1.本实用新型属于路面机械设备技术领域,具体涉及一种摊铺机料斗防撞预警系统。
背景技术:
2.在修筑公路时,无论是路基还是路面均需使用沥青混凝土摊铺机,它可以高效平整的完成路面摊铺。摊铺作业时,由摊铺机料斗接收来自物料运输车的物料,经过刮板输送到布料仓内,再经过布料器把物料分开到路面上,最后由熨平板完成铺路。这其中第一步摊铺机料斗平稳的接收来自物料运输车的物料最为关键,通常工作的顺序是物料运输车倒车将物料运输车车斗对准摊铺机料斗,再倒入物料。
3.倒车时,物料运输车驾驶司机通常难以掌握物料运输车与摊铺机料斗之间的距离远近,在实际施工现场,经常发生物料运输车驾驶司机误以为物料运输车距离摊铺机料斗很远,故驾驶倒车车速过快或者倒车注意力不集中而导致物料运输车倒车撞坏料斗造成摊铺机停工,影响摊铺作业的问题。
技术实现要素:
4.针对现有技术中存在的问题,本实用新型提供了一种摊铺机料斗防撞预警系统,摊铺机料斗在接收卡车物料时,能够给物料运输车驾驶司机进行预警,避免摊铺机料斗被物料运输车车厢撞坏带来的摊铺机停工问题。
5.为了解决上述技术问题,本实用新型通过以下技术方案予以实现:
6.一种摊铺机料斗防撞预警系统,包括控制器、设置在摊铺机料斗入口两侧端部的雷达传感器、正对设置在摊铺机料斗入口两侧内壁的光幕传感器和设置在摊铺机主机上的蜂鸣器,所述控制器分别与所述雷达传感器、所述光幕传感器和所述蜂鸣器连接;
7.所述雷达传感器用于检测物料运输车是否进入预设预警距离;
8.所述光幕传感器用于检测物料运输车是否进入摊铺机料斗入口;
9.所述控制器用于根据所述雷达传感器的检测信号和所述光幕传感器的检测信号控制所述蜂鸣器是否蜂鸣。
10.进一步地,当所述雷达传感器检测到物料运输车料斗进入预设预警距离时,所述控制器控制所述蜂鸣器蜂鸣,且当所述光幕传感器检测到物料运输车料斗进入摊铺机料斗入口时,所述控制器控制所述蜂鸣器停止蜂鸣。
11.进一步地,当所述雷达传感器检测到物料运输车距离越近时,所述控制器控制所述蜂鸣器蜂鸣声越大或越急促。
12.进一步地,还包括设置在所述摊铺机主机上的警示灯,所述控制器与所述警示灯连接;
13.所述控制器还用于根据所述雷达传感器的检测信号和所述光幕传感器的检测信号控制所述警示灯是否闪烁。
14.进一步地,当所述雷达传感器检测到物料运输车料斗进入预设预警距离时,所述控制器控制所述警示灯闪烁,且当所述光幕传感器检测到物料运输车料斗进入摊铺机料斗入口时,所述控制器控制所述警示灯停止闪烁。
15.进一步地,所述控制器为摊铺机plc。
16.进一步地,所述雷达传感器的型号为ce100812雷达传感器。
17.进一步地,所述光幕传感器的型号为weco-917a41dc24h光幕传感器。
18.与现有技术相比,本实用新型至少具有以下有益效果:本实用新型提供的一种摊铺机料斗防撞预警系统,通过在摊铺机料斗入口两侧端部安装雷达传感器、在摊铺机料斗入口两侧内壁安装光幕传感器以及在摊铺机主机上安装蜂鸣器,利用控制器控制雷达传感器、光幕传感器和蜂鸣器之间协同作用,有效的实现了物料运输车的倒车预警。详细的说,当雷达传感器未检测到物料运输车料斗进入预设预警距离时,则说明物料运输车距离摊铺机料斗相对比较远,无需预警。当雷达传感器检测到物料运输车料斗进入预设预警距离时,控制器控制蜂鸣器蜂鸣,进行倒车预警,此时,驾驶司机在听到蜂鸣器蜂鸣预警信号后,则会减速且集中注意力倒车,且当光幕传感器检测到物料运输车料斗进入摊铺机料斗入口时,控制器控制蜂鸣器停止蜂鸣,此时,说明物料运输车倒进摊铺机料斗入口。可见,本实用新型有效的解决了因倒车时物料运输车驾驶司机难以掌握物料运输车与摊铺机料斗之间的距离远近,而导致物料运输车倒车撞坏料斗造成摊铺机停工,影响摊铺作业的问题。
19.进一步地,当雷达传感器检测到物料运输车距离越近时,控制器控制蜂鸣器蜂鸣声越大或越急促,能够更好的提醒驾驶司机注意倒车驾驶,避免物料运输车撞到摊铺机料斗。
20.进一步地,本实用新型在摊铺机主机上加装了警示灯,当雷达传感器检测到物料运输车料斗进入预设预警距离时,控制器控制警示灯闪烁,进行倒车预警,此时,物料运输车驾驶司机通过后视镜观察到警示灯闪烁后,则会减速且集中注意力倒车,且当光幕传感器检测到物料运输车料斗进入摊铺机料斗入口时,控制器控制警示灯停止闪烁,此时,说明物料运输车倒进摊铺机料斗入口。警示灯配合蜂鸣器能够更好的实现预警作用,避免了因驾驶司机因工况嘈杂没有听到蜂鸣声而导致撞到摊铺机料斗。
21.进一步地,控制器为摊铺机plc,利用摊铺机plc进行信号处理,无需增加额外的控制器,成本低,可靠性高。
22.为使本实用新型的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
23.为了更清楚地说明本实用新型具体实施方式中的技术方案,下面将对具体实施方式描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
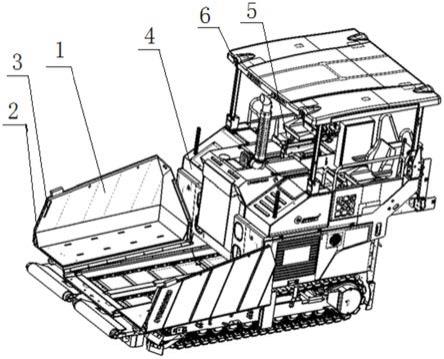
24.图1为本实用新型一种摊铺机料斗防撞预警系统的结构示意图;
25.图2为图1中的局部放大结构示意图;
26.图3为物料运输车未完全倒入摊铺机料斗内的正侧视图示意图;
27.图4为物料运输车完全倒入摊铺机料斗内的正侧视图示意图;
28.图5为物料运输车完全倒入摊铺机料斗内的俯视图示意图。
29.图中:1-摊铺机料斗;2-雷达传感器;3-光幕传感器;4-摊铺机主机;5-蜂鸣器;6-警示灯;7-物料运输车料斗。
具体实施方式
30.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.作为本实用新型的某一具体实施方式,结合图1和图2所示,一种摊铺机料斗防撞预警系统,包括控制器、设置在摊铺机料斗1入口两侧端部的雷达传感器2、正对设置在摊铺机料斗1入口两侧内壁的光幕传感器3和设置在摊铺机主机4上的蜂鸣器5,控制器分别与雷达传感器2、光幕传感器3和蜂鸣器5连接。本实施例中,控制器直接利用摊铺机plc,雷达传感器2采用dearroad品牌的ce100812雷达传感器,光幕传感器3采用微科品牌的weco-917a41dc24h光幕传感器。
32.蜂鸣器5用于蜂鸣预警。
33.雷达传感器2用于检测物料运输车是否进入预设预警距离。
34.光幕传感器3用于检测物料运输车是否进入摊铺机料斗1入口。
35.控制器用于根据雷达传感器2的检测信号和光幕传感器3的检测信号控制蜂鸣器5是否蜂鸣。
36.具体地说,如图3至图5所示,当雷达传感器2未检测到物料运输车料斗7进入预设预警距离时,则说明物料运输车距离摊铺机料斗相对比较远,无需预警。当雷达传感器2检测到物料运输车料斗7进入预设预警距离时,控制器控制蜂鸣器5蜂鸣,进行倒车预警,此时,驾驶司机在听到蜂鸣器5蜂鸣预警信号后,则会减速且集中注意力倒车,且当光幕传感器3检测到物料运输车料斗7进入摊铺机料斗1入口时,控制器控制蜂鸣器5停止蜂鸣、雷达传感器2信号自动关闭,此时,说明物料运输车倒进摊铺机料斗入口。
37.优选的,当雷达传感器2检测到物料运输车距离越近时,控制器控制蜂鸣器5蜂鸣声越大或越急促,更好的提醒驾驶司机注意驾驶倒车,避免相撞。
38.作为更加优选的实施方式,摊铺机料斗防撞预警系统还包括设置在摊铺机主机4上的警示灯6,控制器与警示灯6连接。
39.警示灯6用于闪烁预警。
40.控制器还用于根据雷达传感器2的检测信号和光幕传感器3的检测信号控制警示灯6是否闪烁。
41.具体地说,当雷达传感器2未检测到物料运输车料斗7进入预设预警距离时,则说明物料运输车距离摊铺机料斗相对比较远,无需预警。当雷达传感器2检测到物料运输车料斗7进入预设预警距离时,控制器控制警示灯6闪烁,进行倒车预警,此时,物料运输车驾驶司机通过后视镜观察到警示灯6闪烁后,则会减速且集中注意力倒车,且当光幕传感器3检测到物料运输车料斗7进入摊铺机料斗1入口时,控制器控制警示灯6停止闪烁,此时,说明
物料运输车倒进摊铺机料斗入口。
42.最后应说明的是:以上所述实施例,仅为本实用新型的具体实施方式,用以说明本实用新型的技术方案,而非对其限制,本实用新型的保护范围并不局限于此,尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的精神和范围,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。