辆通信。
13.管理服务器可使用设置在停车空间入口处的识别单元来识别进入停车空间的车辆,并且识别单元可使用包括相机的检测器来识别进入的车辆。
14.管理服务器可以设置从停车空间入口至分配给识别的车辆的停车区域的行驶路线,并且可以控制引导机器人沿着设置的行驶路线行驶。
15.所述引导机器人可以包括多个引导机器人,并且当所述多个引导机器人彼此面对时,所述管理服务器可以确定所述引导机器人之间的操作的优先级,并且可以根据所确定的优先级来控制被驱动的每个引导机器人。
16.当多个引导机器人彼此面对时,管理服务器可以考虑每个引导机器人的位置、与每个引导机器人匹配的车辆的位置、或每个引导机器人的行驶路线来确定操作的优先级。
17.在引导机器人的引导完成之后,管理服务器可以向匹配的车辆的用户终端提供与引导的车辆的状态或停车区域有关的信息。
18.当管理服务器从用户终端接收到用于被引导至停车区域的停放的车辆的离开的请求时,管理服务器可以将引导机器人与停放的车辆匹配,并且可以控制引导机器人在停放的车辆前方行驶并且将车辆引导至停车空间入口,由此停放的车辆离开停车空间入口。
19.本公开的方法和装置具有其他特征和优点,这些特征和优点将从并入本文的附图和下面的具体实施方式中显而易见或在其中更详细地阐述,这些附图和下面的具体实施方式一起用于解释本公开的某些原理。
附图说明
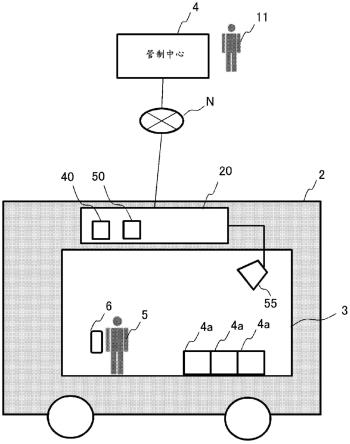
20.图1是示意性地示出了根据本公开示例性实施方式的停车管理系统的示图;
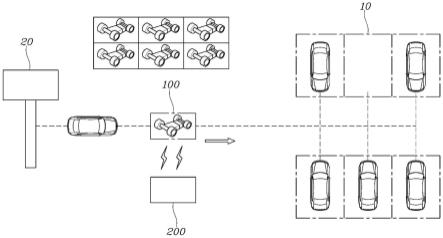
21.图2是示意性地示出了根据本公开示例性实施方式的停车管理系统中的停车空间和停车区域的示图;
22.图3、图4和图5是示出根据本公开示例性实施方式的停车管理系统中用于图2的每种区域类型的多个引导机器人彼此面对的情况的示图;并且
23.图6是示意性地示出根据本公开示例性实施方式的停车管理系统中车辆进入和车辆离开停车区域的场景的示图。
24.图7是在区域类型1和2的情况下确定优先级所使用的逻辑。
25.图8是在区域类型3的情况下确定优先级所使用的逻辑。
26.图9是在区域类型4的情况下确定优先级所使用的逻辑。
27.可以理解的是,附图不一定按比例绘制,其呈现了说明本公开的基本原理的各种特征的稍微简化的表示。如本文所公开的本公开的具体设计特征(包括例如具体尺寸、方
位、位置和形状)将部分地由具体预期的应用和使用环境来确定。
28.在附图中,贯穿附图的几幅图,参考标号指代本公开的相同或等效部件。
具体实施方式
29.现在将详细参考本公开的各种实施方式,其示例在附图中示出并在以下描述。尽管将结合本公开的示例性实施方式对本公开进行描述,但应当理解,本说明书并不旨在将本公开限于本公开的那些示例性实施方式。另一方面,本公开旨在不仅覆盖本公开的示例性实施方式,而且覆盖可包括在由所附权利要求限定的本公开的精神和范围内的各种替换、修改、等同物以及其他实施方式。
30.图1是示意性地示出了根据本公开各种示例性实施方式的停车管理系统的示图。图2是示意性地示出了根据本公开示例性实施方式的停车管理系统中的停车空间和停车区域的示图。图3、图4和图5是示出根据本公开示例性实施方式的停车管理系统中用于图2的每种区域类型的多个引导机器人彼此面对的情况的示图。图6是示意性地示出根据本公开示例性实施方式的停车管理系统中车辆进入停车区域和离开停车区域的场景的示图。
31.根据本公开各种示例性实施方式的管理服务器200可使用处理器、或者非易失性存储器来实施,该处理器被配置为使用被配置为控制车辆的各种部件的操作的算法来执行下面所描述的操作,该非易失性存储器被配置为存储与用于再现算法与存储在该存储器中的数据的软件指令相关的数据并且。这里,存储器和处理器可以实现为单独的芯片。可替换地,存储器和处理器可以实现为彼此集成的单个芯片。处理器也可以是一个或多个处理器的形式。
32.图1是示意性地示出了根据本公开示例性实施方式的停车管理系统的示图。根据本公开示例性实施方式的停车管理系统包括:引导机器人100,布置在设置有多个停车区域10的停车空间中,引导机器人100被配置为与进入停车空间的车辆匹配并且在匹配的车辆前方行驶以将匹配的车辆引导至分配的停车区域10;以及管理服务器200,被配置为识别进入停车空间的车辆,将识别的车辆与引导机器人100匹配,以监测停车空间以识别每个停车区域10的停车状态,基于识别的停车状态将停车区域10分配给匹配的车辆,并且控制引导机器人100驱动到所分配的停车区域10。
33.在根据本公开示例性实施方式的停车管理系统中,引导机器人100可包括设置在停车空间的入口处的一个或多个引导机器人。每个引导机器人100可在行驶时位于匹配的车辆的前方,并且可在完成其引导操作之后返回至停车空间的入口。即,在根据本公开示例性实施方式的停车管理系统中,管理服务器200监测每个停车区域10并且控制引导机器人100而不直接控制车辆,并且允许内置于车辆中的自主驾驶功能跟踪引导机器人100。因此,停车管理系统可简单地设置在常规停车场中,而无需直接控制车辆或与车辆通信,从而使车辆停车管理自动化。
34.此外,在根据本公开示例性实施方式的停车管理系统中,当引导机器人100引导匹配的车辆时,引导机器人100之后可以是车辆的智能巡航控制功能(scc),以将车辆驱动至分配的停车区域。
35.此外,在根据本公开示范性实施方式的停车管理系统中,当引导机器人100到达分配给匹配的车辆的停车区域10的前方时,引导机器人100可以使车辆使用自主停车功能在
分配的停车区域10中停车。
36.此外,在根据本公开示例性实施方式的停车管理系统中,当引导机器人100与进入停车空间的车辆匹配时,引导机器人100可以以包括蓝牙的方式与匹配的车辆通信。
37.以这种方式,引导机器人100在管理服务器200的控制下在停车空间中行驶,并且简单地经由蓝牙等与车辆通信。因此,通过使用车辆的智能巡航控制功能和自主停车功能跟随引导机器人100,车辆可以到达分配的用于停车的停车区域。当车辆不具有智能巡航控制功能和/或自主停车功能时,驾驶员可以通过在继续乘坐车辆的同时跟随引导机器人100手动地到达用于直接停车的停车区域,并且可以亲自停放车辆。因此,预期在将停车管理系统应用于传统停车场中的各种型号的车辆时没有问题。
38.同时,在根据本公开示例性实施方式的停车管理系统中,管理服务器200可以使用设置在停车空间的入口处的识别单元20识别进入停车空间的车辆,并且识别单元20可以使用包括相机的检测器识别进入的车辆。识别单元20可使用诸如相机的检测器识别车辆的牌照以将车辆信息发送至管理服务器200,并且可通过升高或者降低阻挡杆允许识别的车辆进入停车空间。
39.在本公开的示例性实施方式中,识别单元20可由处理器实现。
40.图2是示意性地示出了根据本公开示例性实施方式的停车管理系统中的停车空间和停车区域的示图。图3、图4和图5是示出在根据本公开示例性实施方式的停车管理系统中用于图2的每种区域类型的多个引导机器人彼此面对的情况的示图。在根据本公开示例性实施方式的停车管理系统中,管理服务器200可以设置从停车空间入口至分配给识别的车辆的停车区域10的行驶路线,并且可以控制引导机器人100沿着设置的行驶路线行驶。
41.即,管理服务器200识别停车空间的停车区域10是否为空,并且当车辆进入时,将空的停车区域10分配给该车辆。在分配之后,管理服务器200考虑其他移动的引导机器人100的位置或跟随相应引导机器人100的车辆的位置、车辆进入和离开的频率、停车场的拥挤度等,设置从停车空间入口到分配的停车区域10的最佳行驶路线。
42.此外,在根据本公开示例性实施方式的停车管理系统中,引导机器人100可以包括多个引导机器人。当引导机器人100彼此面对时,管理服务器200可以确定引导机器人100之间的操作的优先级,并且可以根据所确定的优先级来控制驱动每个引导机器人100。
43.更详细地,在根据本公开示例性实施方式的停车管理系统中,当引导机器人100彼此面对时,管理服务器200可以考虑每个引导机器人100的位置、与每个引导机器人100匹配的车辆的位置、或每个引导机器人100的行驶路线,来确定操作的优先级。
44.即,参考图2的每个区域类型,当多个引导机器人100在狭窄的停车场中彼此面对时,有必要对有多少空间被分配给每个引导机器人100进行优先级排序。
45.在区域类型1和2的情况下,由于靠近墙壁的引导机器人100和车辆没有足够的空间来退避,所以需要远离墙壁的引导机器人100和车辆腾出空间,或者需要使靠近墙壁的引导机器人100和车辆优先,使得它们可以首先行进。参照图3,在区域类型1和2的情况下,优先级由以下等式和图7所示的逻辑确定:
46.x1=x
b1
r1
x
(f-间隙),
47.y1=y
b1
r1y,
48.x2=x
b1
r2
x
,
49.y2=y
b1
r2y,
50.o
x
=x1 (x
2-x1)/2,
51.oy=y1 (y
2-y1)/2,
52.x2=x
b1
r2
x
=x1 2o
x
,
[0053]vctr
=车辆中心,
[0054]rctr
=机器人中心=v
ctr
。
[0055]
在多个引导机器人100中的一个进入角落的区域类型3的情况下,必须确定优先级,使得旋转引导机器人100被优先为从拐角离开。参照图4,在区域类型3的情况下,优先级由以下等式和图8所示的逻辑确定:
[0056]
r=α
·
(r w),
[0057]
l=α
·
r,
[0058][0059][0060][0061]
如果r=l,例如,如果机器人运动是直线的,则状态参数如下:
[0062]
θ
′
=θ,
[0063][0064]
在多个引导机器人100在进入拐角之前彼此面对的区域类型4的情况下,必须确定优先级,使得更靠近拐角的引导机器人100优先从拐角离开。参考图5,在区域类型4的情况下,优先级由图9所示的逻辑确定。
[0065]
同时,除了如上所述的引导机器人100或车辆之间的优先级排序之外,还需要建立在停车空间中行走的行人、不依赖于任何引导机器人100的车辆、由相应的引导机器人100引导的车辆以及引导机器人100之间的优先级。即,行人的安全在停车空间中应是最重要的。因此,行人应为最高优先级,且其他将必须停止直到行人经过为止。不依赖于引导机器人100的车辆将是下一个优先级。例如,这些车辆是由驾驶员驾驶或停放的车辆或者完全自主的车辆。这是因为车辆没有由管理服务器200管理,并且管理服务器200不监控它们如何移动。接下来,通过引导机器人100引导的用户的车辆以及最后的引导机器人100将依序具有优先级。
[0066]
此外,在根据本公开示例性实施方式的停车管理系统中,在完成每个引导机器人100的引导之后,管理服务器200可以向匹配的车辆的用户终端提供与被引导车辆的状态或停车区域10相关的信息。
[0067]
此外,在根据本公开示例性实施方式的停车管理系统中,当管理服务器200从用户终端接收用于引导至停车区域10的停放的车辆的离开的请求时,管理服务器200可以将引导机器人100与停放的车辆匹配,并且可以控制引导机器人100在停放的车辆前方行驶并且引导车辆至停车空间的入口,由此停放的车辆可以离开。
[0068]
此外,停车管理系统可以通过在诸如引导机器人100的进入和离开的服务方面给予优先级来平滑地实现。已经引导进入的车辆的引导机器人100必须快速返回到停车空间的入口,然后等待。因此,已经执行引导机器人100的引导的引导机器人100将具有最高优先级,将进入的车辆引导到停车区域10和将离开的车辆引导到停车空间的入口将具有接下来的优先级,并且将被引导到停车区域10的车辆停放在停车区域10中,将最后被优先级排序。
[0069]
图6是示意性地示出在根据本公开示例性实施方式的停车管理系统中车辆进入和离开停车区域的场景的示图。根据本公开示例性实施方式的停车管理系统通过使用车辆的scc功能和自主停车功能与停车场中的无人驾驶引导机器人100进行通信并且对引导机器人100进行图像识别,来实现无人代客停车功能。停车管理系统的示意场景如下:
[0070]
在停车场的入口处识别车辆号码,并且管理服务器200将车辆信息发送到引导机器人100;
[0071]
引导机器人100根据管理服务器200检查停车场中的空的空间,并且试图利用接收的车辆信息与待引导的车辆通信以进行认证;
[0072]
当车辆已经通过与引导机器人100的通信被认证时,车辆使用其前相机识别引导机器人100;
[0073]
在完成识别之后,引导机器人100移动到先前检查的停车区域10;
[0074]
车辆跟随引导机器人100,同时利用其高级驾驶员辅助系统驱动(adas_drv)控制器、前置相机和雷达识别周围情况;
[0075]
当到达停车位置时,车辆借助于其高级驾驶员辅助系统停车区(adas_prk)控制器使用相机和超声检测器而被停放在空的停车区域10中;
[0076]
当车辆已经被停放时,从引导机器人100接收的停车位置信息和由周围视野监测器(svm)相机捕获的车辆周围的图像,通过h/unit被传输到该车辆所有者的移动设备;
[0077]
当从车辆接收停车完成信息时,引导机器人100移动到原始等待地点;以及
[0078]
管理服务器200更新停车空间。
[0079]
如从以上描述中显而易见的,根据本公开的停车管理系统,当车辆进入停车空间时,管理服务器识别进入的车辆,将识别的车辆与引导机器人匹配,控制引导机器人在匹配的车辆前面驾驶,并且使车辆与引导机器人通信,使得车辆通过跟随引导机器人移动到分配的停车区域。因此,即使在没有与管理服务器的单独通信的情况下,车辆也可以通过跟随引导机器人自动地或者通过驾驶员的操作手动地停放在分配的停车区域中。
[0080]
尽管出于说明性的目的已经公开了本公开的具体实施方式,但本领域技术人员将认识到,在不背离所附权利要求中公开的本公开的范围和精神的情况下,各种修改、添加和替换是可行的。
[0081]
为了便于说明并准确限定所附权利要求,参考附图中显示的此类特征的位置,使用术语“上部”、“下部”、“内”、“外”、“上”、“下”、“向上”、“向下”、“前”、“后”、“向后”、“内部”、“外部”、“向内”、“向外”、“内”、“外”、“内部的”、“外部的”、“向前”和“向后”来描述示例性实施方式的特征。应进一步理解,术语“连接”或其衍生物是指直接连接和间接连接。
[0082]
出于说明和描述的目的,已经呈现了本公开的具体示例性实施方式的前述描述。它们不旨在是详尽的或将本公开限于所公开的精确形式,并且显然根据上述教导,许多修改和变化是可行的。选择并描述示例性实施方式以解释本公开的某些原理及其实际应用,
从而使本领域的其他技术人员能够做出并且利用本公开的各种示例性实施方式及其各种替换和修改。本公开的范围旨在由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。