技术特征:
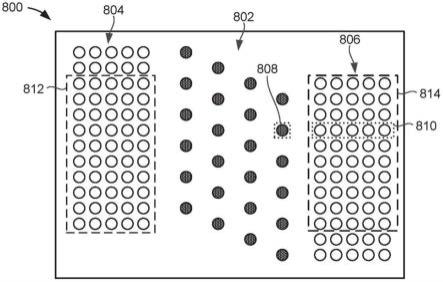
1.一种立体成像器系统,包括:传感器阵列,所述传感器阵列包括:多个测距光电传感器,一旦从发射器阵列发射的光已从场景中的物体反射,所述多个测距光电传感器就检测所述光;第一多个成像光电传感器,所述第一多个成像光电传感器定位在所述测距光电传感器的第一侧处;以及第二多个成像光电传感器,所述第二多个成像光电传感器定位在所述测距光电传感器的与所述第一侧相对的第二侧处,所述第一多个成像光电传感器和所述第二多个成像光电传感器检测所述场景中的环境光并且间隔开一定间隙;移动部件,所述移动部件耦接到所述传感器阵列并且能操作以使所述传感器阵列在完整的旋转图像捕获循环内在第一位置与第二位置之间移动;以及系统控制器,所述系统控制器耦接到所述传感器阵列和所述移动部件,所述系统控制器被配置成:使用所述多个测距光电传感器通过飞行时间计算来确定到所述场景中的物体的第一距离;在所述第一位置处用所述第一多个成像光电传感器捕获所述场景的第一图像,并且在所述第二位置处用所述第二多个成像光电传感器捕获所述场景的第二图像;基于所述第一图像和所述第二图像以及通过所述间隙确定的光学基线计算到所述物体的第二距离。2.根据权利要求1所述的立体成像器系统,其中所述多个测距光电传感器以对角交错的布置组织,并且所述第一多个成像光电传感器和所述第二多个成像光电传感器各自以矩形布置组织。3.根据权利要求2所述的立体成像器系统,其中所述第一多个成像光电传感器中的至少一些成像光电传感器和所述多个第二成像光电传感器中的至少一些成像光电传感器沿同一水平线定位。4.根据权利要求1所述的立体成像器系统,其中所述移动部件是使所述传感器阵列绕中心轴线旋转的电动马达。5.根据权利要求1所述的立体成像器系统,其中所述移动部件是反射光以移动视场的微机电系统(mems)装置。6.根据权利要求1至5中任一项所述的立体成像器系统,其中所述系统控制器被进一步配置成基于所述第一距离和所述第二距离计算到所述物体的最终距离。7.一种立体成像器系统,包括:传感器阵列,所述传感器阵列包括第一多个光电传感器和与所述第一多个光电传感器间隔开一定间隙的第二多个光电传感器,所述第一多个光电传感器和所述第二多个光电传感器被配置成检测场景中的环境光;移动部件,所述移动部件耦接到所述传感器阵列并且能操作以使所述传感器阵列在完整的旋转图像捕获循环内在第一位置与第二位置之间移动;系统控制器,所述系统控制器耦接到所述传感器阵列和所述移动部件,所述系统控制器被配置成:
通过指示所述移动部件在所述第一位置处用所述第一多个光电传感器从第一视角捕获所述场景中的物体的第一图像,并且在所述第二位置处用所述第二多个光电传感器从第二视角捕获所述场景中的所述物体的所述场景的第二图像,来移动传感器阵列的视场;并且基于所述第一图像和所述第二图像使用通过所述间隙限定的光学基线计算到所述物体的距离。8.根据权利要求7所述的立体成像器系统,进一步包括光检测系统,所述光检测系统包括:体接收器光学装置,所述体接收器光学装置被配置成接收源自所述立体成像器系统外部的场的光线;以及光学组件,所述光学组件具有在所述场中限定多个离散的非重叠视场的多个微光学接收器通道,所述光学组件包括:光圈层,所述光圈层具有沿所述体接收器光学装置的焦平面布置的多个离散光圈,所述第一成像光电传感器和所述第二成像光电传感器安置在所述光圈层后面;以及非均匀滤光器层,所述非均匀滤光器层被配置成允许不同微光学通道测量不同范围的波长。9.根据权利要求7或8所述的立体成像器系统,其中所述移动部件是使所述传感器阵列绕中心轴线旋转的电动马达。10.根据权利要求7或8所述的立体成像器系统,其中所述移动部件是反射光以移动所述视场的微机电系统(mems)装置。11.一种距离测量方法,包括:移动传感器阵列的视场,所述传感器阵列包括第一成像光电传感器和与所述第一成像光电传感器间隔开一定间隙的第二成像光电传感器;在所述视场移动时,在第一时间实例用所述第一成像光电传感器从第一视角捕获场景中的物体的第一图像;在所述视场移动时,在第二时间实例用所述第二成像光电传感器从第二视角捕获所述场景中的所述物体的所述场景的第二图像;以及基于所述第一图像和所述第二图像使用通过所述间隙限定的光学基线计算到所述物体的第一距离。12.根据权利要求11所述的方法,其中移动所述视场包括使所述传感器阵列绕中心轴线旋转。13.根据权利要求11所述的方法,其中移动所述视场包括在所述传感器阵列静止的同时反射光以移动所述视场。14.根据权利要求11所述的方法,进一步包括:将在所述第一图像和所述第二图像中捕获的所述物体的共有特征进行比较;以及使用来自所述比较的结果计算到所述物体的所述第一距离。15.根据权利要求11所述的方法,其中所述第一成像光电传感器包含在第一成像光电传感器阵列中,并且所述第二成像光电传感器包含在第二成像光电传感器阵列中。
16.根据权利要求15所述的方法,其中所述第一成像光电传感器阵列和所述第二成像光电传感器阵列各自是二维成像光电传感器阵列。17.根据权利要求15所述的方法,其中所述传感器阵列由二维成像光电传感器阵列形成,并且所述第一成像光电传感器阵列和所述第二成像光电传感器阵列各自是所述二维成像光电传感器阵列的子集。18.根据权利要求11至17中任一项所述的方法,进一步包括:使用测距光电传感器测量到所述物体的第二距离;以及基于所述第一距离和所述第二距离确定到所述物体的最终距离。19.根据权利要求18所述的方法,其中所述测距光电传感器位于二维测距光电传感器阵列中,并且所述第一成像光电传感器阵列和所述第二成像光电传感器阵列位于所述测距光电传感器阵列的相对侧上。20.根据权利要求19所述的方法,其中测距光电传感器阵列以对角交错的布置组织,并且所述第一成像光电传感器阵列和所述第二成像光电传感器阵列以矩形布置组织。
技术总结
一种立体成像器系统,包括:传感器阵列,其包括第一多个光电传感器和与第一多个光电传感器间隔开一定间隙的第二多个光电传感器,第一多个光电传感器和第二多个光电传感器被配置成检测场景中的环境光;移动组件,其耦接到传感器阵列并且可操作以使传感器阵列在完整的旋转图像捕获循环内在第一位置与第二位置之间移动;以及系统控制器,其耦接到传感器阵列和移动组件。系统控制器可以被配置成:通过指示移动组件在第一位置处用第一多个光电传感器从第一视角捕获场景中的物体的第一图像,并且在第二位置处用第二多个光电传感器从第二视角捕获场景中的所述物体的所述场景的第二图像,来移动传感器阵列的视场;并且基于第一图像和第二图像使用通过所述间隙限定的光学基线计算到所述物体的距离。学基线计算到所述物体的距离。学基线计算到所述物体的距离。
技术研发人员:A
受保护的技术使用者:奥斯特公司
技术研发日:2021.04.21
技术公布日:2023/2/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。