1.本实用新型涉及水下智能机器人技术领域,尤其涉及一种基于北斗定位的水下智能机器人辅助装置。
背景技术:
2.随着工业的发展,人类对能源的需求日益增加,而陆地资源也越来越少越来越匮乏,很难满足工业以及人类日常生活的能源需求。所以,势必会向海洋资源进军,开发丰富的海洋资源。因此,水下智能机器人被研发利用,因为海里和海底的情况十分复杂,还有巨大的水压,使得人类亲自下到海底成为困难,水下智能机器人应运而生,水下智能机器人应用在海洋资源考查,海底情况侦察工作中。水下智能机器人的开发和使用有利于人类更好的开展海洋资源勘探工作,开发利用海洋资源。伴随着水下智能机器人的研发,水下智能控制技术和水下智能追踪技术也不断地在被研发被完善。
3.1953年,美国研制出第一艘水下作业型潜水器,但由于水下机器人所涉及的新技术还不够成熟,如电子设备故障率高、通信匹配差、脐带电缆绞缠,以及吊放和回收等问题没有很好解决,因此难以被市场广泛接受,发展缓慢。直到1980年初,世界对水下智能技术的掌控才开始正式步入正轨,水下智能机器人的功能也不断被完善,水下智能控制技术和水下智能追踪技术也慢慢出现在大众视野,也被称作水下智能机器人的核心技术,随着人类需求的不断加大,水下智能机器人正在逐步的投入实际使用。
4.北斗海洋定位系统(海上北斗定位系统)也随着水下智能机器人的发展被不断的更新完善,目前已经有了很准确的定位结果,已被广泛应用。
5.在目前近70年的发展历程中,水下机器人的应用都较单一,或用于海底作业,或用于洋流水文检测,或用于海底拍摄,目前对综合性的水下智能机器人的研发较少,且缺少运用北斗定位技术的智能追踪类水下机器人。
技术实现要素:
6.本实用新型要解决的技术问题是针对上述现有技术的不足,提供一种基于北斗定位的水下智能机器人辅助装置,为水下智能机器人进一步提供辅助功能。
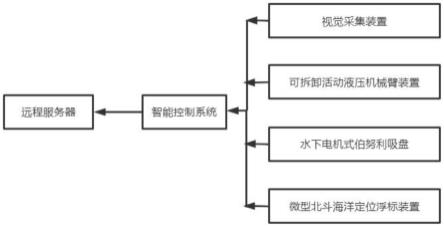
7.为解决上述技术问题,本实用新型所采取的技术方案是:一种基于北斗定位的水下智能机器人辅助装置,与水下智能机器人配合使用,辅助水下智能机器人实现海底拍摄、水下作业及位置定位,具体包括视觉采集装置、可拆卸活动液压机械臂装置、水下电机式伯努利吸盘、微型北斗海洋定位浮标装置和智能控制系统;所述视觉采集装置搭载在水下智能追踪机器人表面,用于实时采集可视范围内的海域图像视频信息,并通过智能控制系统将所采集的海域图像信息传输到远程服务器;所述可拆卸活动液压机械臂装置安装在水下智能追踪机器人的两侧,用于进行水下作业,且机械臂的类型可更换;所述水下电机式伯努利吸盘安装在水下智能追踪机器人的底部,用于将水下机器人吸附在舰艇表面;所述微型北斗海洋定位浮标装置包括多个微型北斗海洋定位浮标,安装在水下智能追踪机器人的顶
部匣仓内。
8.优选地,所述视觉采集装置包括4k摄像头、水下高清摄像头、电源模块和视觉控制器;4k摄像头和水下高清摄像头均与视觉控制器和电源模块连接,视觉控制器与智能控制系统连接。
9.优选地,所述可拆卸活动液压机械臂装置采用链式串联结构,包括可拆卸的机械臂、液压系统和动作控制器;所述液压系统为整个机械臂提供动力;所述动作控制器采用stm32控制板用于控制机械臂的动作。
10.优选地,所述微型北斗海洋定位浮标装置,包括环形锂电池组、配重体、北斗微型定位装置和上下外壳构成的球形微型浮标;所述环形锂电池组用于为北斗微型定位装置供电;所述北斗微型定位装置安装在上下外壳构成的球形微型浮标内;所述上下外壳均为半球状,合起来为一个球形微型浮标的外壳,上半球为空腔室,或者填充浮力型物质,下半球填装配重体,中间腔室放置北斗定位装置和锂电池组。
11.优选地,所述智能控制系统包括jetson模块、传输控制器和数据采集模块;所述传输控制器采用stm32控制板,与jetson模块、数据采集模块以及视觉采集装置中的视觉控制器均连接;所述数据采集模块用于采集水下智能追踪机器人周围海域的水温、水压和海水流速数据,并将采集的数据经传输控制器传输至远程服务器。
12.优选地,所述数据采集模块包括水温传感器、水压传感器和水下流速传感器,水温传感器用于对水下智能追踪机器人周围海域的水温进行测量,水压传感器用于对水下智能机器人周围海域的水压进行测量,水下流速传感器用于对海洋洋流以及海水流动速度的测量。
13.采用上述技术方案所产生的有益效果在于:本实用新型提供的一种基于北斗定位的水下智能机器人辅助装置,将北斗海洋定位技术融入水下智能机器人,通过加装视觉采集装置、水下机械臂装置、伯努利吸盘等实现水下智能机器人的多功能化,进而得到多功能综合性水下智能机器人。
附图说明
14.图1为本实用新型实施例提供的一种基于北斗定位的水下智能机器人辅助装置的结构框图;
15.图2为本实用新型实施例提供的视觉采集装置的结构框图;
16.图3为本实用新型实施例提供的可拆卸活动液压机械臂装置的结构框图;
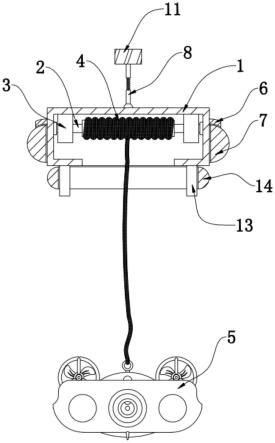
17.图4为本实用新型实施例提供的水下电机式伯努利吸盘的结构框图;
18.图5为本实用新型实施例提供的微型北斗海洋定位浮标装置的结构框图;
19.图6为本实用新型实施例提供的智能控制系统的结构框图;
20.图7为本实用新型实施例提供的一种基于北斗定位的水下智能机器人辅助装置的仰视图;
21.图8为本实用新型实施例提供的水下电机式伯努利吸盘的正视图;
22.图9为本实用新型实施例提供的可拆卸活动液压机械臂装置的左视图;
23.图10为本实用新型实施例提供的微型北斗海洋定位浮标装置的俯视图。
24.图中:1、水下伯努利吸盘;2、4k摄像头;3、水下高清摄像头;4、是可拆卸机械臂;5、
机械臂的液压系统。
具体实施方式
25.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
26.本实施例中,一种基于北斗定位的水下智能机器人辅助装置,与水下智能机器人配合使用,辅助水下智能机器人实现海底拍摄、水下作业及位置定位,如图1所示,具体包括视觉采集装置、可拆卸活动液压机械臂装置、水下电机式伯努利吸盘、微型北斗海洋定位浮标装置和智能控制系统;视觉采集装置搭载在水下智能追踪机器人表面,用于实时采集可视范围内的海域图像视频信息,并通过智能控制系统将所采集的海域图像信息传输到远程服务器;可拆卸活动液压机械臂装置安装在水下智能追踪机器人的两侧,用于进行水下作业,且机械臂的类型可更换,来进行多方面的水下作业;水下电机式伯努利吸盘安装在水下智能追踪机器人的底部,用于将水下机器人吸附在舰艇表面,以达到追踪、释放屏蔽信号、摧毁敌舰的目的;微型北斗海洋定位浮标装置包括多个微型北斗海洋定位浮标,安装在水下智能追踪机器人的顶部匣仓内,一次性可在水下智能追踪机器人的顶部匣仓中携带6、12、18、24个不等的微型北斗海洋定位浮标,水下智能机器人可定期释放定位浮标,进而通过北斗定位系统描绘出所追踪的路线。
27.本实施例中,视觉采集装置如图2所示,包括内置160
°
超大广角镜头的4k摄像头、水下高清摄像头、电源模块和视觉控制器;4k摄像头和水下高清摄像头均与视觉控制器和电源模块连接,视觉控制器与智能控制系统连接。
28.4k摄像头为周围海域图像信息采集的主要摄像头,水下高清摄像头用于辅助摄像,实现对4k摄像头采集信息的补充;160
°
超大广角镜头是为4k摄像头和水下高清摄像头对周围海域进行更大范围信息采集而设计的;电源模块采用9000mah电池为各摄像头独立工作供电,正常情况下,9000mah可以为同时搭载2个4k摄像头和6个水下高清摄像头供电4小时;控制器采用stm32核心板,控制器接收到两个摄像头采集的图像数据后进行压缩处理,通过水下智能控制系统传输至远程服务器。
29.可拆卸活动液压机械臂装置采用链式串联结构,包括可拆卸的机械臂、液压系统和动作控制器;液压系统为整个机械臂提供动力;动作控制器采用stm32控制板用于控制机械臂的动作;可拆卸的机械臂安装在水下智能追踪机器人的两侧上;同时机械臂可拆卸,在不同的作业任务中可选用不同的机械臂进行安装,以满足各种作业任务。本实施例中,可拆卸活动液压机械臂装置如图3所示,其中,可拆卸的机械臂包括依次顺序连接的回转臂、大臂、中臂、小臂a、小臂b、腕臂和抓手;所述回转臂安装在水下智能机器人的移动平台上,支撑整个液压机械臂,并实现整个机械臂的固定和回转,大臂和中臂实现机械臂大范围的俯仰,小臂a实现机械臂的横摆,小臂b实现机械臂小范围的俯仰,腕臂实现抓手的横摆和回转,抓手实现夹持功能。
30.水下电机式伯努利吸盘,如图4所示,包括吸盘主体、吸盘上下外壳、防水直流式电机、伯努利吸盘和主吸盘器;吸盘主体的型式包括短波纹型及扁平型;主吸盘器结构为矩体,柱体,锥体或球体;防水直流式电机独立工作,为吸盘主体工作提供动力;吸盘上下外壳用于保护主吸盘器;伯努利吸盘用于更快的吸附于舰艇表面。
31.微型北斗海洋定位浮标装置如图5所示,包括环形锂电池组、配重体、北斗微型定位装置和上下外壳构成的球形微型浮标;环形锂电池组用于为北斗微型定位装置供电,该锂电池组供电量大于200000mah,可供北斗微型定位装置工作15天以上;配重体可用于稳定该浮标定位装置,依靠配重体以保证不会由于海浪等客观原因导致浮标与原始定位位置偏差过大;北斗微型定位装置安装在上下外壳构成的球形微型浮标内;上下外壳均为半球状,合起来为一个球形微型浮标的外壳,上半球为空腔室,或者填充浮力型较大的物质,以便于浮标被释放后能够迅速上浮水面,下半球填装配重体,中间腔室放置北斗定位装置和锂电池组。
32.北斗微型定位装置是基于北斗卫星通信定位系统平台所研发设计出的一种带有定位功能的微型装置,将北斗微型定位装置安装与微型浮标内,即可在远程北斗信息定位平台上锁定浮标被释放的大致位置。同时可通过电子海图与北斗监控平台相连,实时将各个浮标的位置在电子海图上显示出来,从而描绘出水下智能机器人所追踪的大致路线。
33.智能控制系统如图6所示,包括jetson模块、传输控制器和数据采集模块;jetson模块可用于视觉建立与整合,通过综合视觉采集装置来构成一个多角度完善的视觉采集模块;传输控制器采用stm32控制板,与jetson模块、数据采集模块以及视觉采集装置中的视觉控制器均连接,用于将jetson模块、数据采集模块以及视觉采集装置采集的数据进行处理后传输至远程服务器;数据采集模块用于采集水下智能追踪机器人周围海域的水温、水压和海水流速数据,并将采集的数据经传输控制器传输至远程服务器。
34.数据采集模块包括水温传感器、水压传感器和水下流速传感器,水温传感器用于对水下智能追踪机器人周围海域的水温进行测量,水压传感器用于对水下智能机器人周围海域的水压进行测量,水下流速传感器用于对海洋洋流以及海水流动速度的测量。
35.本实施例中的9000mah电池和环形锂电池都可在电量充足的情况下独立工作,在电量不足的情况下,可通过该水下智能机器人的电力供能模块进行电量的补充,以保证在海里作业的持续工作性。
36.本实施例中,基于北斗定位的水下智能机器人辅助装置、水下电机式伯努利吸盘、可拆卸活动液压机械臂装置和微型北斗海洋定位浮标装置的结构示意如图7-10所示,其中,图7中的基于北斗定位的水下智能机器人辅助装置的仰视图可以看到水下伯努利吸盘1,4k摄像头2,水下高清摄像头3,可拆卸机械臂4和机械臂的液压系统5。
37.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型权利要求所限定的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。