1.本公开涉及信息处理装置、信息处理方法以及非临时性的存储介质。
背景技术:
2.在专利文献1中,公开了一种向多个配送地配送货物的车辆。专利文献1公开的车辆储存有将货物从目的地配送至配送地的移动体。而且,车辆根据多个配送地的分散程度,设定一个或者多个目的地。而且,车辆从当前位置依次驶向所设定的一个或者多个目的地。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2020-128287号公报
技术实现要素:
6.本公开的目的在于提供一种能够高效地配送货物的技术。
7.本公开的第1方案提供一种信息处理装置,包括控制部,该控制部执行:
8.根据与配送货物的多个配送目的地的位置有关的位置信息,决定通过车辆配送货物的一个或者多个第1配送目的地、通过搭载于所述车辆的无人机配送货物的一个或者多个第2配送目的地、包括所述车辆将货物配送到所述一个或者多个第1配送目的地的路径的行驶路径、所述无人机开始从所述车辆向所述一个或者多个第2配送目的地飞行的所述行驶路径上的第1地点以及所述无人机回到所述车辆的所述行驶路径上的第2地点。
9.本公开的第2方案提供一种信息处理方法,由计算机执行,所述信息处理方法包括:
10.根据与配送货物的多个配送目的地的位置有关的位置信息,决定通过车辆配送货物的一个或者多个第1配送目的地、通过搭载于所述车辆的无人机配送货物的一个或者多个第2配送目的地、包括所述车辆将货物配送到所述一个或者多个第1配送目的地的路径的行驶路径、所述无人机开始从所述车辆向所述一个或者多个第2配送目的地飞行的所述行驶路径上的第1地点以及所述无人机回到所述车辆的所述行驶路径上的第2地点。
11.本公开的第3方案提供一种非临时性的存储介质,存储有用于使计算机执行信息处理方法的程序,其中,所述信息处理方法包括:
12.根据与配送货物的多个配送目的地的位置有关的位置信息,决定通过车辆配送货物的一个或者多个第1配送目的地、通过搭载于所述车辆的无人机配送货物的一个或者多个第2配送目的地、包括所述车辆将货物配送到所述一个或者多个第1配送目的地的路径的行驶路径、所述无人机开始从所述车辆向所述一个或者多个第2配送目的地飞行的所述行驶路径上的第1地点以及所述无人机回到所述车辆的所述行驶路径上的第2地点。
13.通过本公开,能够高效地配送货物。
附图说明
14.图1是示出管理系统的概略结构的图。
15.图2是示出通过车辆和无人机配送货物的概要的图。
16.图3是概略地示出管理服务器的功能结构的一个例子的框图。
17.图4是示出配送目的地信息的表格结构的一个例子的图。
18.图5是示出在第1实施方式中由管理服务器决定的行驶路径、飞行开始地点以及归航地点的一个例子的图。
19.图6是决定处理的流程图。
20.图7是示出在第2实施方式中由管理服务器决定的行驶路径、飞行开始地点以及归航地点的一个例子的图。
21.(符号说明)
22.1:管理系统;100:车辆;200:无人机;300:管理服务器;301:控制部;302:通信部;303:配送目的地信息db;304:地图信息db;310:处理器;320:主存储部;330:辅助存储部;340:通信i/f。
具体实施方式
23.本公开的第1方案所涉及的信息处理装置是管理货物的配送的信息处理装置。在此,货物的配送通过车辆和搭载于车辆的无人机进行。搭载于车辆的无人机搭载货物并从车辆起飞,从而进行货物的配送。本公开的第1方案所涉及的信息处理装置中的控制部根据与多个配送目的地的位置有关的位置信息,决定一个或者多个第1配送目的地和一个或者多个第2配送目的地。在此,第1配送目的地是多个配送目的地中的、通过车辆配送货物的配送目的地。另外,第2配送目的地是多个配送目的地中的、通过搭载于车辆的无人机配送货物的配送目的地。
24.另外,信息处理装置中的控制部决定行驶路径、第1地点以及第2地点。在此,行驶路径是包括车辆向一个或者多个第1配送目的地配送货物的路径的路径。另外,第1地点是无人机开始从车辆向一个或者多个第2配送目的地飞行的行驶路径上的地点。另外,第2地点是无人机回到车辆的行驶路径上的地点。这样,通过由控制部决定第1地点,无人机开始从车辆向一个或者多个第2配送目的地飞行。另外,车辆沿着行驶路径行驶。而且,无人机能够在归航地点回到车辆。
25.如以上说明,信息处理装置根据位置信息而决定一个或者多个第1配送目的地和一个或者多个第2配送目的地。另外,信息处理装置决定行驶路径、第1地点以及第2地点。由此,能够通过车辆将货物配送到存在于适合利用车辆配送的位置的配送目的地。另外,能够通过无人机将货物配送到存在于适合利用无人机配送的位置的配送目的地。这样,利用信息处理装置,能够高效地进行货物的配送。
26.以下,根据附图,说明本公开的具体的实施方式。本实施方式记载的结构部件的尺寸、材质、形状及其相对配置等,只要没有特别记载,则本公开的技术的范围不限定于这些。
27.《第1实施方式》
28.(系统的概略)
29.根据图1,说明本实施方式中的管理系统1。图1是示出管理系统1的概略结构的图。
管理系统1构成为包括车辆100、无人机200以及管理服务器300。在管理系统1中,车辆100、无人机200以及管理服务器300通过网络n1相互连接。作为网络n1,例如,也可以采用因特网等作为世界规模的公共通信网的wan(wide area network,广域网)、或者便携电话等的电话通信网。
30.(车辆)
31.车辆100是被用于配送货物的车辆。车辆100行驶至配送目的地的附近。而且,通过车辆100的搭乘人员将货物搬运到配送目的地,从而将货物配送到配送目的地。此外,进行货物配送的方法也可以是车辆100行驶至配送目的地的附近,车辆100的搭乘人员将货物搬运到配送目的地的方法以外的方法。例如,也可以车辆100直接自主行驶至配送目的地,将装载于车辆100的货物配送到配送目的地。在该情况下,在货物的配送目的地是建筑物的内部的情况下,车辆100在建筑物的内部自主行驶,将货物配送至配送目的地。
32.(无人机)
33.无人机200是被用于配送货物的无人机。另外,无人机200是搭载于车辆100的无人机。无人机200搭载货物而从车辆100向货物的配送目的地飞行。这样,无人机200将货物配送到配送目的地。
34.图2是示出通过车辆100和无人机200配送货物的概要的图。如图2所示,无人机200搭载于车辆100。无人机200为了配送货物,开始从车辆100向货物的配送目的地飞行。而且,无人机200在货物的配送结束后,回到车辆100。另一方面,如图2所示,车辆100为了配送货物而移动。因此,无人机200从车辆100起飞的地点和用于无人机200回到车辆100的地点也可以是不同的地点。车辆100和无人机200的货物配送的详细情况后述。
35.(管理服务器)
36.管理服务器300是对通过车辆100和无人机200进行的货物配送进行管理的服务器。管理服务器300构成为包括计算机,该计算机具有处理器310、主存储部320、辅助存储部330以及通信接口(通信i/f)340。处理器310例如是cpu(central processing unit,中央处理单元)或者dsp(digital signal processor,数字信号处理器)。主存储部320例如是ram(random access memory,随机存取存储器)。辅助存储部330例如是rom(read only memory,只读存储器)。另外,辅助存储部330例如是诸如hdd(hard disk drive,硬盘驱动器)、或者cd-rom、dvd盘、或者蓝光盘的盘记录介质。另外,辅助存储部330也可以是可移动介质(便携式存储介质)。在此,作为可移动介质,例如,例示usb存储器或者sd卡。通信i/f340例如是lan(local area network,局域网)接口板、或者用于无线通信的无线通信电路。
37.在管理服务器300中,在辅助存储部330中储存有操作系统(os)、各种程序以及各种信息表格等。另外,在管理服务器300中,处理器310将存储于辅助存储部330的程序载入到主存储部320并执行,从而能够实现如后述的各种功能。其中,管理服务器300中的一部分或者全部的功能也可以通过如asic或者fpga的硬件电路实现。此外,管理服务器300无需一定通过单一的物理结构实现,也可以通过相互协作的多台计算机构成。此外,车辆100以及无人机200也与管理服务器300同样地构成为包括计算机。
38.(功能结构)
39.接下来,根据图3至图5,说明构成管理系统1的管理服务器300的功能结构。图3是
概略地示出管理服务器300的功能结构的一个例子的框图。管理服务器300构成为包括控制部301、通信部302、配送目的地信息数据库(配送目的地信息db)303以及地图信息数据库(地图信息db)304。通信部302具有用于将管理服务器300连接到网络n1的功能。通信部302能够通过管理服务器300中的通信i/f340实现。
40.配送目的地信息db303具有储存配送目的地信息的功能。配送目的地信息是与通过车辆100和无人机200配送的货物的配送目的地的位置有关的信息。配送目的地信息例如由管理服务器300的管理者输入。配送目的地信息db303能够通过管理服务器300中的辅助存储部330实现。图4是示出配送目的地信息的表格结构的一个例子的图。如图4所示,配送目的地信息包括货物id字段以及配送目的地字段。
41.在货物id字段中,输入有用于确定货物的标识符(货物id)。在本实施方式中,配送目的地信息具有用于输入多个货物的货物id的多个记录。即,通过车辆100和无人机200将多个货物配送到多个配送目的地。在配送目的地字段中,输入用于确定与输入到货物id字段的货物id对应的货物的配送目的地的位置的信息。在配送目的地字段中,例如,输入配送目的地的住址等。
42.地图信息db304具有储存地图信息的功能。地图信息是包括与车辆100和无人机200配送货物的地域的道路以及建筑物有关的地图的信息。地图信息db304能够通过管理服务器300中的辅助存储部330实现。
43.控制部301具有进行运算处理的功能,该运算处理用于进行管理服务器300的控制。控制部301能够通过管理服务器300中的处理器310实现。控制部301取得储存于配送目的地信息db303的配送目的地信息。控制部301根据取得的配送目的地信息,决定车辆100配送货物的配送目的地(以下有时称为“第1配送目的地”)。另外,控制部301根据取得的配送目的地信息,决定无人机200配送货物的配送目的地(以下有时称为“第2配送目的地”)。
44.具体而言,控制部301根据配送目的地信息,决定配送目的地密集的区域(以下有时称为“密集区域”)。控制部301根据输入到配送目的地信息中的配送目的地字段的多个配送目的地的位置信息,计算每单位面积的配送目的地的数量。控制部301根据计算出的每单位面积的配送目的地的数量,决定密集区域。而且,控制部301将密集区域内的配送目的地决定为第1配送目的地。另外,控制部301将密集区域外的配送目的地决定为第2配送目的地。此外,在本实施方式中,通过控制部301决定多个第1配送目的地和一个第2配送目的地。
45.另外,控制部301根据第1配送目的地的位置和第2配送目的地的位置,决定行驶路径、飞行开始地点以及归航地点。在此,行驶路径是包括在密集区域中车辆100将货物配送到多个第1配送目的地的路径的路径。另外,飞行开始地点是无人机200开始从车辆100向第2配送目的地飞行的行驶路径上的地点。另外,归航地点是无人机200回到车辆100的行驶路径上的地点。
46.在本实施方式中,控制部301首先将对多个第1配送目的地配送货物时效率最佳的路径计算为行驶路径。而且,控制部301在计算出的行驶路径上决定飞行开始地点和归航地点。在此,控制部301根据无人机200的可续航距离,决定飞行开始地点和归航地点。即,控制部301计算无人机200从飞行开始地点开始飞行、将货物配送到第2配送目的地、抵达归航地点为止的距离(飞行距离)。而且,控制部301以使无人机200的飞行距离为无人机200的可续航距离以下的方式,决定飞行开始地点和归航地点。
47.图5是示出在本实施方式中管理服务器300决定的行驶路径、飞行开始地点以及归航地点的一个例子的图。在图5中,示出车辆100和无人机200配送货物的地域的地图。如图5所示,密集区域由管理服务器300决定。在此,图5所示的密集区域是每单位面积的配送目的地的数量比预定的阈值大的区域。在图5中,第1配送目的地通过涂黑星标表示。车辆100沿着图5所示的行驶路径,将货物配送到密集区域内的多个第1配送目的地。
48.另外,在图5所示的例子中,无人机200将货物配送到作为密集区域外的配送目的地的第2配送目的地。在图5中,第2配送目的地通过扣白星标表示。无人机200从图5所示的飞行开始地点开始飞行,将货物配送到第2配送目的地。而且,无人机200在归航地点回到车辆100。这样,如图5所示,无人机200沿着从飞行开始地点经由第2配送目的地直至归航地点的飞行路径飞行。
49.控制部301在决定了行驶路径、飞行开始地点以及归航地点后,生成与行驶路径有关的行驶信息和与飞行路径有关的飞行信息。在此,飞行信息中包括飞行开始地点和归航地点的信息。另外,飞行信息中包括第2配送目的地的位置信息。而且,控制部301经由通信部302将行驶信息发送给车辆100。另外,控制部301经由通信部302将飞行信息发送给无人机200。
50.(决定处理)
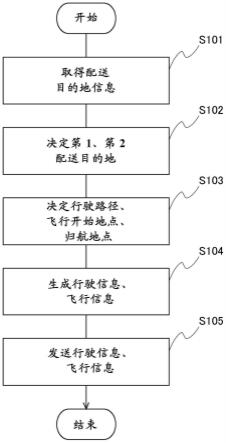
51.接下来,根据图6,说明在管理系统1中由管理服务器300中的控制部301执行的决定处理。决定处理是用于决定行驶路径、飞行开始地点以及归航地点的处理。图6是决定处理的流程图。
52.在决定处理中,首先,在s101中,从配送目的地信息db303取得配送目的地信息。接下来,在s102中,根据取得的配送目的地信息中的配送目的地的位置,决定多个第1配送目的地和第2配送目的地。具体而言,在s102中,决定密集区域,将密集区域内的配送目的地决定为第1配送目的地,将密集区域外的配送目的地决定为第2配送目的地。然后,在s103中,决定针对车辆100的行驶路径和针对无人机200的飞行开始地点以及归航地点。接下来,在s104中,根据决定的行驶路径生成行驶信息。另外,在s104中,根据飞行开始地点以及归航地点生成飞行信息。接下来,在s105中,将行驶信息发送给车辆100,将飞行信息发送给无人机200。然后,车辆100根据接收到的行驶信息,在行驶路径上行驶。另外,无人机200根据接收到的飞行信息,在飞行路径上飞行。然后,决定处理结束。
53.如以上说明的那样,管理系统1中的管理服务器300决定多个第1配送目的地和第2配送目的地。而且,管理服务器300决定行驶路径、飞行开始地点以及归航地点。由此,能够通过车辆100将货物配送到存在于适合利用车辆配送的位置的第1配送目的地。另外,能够通过无人机200将货物配送到存在于远离密集区域的位置的第2配送目的地。由此,车辆100无需移动至存在于远离密集区域的位置的第2配送目的地,就能够将货物配送到第2配送目的地。这样,利用管理系统1能够高效地进行货物的配送。
54.(变形例1)
55.在本实施方式中,无人机200将货物配送到一个第2配送目的地。然而,无人机200配送货物的第2配送目的地也可以是多个。另外,在本实施方式中,车辆100将货物配送到多个第1配送目的地。然而,车辆100配送货物的第1配送目的地也可以是一处。
56.(变形例2)
57.在本实施方式中,管理服务器300根据密集区域决定第1配送目的地和第2配送目的地。然而,管理服务器300也可以未必根据密集区域决定第1配送目的地和第2配送目的地。管理服务器300例如也可以将沿着预定的道路的预定的区域内的配送目的地决定为第1配送目的地,将沿着预定的道路的预定的区域外的配送目的地决定为第2配送目的地。在此,预定的道路例如是由于道宽为预定的宽度以上而车辆100易于配送货物的道路。由此,无人机200能够将货物配送到沿着不便于车辆100配送货物的道路(道宽为预定的宽度以下的道路)的配送目的地。这样也能够高效地配送货物。
58.(变形例3)
59.此外,管理服务器300也可以根据无人机200完成向第2配送目的地的货物配送的预定的时刻(以下有时称为“预定时刻”),决定归航地点。具体而言,管理服务器300计算无人机200从飞行开始地点向第2配送目的地配送货物所需的时间,计算预定时刻。而且,管理服务器300根据预测为在预定时刻车辆100所存在的位置、和第2配送目的地的位置,计算归航地点。管理服务器300例如根据车辆100的行驶速度和无人机200的飞行速度,以使预想车辆100抵达归航地点的时刻和预想无人机200抵达归航地点的时刻之间的差为预定的范围内的方式,计算归航地点。由此,还能够抑制先抵达归航地点的车辆100等待至无人机200抵达归航地点的时间。另外,能够抑制先抵达归航地点的无人机200等待至车辆100抵达归航地点的时间。其结果,能够抑制无人机200使用的电力或者燃料的消耗。
60.(变形例4)
61.在本实施方式中,无人机200在车辆100配送货物的途中归航。然而,无人机200也可以未必在车辆100配送货物的途中归航。管理服务器300也可以将归航地点决定在车辆100配送货物之前、或者配送货物之后的车辆100的行驶路径上。另外,在本实施方式中,在道路上决定飞行开始地点和归航地点。然而,也可以未必在道路上决定飞行开始地点和归航地点。例如,也可以在车辆100可行驶的广场等预定的场所,决定飞行开始地点和归航地点。在该情况下,车辆100的行驶路径被设定为在预定的场所行驶。
62.《第2实施方式》
63.在本实施方式中,在通过车辆100和无人机200配送货物的地域中,决定无人机200能够从车辆100开始飞行和回到车辆100的区域(以下有时称为“可出发到达区域”)。在本实施方式中,管理服务器300还根据可出发到达区域决定行驶路径、飞行开始地点以及归航地点。以下,仅说明与第1实施方式不同的点。
64.可出发到达区域例如是预想为车辆100以无人机200可安全地针对车辆100出发到达的预定的速度以下的速度移动的区域。在该情况下,例如,在预想为车辆100以超过预定的速度的速度行驶的道路(例如高速公路)上,无人机200无法安全地针对车辆100出发到达。因此,高速公路上有时并非可出发到达区域。
65.控制部301从储存于地图信息db304的地图信息,取得可出发到达区域。而且,控制部301根据多个第1配送目的地的位置、第2配送目的地的位置以及可出发到达区域,决定行驶路径、飞行开始地点以及归航地点。图7是示出在本实施方式中管理服务器300决定的行驶路径、飞行开始地点以及归航地点的一个例子的图。
66.在此,图7中的多个第1配送目的地的位置和第2配送目的地的位置与图5所示的多个第1配送目的地的位置和第2配送目的地的位置相同。关于多个第1配送目的地,与第1实
施方式同样地,将密集区域内的配送目的地决定为第1配送目的地。
67.另外,可出发到达区域被设定为图7所示的范围,所以图5所示的行驶路径未包含于可出发到达区域。因此,在车辆100在图5所示的行驶路径上行驶的情况下,无人机200无法针对车辆100出发到达。因此,控制部301以使行驶路径包含于可出发到达区域的方式决定行驶路径。而且,将行驶路径上的、包含于可出发到达区域的地点决定为飞行开始地点和归航地点。这样,在管理系统1中,即使在确定了可飞行区域的情况下,也能够高效地配送货物。
68.(变形例)
69.此外,在本实施方式中,可出发到达区域是预想为车辆100以无人机200可安全地针对车辆100出发到达的速度移动的区域。然而,可出发到达区域也可以是预想为车辆100以无人机200可安全地针对车辆100出发到达的速度移动的区域以外。可出发到达区域也可以是在周围有无人机200可从车辆100开始飞行的预定的宽度的区域。由此,能够抑制由于无足够用于无人机200出发到达的宽度,而在无人机200针对车辆100出发到达时产生危险的情形。
70.另外,可出发到达区域例如也可以是车辆100可临时停车的区域。在该情况下,管理服务器300将车辆100可临时停止的2个地点决定为飞行开始地点和归航地点。这样,车辆100在可出发到达区域中临时停止,从而无人机200能够安全地针对车辆100出发到达。
71.《第3实施方式》
72.在第1实施方式中,管理服务器300根据密集区域决定第1配送目的地和第2配送目的地。另一方面,在本实施方式中,管理服务器300根据配送目的地的高度,决定第1配送目的地和第2配送目的地。以下,仅说明与第1实施方式不同的点。
73.(管理服务器)
74.储存于管理服务器300中的配送目的地信息db303的配送目的地信息包括与配送目的地的高度有关的信息。具体而言,储存于配送目的地信息db303的配送目的地信息中的配送目的地字段除了配送目的地的住址以外,还包括与配送目的地的高度有关的信息。与配送目的地的高度有关的信息例如是关于配送目的地的建筑物中的楼层的信息。另外,与配送目的地的高度有关的信息也可以是与配送目的地的标高、海拔、或者以道路为基准的高度有关的信息。
75.管理服务器300中的控制部301还根据与各配送目的地的高度有关的信息,从配送货物的多个配送目的地中决定多个第1配送目的地和多个第2配送目的地。具体而言,控制部301根据与各配送目的地的高度有关的信息,将配送目的地的楼层是预定的楼层以上的配送目的地决定为第2配送目的地。另外,控制部301将配送目的地的楼层小于预定的楼层的配送目的地决定为第1配送目的地。
76.如以上说明,通过管理系统1中的管理服务器300将配送目的地的楼层是预定的楼层以上的配送目的地决定为第2配送目的地。由此,抑制车辆100的搭乘人员为了将货物配送到存在于建筑物的上层的配送目的地而移动至配送目的地存在的楼层。其结果,能够缩短将货物配送到多个配送目的地所需的时间。这样也能够高效地配送货物。
77.《其他实施方式》
78.上述实施方式只不过是一个例子,本公开能够在不脱离其要旨的范围内适当地变
更来实施。另外,在本公开中说明的处理以及单元只要不产生技术上的矛盾,就能够自由地组合实施。
79.另外,说明为由1个装置进行的处理也可以由多个装置分担执行。或者,说明为由不同的装置进行的处理也可以由1个装置执行。在计算机系统中,能够灵活地变更通过什么样的硬件结构(服务器结构)实现各功能。
80.本公开也能够通过将安装有在上述实施方式中说明的功能的计算机程序提供给计算机,由该计算机具有的1个以上的处理器读出并执行程序来实现。这样的计算机程序既可以通过能够连接到计算机的系统总线的非临时性的计算机可读存储介质提供给计算机,也可以经由网络提供给计算机。非临时性的计算机可读存储介质例如包括磁盘(软盘(注册商标)、或者硬盘驱动器(hdd)等)、光盘(cd-rom、dvd盘、或者蓝光盘等)等任意类型的盘、只读存储器(rom)、随机存取存储器(ram)、eprom、eeprom、磁卡、闪存存储器、或者如光学式卡的适合于储存电子指令的任意类型的介质。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。